一种在圆锥扫描系统中调试耦合的方法
2016-11-10王喜明
王喜明
一种在圆锥扫描系统中调试耦合的方法
王喜明
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
针对在圆锥扫描跟踪系统中,接收机解调出的方位和俯仰误差电压存在耦合,耦合大时,既不利于天线跟踪,也容易引起结构件的磨损,降低设备使用寿命,因此构建并提出一种通过移相技术降低交叉耦合的方法。同时对圆锥扫描原理以及实现的方法进行了简要介绍,给出了圆锥扫描以及基准的时序图,最后给出了在单片机定时器里实现这种算法的程序。
卫星通信;圆锥扫描;接收机;相位;交叉耦合;跟踪
在我国卫星通信事业的发展中,雷达天线跟踪目标卫星应用越来越广泛,有多种跟踪体制可以选用,常用的跟踪体制有程序跟踪、单脉冲跟踪、圆锥扫描跟踪、步进跟踪。每一种跟踪方法,都有自己的特点。其中圆锥扫描跟踪技术是由波束转换技术发展而来的,即由波束来回转换改变为波束绕天线轴线连续旋转,来获得目标偏离天线轴线的角位置误差信号,由误差信号驱动角伺服系统把天线向误差减小的方向转动,从而跟踪目标。圆锥扫描跟踪,对接收机只在出厂前进行校相,出厂后无需再校相,方便使用。本文简单介绍一种圆锥扫描技术的实现方法,以及通过单片机的定时器的延时功能调节接收机的误差电压耦合,这种方法可以把耦合调整到最佳状态,使天线能够精确的跟踪目标。
1 圆锥扫描跟踪原理
图1中给出了圆锥扫描跟踪原理[1]。
当目标处于天线轴线上时,波束旋转一周,目标回波脉冲幅度不变;当目标偏离轴线时,波束旋转一周接收到的目标回波脉冲的幅度大小形成一个周期性的变化。这个输出的视频脉冲包络调制则包含了目标角度偏离的误差信息。包络调制的幅度正比于角偏离的大小,其相位相对于波束扫描的相位则标示角偏离的方向。把这样的信号送给接收机,接收机就能解算一个方位误差信号、一个俯仰误差信号,误差信号送给伺服系统,伺服系统就能驱动天线跟踪目标卫星。
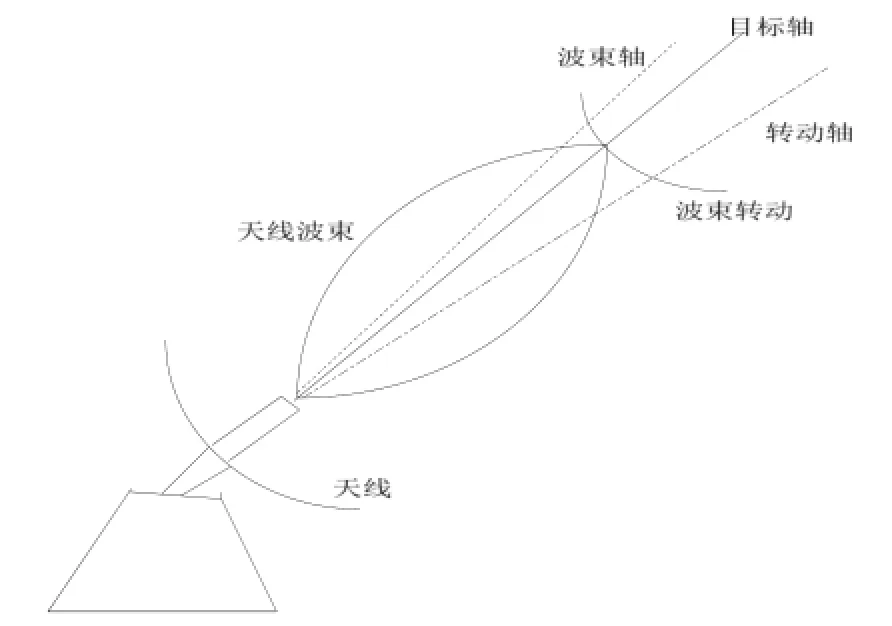
图1 圆锥扫描原理图
2 圆锥扫描跟踪实现方法
在圆锥扫描跟踪系统中,实现圆锥扫描的方法有多种,目前主要应用的有旋转天线的馈源、章动天线馈源、旋转天线副反射面等。圆锥扫描测角跟踪原理是将波束轴偏离反射器轴,并绕反射器轴旋转,依次来得到当前角误差信息[2]。本文介绍的是旋转副反射面的方法。
天线副反射面后面对称放置四个接近开关,四个接近开关的空间放置位置及顺序如图2所示。
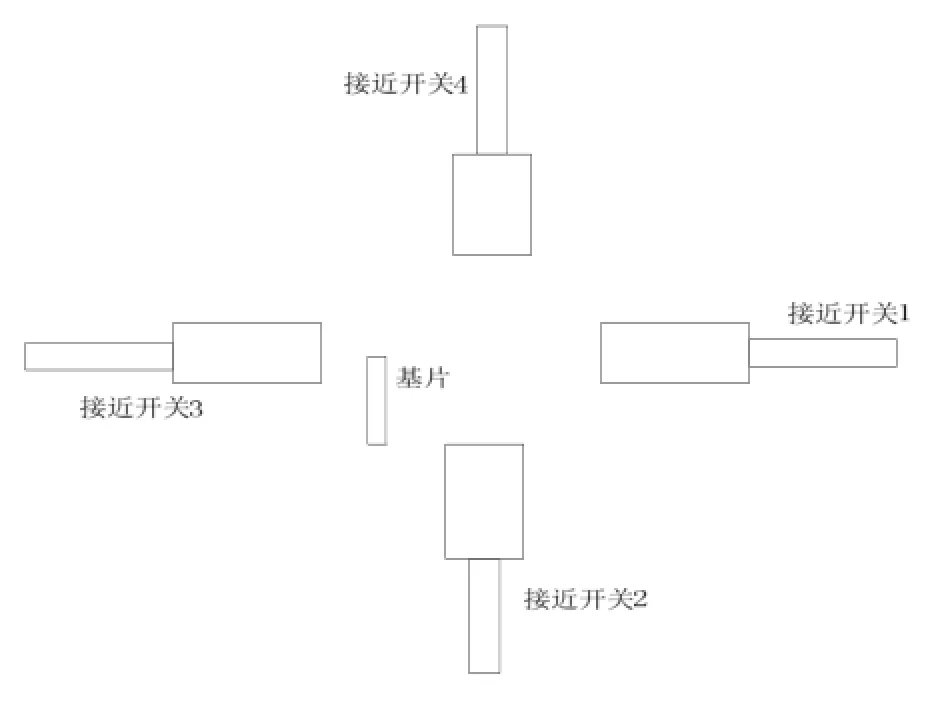
图2 接近开关空间布置图
天线幅反射面由直流电机带动旋转,同时基片也跟着旋转,基片与接近开关距离近时,接近开关上面的灯亮,接近开关里面的三极管导通;当基片离开接近开关对面时,接近开关上面的灯灭,接近开关里面的三极管截止。四个接近开关依次轮流导通与截止。四个接近开关依次导通一圈为一个周期,即为扫描周期。扫描的频率的变化可以控制电机的转速实现。四个接近开关依次轮流导通时序图如图3所示。
