城市规划与建筑虚拟现实多通道投影系统的研究与实现
2016-11-12王晓红绵阳职业技术学院四川绵阳621000
王晓红(绵阳职业技术学院,四川 绵阳 621000)
城市规划与建筑虚拟现实多通道投影系统的研究与实现
王晓红(绵阳职业技术学院,四川 绵阳 621000)
文章针对城市规划与建筑中不能准确实现规划目的,提出建立以沉浸式显示和实时交互为主要功能的虚拟现实实验室环境与新一代数字媒体科技创新平台,该平台采用基于OpenGL工业级三维图形标准的虚拟现实软件作为二次开发的高层API,重点论述了三维沉浸式显示系统中多通道投影的方法。实验结果表明,利用该方法可以实现地形建模的要求,为实际施工提供准确的信息,可以达到最初的设计规划目的。
虚拟现实;沉浸式显示;OpenGL;多通道投影
1 概 述
虚拟现实技术可用于建筑视景与数字城市规划、虚拟制造/设计/装配及虚拟维修应用、驾驶模拟仿真训练、文物古迹数字复原保护、人工智能及远程控制操作、地形地貌/地理信息系统(GIS)、生物工程(基因/遗传/分子结构研究)、虚拟地质/矿产/石油勘探等领域的教学科研工作。我国城市化进程正在加速,四川灾后建设任务繁重,建筑与城市规划设计行业人才的需求量旺盛,对人才培养规格的要求越来越高,虚拟现实技术应用于建筑与城市规划教育领域便可提供这样一个综合型的高技术教学环境。虚拟现实实验室使建筑设计、城市设计等创作研究在参与、体验及交互的过程中进行,是对传统设计过程的颠覆,建设虚拟现实实验室,将有力地推进设计实验教学内容、教学体系、教学方法和教学手段的重大变革。虚拟现实方法还可成为分析研究地震破坏与灾后建设研究的重要技术手段。通过模拟地震发生场景,对自然环境要素与人工环境要素进行参与式与体验式的分析研究;可参与灾后自然环境与人工环境的恢复建设各个领域的技术研究。本文针对城市规划和四川灾后重建,采用基于OpenGL工业级三维图形标准的虚拟现实软件建立城市规划与建筑虚拟现实仿真实验平台,更好地呈现虚拟现实技术的特点,为实际设计和建筑提供理论依据。
2 开发与渲染平台
采用高性能的QUADRO PLEX系列专业虚拟现实工作站作为图像生成处理的硬件开发平台。软件平台部分采用基于OpenGL工业级三维图形标准的虚拟现实软件作为二次开发的高层API,用于建立三维图形场景驱动和软件开发环境。
3 三维沉浸式显示系统
沉浸式场景漫游系统通常采用头盔式显示器、洞穴式立体显示装置等设备[1],它封闭我们参与者的感觉器官、听觉器官和视觉器官,为参与者提供一个全新的、身临其境的虚拟空间,并利用空间位置跟踪定位设备、数据手套、其他手控输入设备、声音设备等。使得参与者产生一种完全投入并沉浸于其中的感觉,是一种较理想的虚拟现实系统[2]。其系统结构及工作流程图如图1所示。

图1 系统结构与工作流程图
3.1 多通道投影系统几何校正
所谓的多通道投影系统,就是由多个投影机拼接在一起,但这种拼接,不是简单的摆放,而是按照一定的空间位置有规律的排列,从而在头盔式显示器大屏幕上显示出具有逻辑上一致的全景模拟图像。但这种多通道投影有两个关键问题需要解决。
