智能仓储机械手的结构设计
2016-11-12王晓天
王晓天

摘 要:工业机械手在工业生产的各个方面得到广泛使用。文章根据国内外先进的机械手技术,设计出一种用于物料搬运,结构简单,维护方便的机械手的结构。主要设计机械手臂部分和机械手抓手部分的机构。
关键词:机械手;机械手臂;机械手抓手,结构设计
中图分类号:TP242.6 文献标识码:A 文章编号:1006-8937(2016)29-0003-02
1 引 言
目前工业机械手面临的问题主要还是成本的高昂和精度控制的不易达到要求。从工业机械手的具体应用情况来看,生产过程的机械自动化已成为现代工业的主要问题。虽然现代机械制造业中的加工、装配等各生产工序主要是间断的,但自动化生产中装卸、搬运等工序亟待实现机械化,工业机械手的出现便可满足这一需求。无论国内还是国外,工业机械手的应用前景广阔,而对机械手使用性能的要求则越来越高,面对越来越多样的产品需求,机械手结构上在向着小巧型,灵活型的方向发展,因此机械手结构设计的合理性变的至关重要。
2 机械手结构设计
2.1 机械手手臂部分原理
欲满足机械手的搬运功能,即将货物从某一水平高度提升至另一水平高度,可采用曲柄连杆机构实现规定搬运动作。本课题应用平行四边形机构的运动特点,依靠电动推杆驱动平行四边形机构转动实现货物高度上的变化。
平行四边形机构是一种平面连杆机构,由于构件联接呈平行四边形,因此也叫做平行四边形机构。平行四边形机构结构简单,易于分析,构件运动一致性好,广泛应用于各种实现平移搬运等功能的机构。
2.2 机械手手臂部分结构设计
机械手手臂在整个工作过程中起着至关重要的作用。本文所设计的机械手臂为平行四边形机构,由于机械手臂也是机械手负载的主要施加部位,故应具有良好的强度与刚度,保证在机械手工作中不能发生弯曲或折断的情况,同时搬运机构若过于沉重则会影响搬运功能的实现。
工业铝型材表面经氧化处理后,外观漂亮且耐脏,工作中沾染的油污易于清洗,可根据不同承重采用不同规格型材组装,同时搭配铝型材配件,无需焊接,安装拆卸方便,轻便环保,整体机械性能较好,广泛应用于生产制造行业。
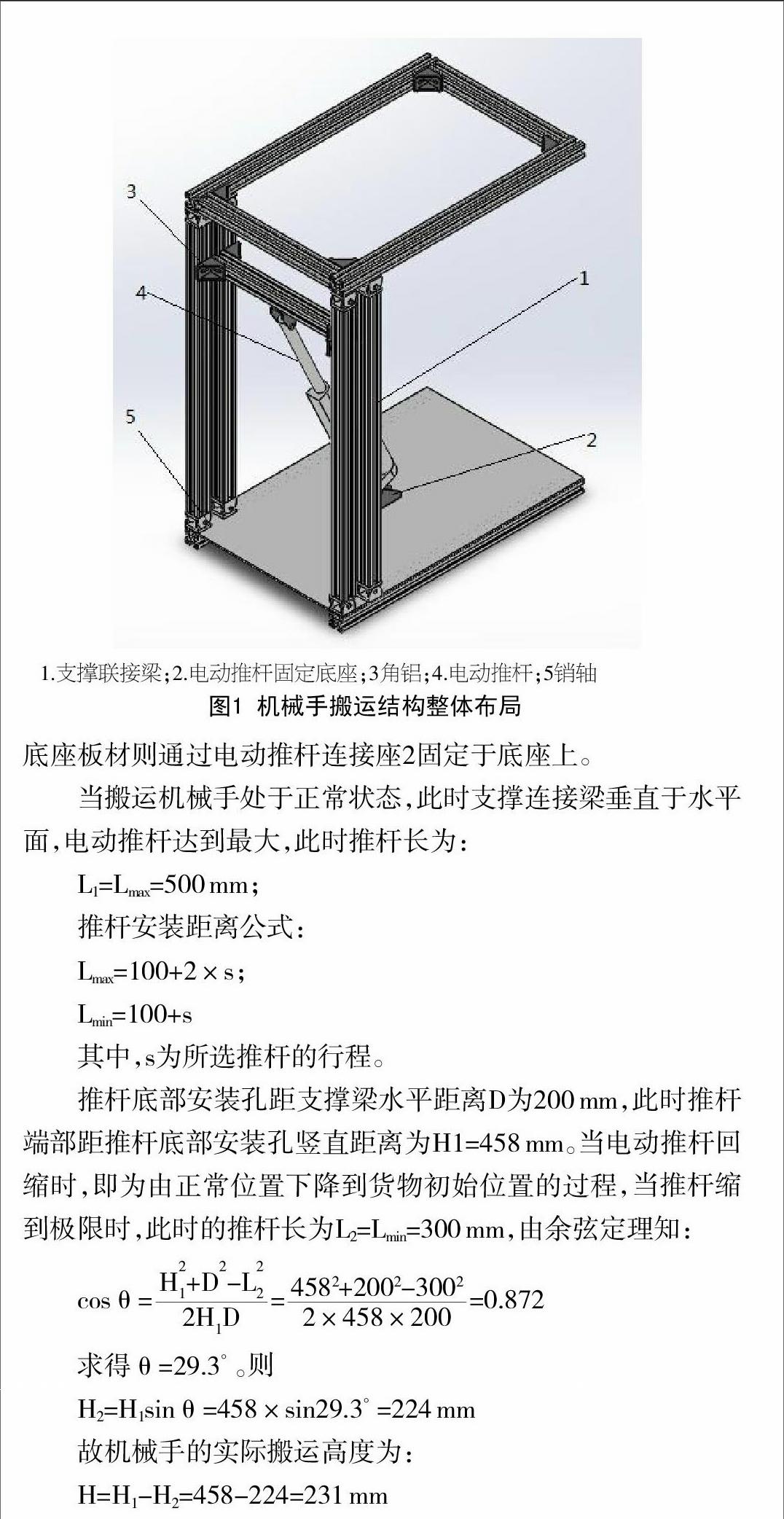
本文的搬运机构选用密度小强度大并广泛应用于工业机械手行业的工业铝型材较为合适。机械手手臂结构整体布局及各个部件,如图1所示。
机构中的工业铝型材之间通过铰接的方式联接而成,支撑连杆梁1通过销轴5与固定在底座板材上的连接件联接,由角铝3将支撑梁与联接电动推杆4的横梁联接起来,而电动推杆4与底座板材则通过电动推杆连接座2固定于底座上。
2.3 机械手抓手部分原理
