汽车安全距离预警系统的设计
2016-11-16德州学院汽车工程学院郑茂平张长坤
德州学院汽车工程学院 郑茂平 张长坤
汽车安全距离预警系统的设计
德州学院汽车工程学院郑茂平张长坤
论文阐述了汽车安全距离预警系统的设计,通过对传感器的选择、传感器的布局设计,控制装置的选择和操作流程进行设计,以及显示界面预警方式的设计,实现对车距的安全预警,达到保护驾驶人安全的目的。
距离预警系统;安全距离;制动距离;程序流程
1 前言
据统计,在近几年的交通事故中车与车的事故占总交通事故的52%,其中追尾和车体接触占37.4%。由此可知,汽车间的追尾和接触是造成交通事故的一个重大原因。在对高达52%的交通事故进一步分析后发现,发生事故的原因与车速过高和驾驶员的反射弧及踩下踏板所用的时间有关。因此,如何避免让高速行驶中的汽车发生追尾或车体接触,是一个急需解决的重要课题,设计出一套安全车距预警系统辅助汽车驾驶人安全出行驾车是完成此课题的较好方法之一。
2 汽车安全车距预警系统的设计
2.1汽车安全车距预警系统的构成
汽车安全车距预警系统由两部分组成。一部分是汽车安全车距预警系统,该系统在探测到出现危险情况时提前发出警报。另一部分是自动制动系统,该系统在传感器探测到车距具有危险时才起作用。该汽车安全车距预警系统的硬件主要包括车距传感器、车距预警控制ECU装置和人机交互界面组成。
2.1.1汽车安全车距预警传感器的选择及布置设计
汽车车距传感器,目前分雷达、视频影像和声纳三种。其中雷达传感器探测范围为0.5~100m,视角9°,采样速率200Hz,精度0.01m;视频影像传感器探测范围0.05~30m,视角60°,采样速率24Hz,精度0.1m;声纳传感器探测范围0.025~10m,视角17°,采样速率8Hz,精度0.05m。分析三者参数后选择雷达传感器。雷达传感器中又包括激光雷达和微波雷达,对两者参数进行比较后发现激光雷达的探测结果容易随极端天气情况及光学的污染降低,但总体上激光雷达比微波雷达更优秀,因此选择传感器为激光雷达传感器。
同时在汽车行驶状况探测方面要注意传感器的布置以及选择的方式,确保各个传感器能准确反映汽车的实时行驶状况,因此把激光雷达距离传感器安装在发动机盖前端和后备箱盖末端;轮速传感器安放在车轮总成的非旋转部分(如转向节臂或轴头)上;加速传感器放置在发动机舱内或行李舱内;转向角传感器放置在转向轴管上;油门动作传感器放置在节气门体上的节气门轴的一端;制动动作传感器放置在制动踏板支架处。通过这些传感器,使汽车控制装置更好更全面地接受汽车周围状况和汽车自身情况。
2.1.2车距预警控制装置组成
该安全车距预警控制装置具有计算车距、危险车距评估、危险车距警报等功能,它的硬件包括信息采集、油门控制、制动控制的ECU组组成。其中ECU组控制装置选择MCS-51系列单片机中增强型产品8052,在8052的片内数据存储器中存入汽车安全车距的执行流程。当传感器传来的信息经ECU组分析处理后,分别将执行指令传达到油门控制装置和制动控制装置中执行。
2.1.3执行装置组成选择
这套汽车安全距离预警装置系统的执行装置选择了比较人性的人机交互界面系统。它包括自动报警系统、自动制动系统、MSB模块、显示行车信息界面等组成。当执行装置中的人机交互界面接收到信息采集ECU发来的危险车距信息时,人机交互界面将会出现不同级别的警告闪烁动画和语音提示。当极其危险时自动制动系统自动启动,保护车内人员安全。
3 汽车安全车距预警系统的实现
3.1汽车安全距离和制动距离的计算公式分析
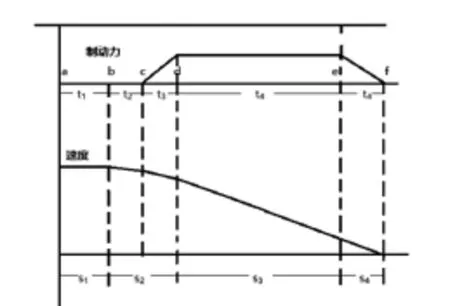
图1 汽车制动阶段图
当行驶安全距离大于制动距离时,安全距离预警系统才能生效。所以精确计算出汽车安全距离和制动距离是该系统能否实现的重要因素。经分析发现,两者相差的距离是驾驶员从看到信号到人体反应时间所经过的距离即图1中的s1。这时t1因不同驾驶员体质的差别而有所差别,一般在0.3~0.7s之间。
(1)驾驶员的反应时间,为图中的t1时段。假设汽车经过的距离为s1,则:

式中v为速度,单位为km/h;t1为反应时间,单位为秒,分母3.6是由单位换算产生的(下同)。
(2)制动器踏板作用时间t2。制动器踏板作用时间由两个阶段组成:t3为制动器间隙时间;t2″则为制动器达到制动作用的时间。t3和t4一般分别为0.03s和0.2s;气动制动时,则一般分别为0.2~0.3s和0.4~1s。经过的距离通常按式3-2计算:

(3)持续制动时间t3。制动力达到最大,产生明显的拖印和滑移,这段距离s3按式3-3计算:

式中φ为附着系数(即滑动摩擦系数),决定于路面和气候。根据对全过程的分析可知:
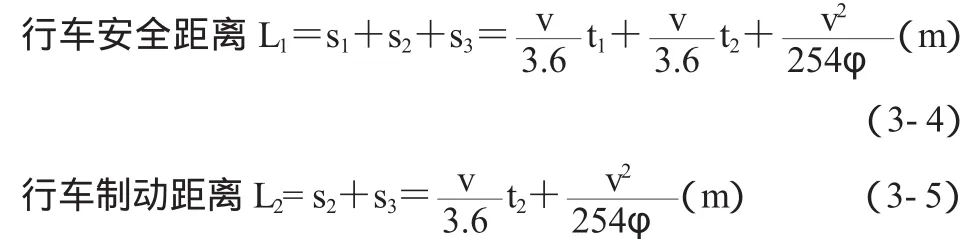
根据以上两式即可计算出行车的安全距离和制动距离的大小。
3.2汽车安全距离预警控制装置执行流程设计
行驶中的汽车将与前方车辆之间的距离通过雷达传感器测得后经总线传达到控制装置系统中,控制装置中的ECU组在内设的程序下进行分析计算处理。在传感器读取数据及控制装置ECU计算出数据后,执行流程如下:
当L1>L2时汽车正常行驶,显示界面闪烁显示:“车距安全请放心行驶!”。
当L1=L2时显示界面闪烁显示:“车距已进入危险区!”并伴有提示音:“请注意减速行驶”,若此时驾驶人没有采取人工油门制动,系统将自动执行油门制动降低车速。

图2 系统主控制装置程序流程图
当L1<L2时汽车进入车距危险距离,显示界面闪烁:“车距危险!”并伴有提示音:“当前车距危险请减速!”若驾驶员没有采取人工刹车制动,系统将会自动启动刹车制动系统。图2是该系统的执行流程图。
4 总结
此安全车距预警系统由激光雷达传感器、车载安全车距预警ECU和人机交互界面组成。在汽车高速行驶时,此系统可以辅助驾驶员安全驾驶,缓解了驾驶员驾车时的紧张,扩大了驾驶员的视野,大大提高了驾车的安全性。
[1]赵炜华.高速公路碰撞预防报警系统传感器及电源研究[D].西安:长安大学载运工具运用工程,2004.
[2]岳昕,康文,李会,徐凯宏.高速公路汽车追尾事故智能预警系统的研究[J].哈尔滨:森林工程,2005.
[3]教育部师范教育司组织.中学物理与现代科技·我们周围的物理学[M].上海科技教育出版社,2002.
[4]余志生.汽车理论(第三版)[M].北京:机械工业出版社,2006.