第一,图像被投影到弧形幕或球幕上时会发生几何变形(即非线性失真),因此需要对投影图像进行几何校正[3]。
第二,多个投影机的投影图像拼接在一起时,它们的边缘部分会有一定程度的重叠,重叠区的亮度是非重叠区亮度的2倍,因此需要实现投影图像间亮度的平丫冷过渡,即边缘融合[4]。
OpenGL几何校正
①几何校正的基础就是要求投影仪生成的正常图像和几种辅助调试的画面能准确投影到弧形幕或球幕上。
②几何校正最为关键步骤是在弧形幕或球幕上生成能与我们在实际投影曲面有一模一样的贴图曲面。为了最大程度地减少因投影幕施工人为因素而造成变形的影响,并且方便后续的贴图处理。在处理复杂的问题时候,我们往往将其简单化,采取片状网格投影曲面的方式,把它们简化为N行和N列。假如投影曲面的某一处的曲率值与标准弧不同时,我们可以通过调整该处与之相对应的网格外形的方法来使投影幕的外形与其适应和一致。片状网格与投影屏幕的拟合度成正比,如果片状网格的行与列划分得越精细、网格数量越多,那么几何校正的效果就越好。还有一个影响失真的是投影仪与视点的空间几何位置,如果他们不保持一致,也会产生失真。通过调整网格外形、投影仪与视点的空间几何位置,才会使得重新生成的画面不失真。
③对帧缓存的复制。作为贴图,我们按照投影屏幕行列详细划分的份数,对其进行网格化纹理处理,然后依次贴在与之相对应的网格曲面上。在帧缓存的复制,图像纹理化的处理、贴图等操作过程时需要在一帧的时间之内全部完成,所以这就需要我们在失真可接受的范围之内尽可能减少对片状网格数的划分数量,保证在有限时间内完成对帧缓存的复制。[5]
3.2 虚拟场景(Virtual scene)与真实数据融合
虚实配准问题是增强现实或沉浸式虚拟现实的关键技术。实现虚拟信息与真实场景或数据的正确匹配或有机结合是每个增强现实应用系统或沉浸式虚拟现实系统都必须完成的一项重要任务[6]。在这个重要任务中,其核心就是图像的边缘融合。问题是怎么样使投影重叠区之内 2台或者多台投影仪的输出亮度同单台投影仪输出的亮度一模一样。
通过视景贴图融合、适当变换贴图曲面边缘亮度,可以得到图像亮度在屏幕重叠区如何变化,经过实验得出是其按照二次曲线递增或者衰减,并且其相邻的图形图像边缘亮度变化防止了图像的失真,相互之间形成互补保证图像清晰。文章采用的是典型的二次曲线,其亮度变化如图2所示。由图可以看出,右侧投影亮度边缘融合区域随着距离从 0逐渐变化到1,左侧投影亮度边缘融合区域随着距离从1变化到0。经过这样处理就完成了图像的全部边缘融合。
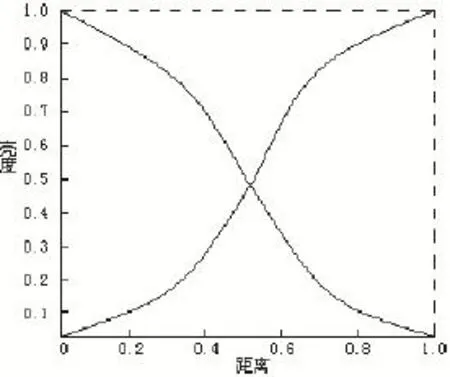
图2 亮度变化曲线示意图
因为实验场地的坐标系与虚拟场景的坐标系在坐标轴的方向、坐标原点的差别,还有就是他们的方向是右手系还是左手系都会有不同,所以为了实现虚实配准,需要对系统的输出数据进行跟踪处理,即就是坐标变换。