搬运机械手末端的机械手爪是机械手直接与货物接触的部分,机械手爪能够直接完成对货物的拾取和夹紧动作,它可以依据人手动作通过设计实现相应功能,通常机械手爪被安装在手臂的端部。机械手爪结构形式与人手有较大区别,它的结构外形拥有机械式的特点,通过不同部件的联接组合完成指定运动过程,依靠自身的运动而将物件抱住,故手爪即为主要的传力构件。
本课题所设计机械手的手部结构应为钳爪式,钳爪式手部结构包括手指和传力机构。如图2所示,机械手爪1在电动推杆的驱动下向右移动,当左部碰到左侧连杆机构时带动手爪2处,机械手爪的两部分1、2完成张开手爪动作;当右侧手爪在电动推杆缩回时,手爪2在弹簧作用下回复原来位置实现对货物的抓取动作。
2.4 机械手抓手部分结构设计
对机械手爪设计过程中,应考虑以下几个方面:机械手爪部件至少要有一定负载承受力,在将货物重量计入影响后,鉴于搬运动作中由于颤动所产生的影响也应适当增大设计强度,避免工件发生松动或脱落的情况。
为使机械手爪和被运输货物间保持较为稳定的姿态,应根据货物的实际外形设计相应的末端执行机构形状。所设计机械手爪主要受到被夹持物的反作用力,必须达到设计所需强度和刚度防止手爪断裂或弯曲变形的状况发生,同时设计机械手结构应该简单,缩小尺寸,尽量轻便以免影响运动过程。本文所设计机械手结构,如图3所示。
其中,机械手抓取动作的通过以下动作实现:由电动推杆1伸长驱动一体式小抓手向右移动,同时与一体式小抓手通过螺栓连接的连接杆4被带动向右移动,当连接板5接触到连杆6时,在连杆机构作用下,连杆8将沿水平方向向左移动直至小抓手突出部分完全缩回连接板9内,此时连接板右端面接触货物,电动推杆1缩回直至右侧一体式小抓手3上的连接板与货物接触并实现夹紧,在回缩过程中,当连接板5与连杆6不再接触时,连杆8在弹簧7的作用下回复原位,两个机械手爪的承重板通过支撑货篮的缺口位置,完成对货篮的抓取动作。
3 结 语
本文主要设计一种用于搬运货物的机械手,在生产过程中的搬运货物环节里替代工人,提高工作效率,节约更多的人力成本和物力成本。主要进行机械手的结构设计,通过对机械手臂和机械手抓手的结构设计,使整个机械手机构较为简单,维护方便。
参考文献:
[1] 王晓东.机器人技术其础[M].哈尔滨工业大学出版社,2003
[2] 徐元昌.工业机械手[M].北京:中国轻工业出版社,2001
[3] 牧野洋,谢存禧,郑时雄.空间机构及机器人机构[M].北京:机械工业出 版社,2003.248~26
[4] 刘明保,吕春红.机械手的组成机构及技术指标的确定[J]. 河南高等 专科学校学报,2004,1(1).
[5] 张杨林.国内工业机器人市场及发展趋势[J].大众科技.2006(6): 191-192 .
[6] 李刚,周文宝.直角坐标机器人简述及其应用介绍[J].技术纵横.2008(9): 72-75 .