当头部定位仪器戴在我们头上时,相机此时位于头顶并且朝着与地面方向垂直向上的,我们称之为头顶相机。在沉浸式场景漫游系统中,我们的第一人称相机是跟人眼位置和姿态都一样的相机。所以,在沉浸式场景漫游系统中来模拟人眼的时候,我们添加一个向前的相机,其实这个相机是完美虚构的。按照视觉原理,可以标定得到向前相机相对头顶相机的位置变换矩阵。下面是4种坐标系的定义,如图3所示。
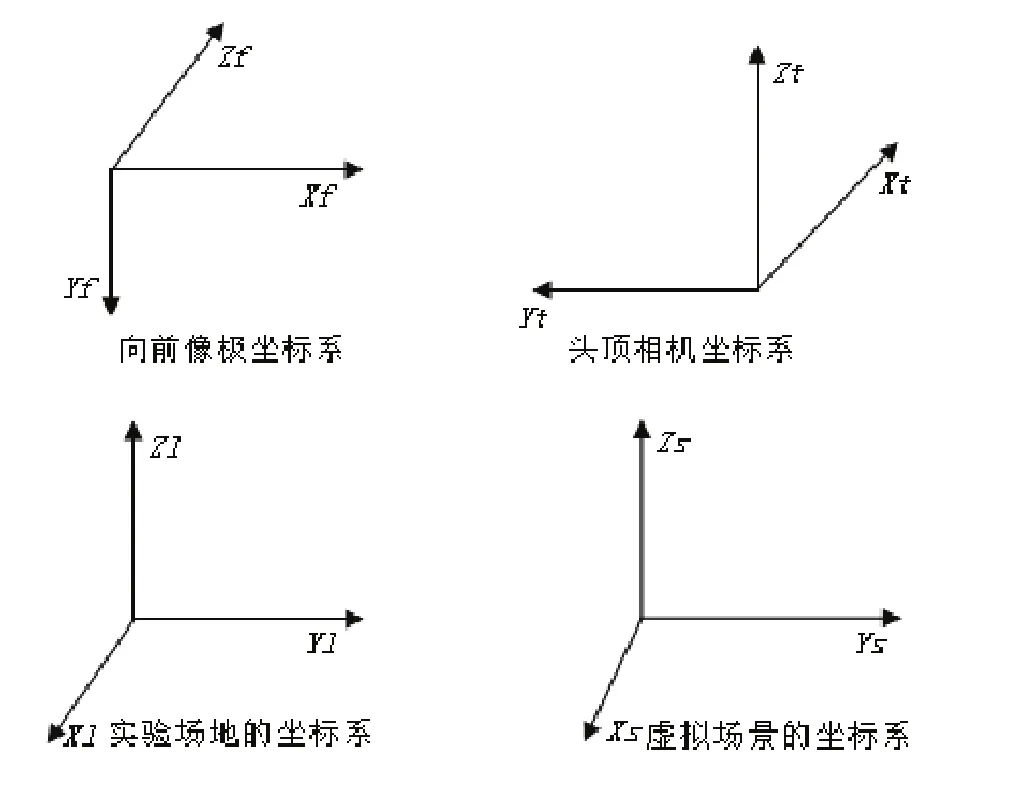
图3 4种坐标系的定义图
下面,分四个步骤来进行坐标变换:
第一步,调用高性能高精度的摄像机跟踪定位系统的接口,从中得到头顶摄像机的准确定位,也就是头顶摄像机在实验场地坐标系下的姿态和位置。用矩阵表示为
第二步,由高性能高精度的摄像机跟踪定位系统标定的向前摄像机相对头顶摄像机的坐标变换矩阵通过计算可以得出向前摄像机在实验场地坐标系下的姿态和位置,可以表示为用下列公式表示:

第三步,由实验场地坐标系与虚拟场景坐标系之间的换算关系,我们可以得到坐标变换矩阵通过计算可以得出头顶摄像机和向前摄像机在虚拟场景坐标系下的姿态和位置,分别表示为和用下列公式表示:

第四步,使用软件里的数据库步函数设置向前和头顶2个摄像机的姿态和位置。
4 结 论
在文献[6-10]的基础上,根据城市规划与建筑虚拟现实建模的特点,提出了基于OpenGL工业级三维图形标准的虚拟现实软件建模的方法,以三维沉浸式显示系统详细研究为重点,阐述了沉浸式场景漫游系统中多通道投影的几何校正和虚拟场景与真实数据融合的解决方法,实验结果表明技术路线可行,可以达到虚拟现实仿真的要求。该方法对于构建城市复杂地形建模具有一定的指导意义。
[1]赵维,谢晓方.基于自由行走的沉浸式漫游装置[J].计算机工程,2009,35(15):265-269.
[2]Adams L.Visualization and Virtual Reality[M].McGraw-Hill Publishing,1993.
[3]胡文聪.多投影增强现实系统的研究[D].上海:上海交通大学,2009.
[4]何跃明.多投影大屏幕系统的自动构建方法[D].杭州:浙江大学,2007.
[5]李新.水电站虚拟环境中的沉浸式人机交互技术研究[D].南京:南京理工大学,2011.
[6]字建香.高精度定位跟踪系统辅助下的沉浸式场景漫游系统构建[D].北京:中国地质大学,2012.
[7]吴华兴,康凤举,黄伟,等.基于虚拟现实环境的飞机显控系统软件仿真[J].系统仿真学报,2012,24(6):1232-1235.
[8]朱翠兰,董明晓,邱鲁江,等.塔式起重机视景仿真系统场景建模与驱动[J].山东建筑大学学报,2012,27(3):284-288.
[9]徐刚,王春燕.基于虚拟现实建模语言的医学体数据三维重建研究[J].自动化与仪器仪表,2012,162(4):38-40.
[10]段红霞.虚拟现实技术在工程建设管理中的应用[J].青岛理工大学学报,2012,33(3):35-38.
TU17
A
1007-7359(2016)02-0245-03
10.16330/j.cnki.1007-7359.2016.02.087
王晓红(1968-),女,四川绵阳人,高级工程师。