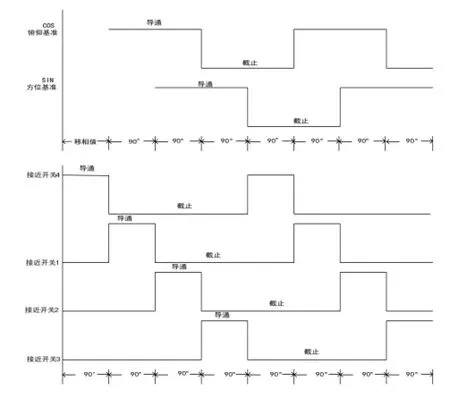
图3 圆锥扫描时序以及基准示意图
3 通过移相调节耦合的原理
圆锥扫描跟踪系统馈源输出的信号包络中含有角误差信息,包络函数相对于波束扫描位置的相位含有方向信息[3]。一对相位检波器利用从单片机送来的参考输入完成角跟踪误差信号的检测。这两个检波器实际上是求点积的器件,他们的正弦波频率是扫描的频率,而相互之间有一定的相位关系,以至于从一个检波器获得俯仰角误差,而从另外的检波器获得方位角误差。在天线对准目标后,以A-E两轴的天线为例来说,当天线方位偏离目标时(在波束范围内),方位误差电压明显增大,俯仰误差电压很小;当天线俯仰轴偏离目标时(在波束范围内),天线方位不动,俯仰误差电压明显增大,方位误差电压很小。这是比较理想的情况,这样天线跟踪比较平稳。如果天线方位偏离目标,俯仰不动,方位误差电压,俯仰误差电压都很大的情况,即方位和俯仰角跟踪误差相互偶合,天线跟踪目标时,天线晃动很厉害,不仅使机械结构磨损厉害,也使天线无法跟踪目标。因此可以通过调节相位,使方位俯仰的误差电压耦合降到最小,这样才能使天线平稳的跟踪目标。
4 移相的实现方法
由于接收机要解调出方位误差电压、俯仰误差电压,需要我们提供基准信号。给接收机的基准的时序可以通过微处理器的IO口输出高低电平实现。方位基准信号与俯仰基准信号相差90°。图3上半部分是提供基准的示意图,可以通过控制提供基准的时间来达到移相得目的。笔者使用的单片机型号为C8051F040,此单片机有5个定时器。在单片机中启用一个定时器,以定时器延时起动进入中断的方法达到移相得目的。如果圆锥扫描频率为5HZ,对应于接近开关依次顺序导通一周为360度,360度对应于200ms。由于接近开关的信号已经送入单片机的IO口,可以采样相邻两个接近开关信号电平,来判断是否扫描频率已经达到5Hz,如果采样频率到达5Hz,可以通过程序实现图3所示的时序图。可以计算定时器第一次延时启动的时间,把这个时间换算成定时器第一次启动的延迟常数,这个实现起来比较简单,具体方法如下;
笔者使用的单片机的时钟频率为22118400,定时50ms的时间常数为22118400/12/5/4;单片机的一个中断对应90°,所以移相一度对应的定时器常数为92160/90=1024;以定时器2为例。
定时器初始化的函数
void Timer2_Init(void)
{
SFRPAGE_SAVE = SFRPAGE;
SFRPAGE = TMR2_PAGE;
TMR2CN= 0x00;
RCAP2H= 0xff & ((-THETA)>>8);
RCAP2L= 0xff & (-THETA);
TMR2H= RCAP2H;
TMR2L= RCAP2L;
SFRPAGE = SFRPAGE_SAVE;
}
其中THETA为要移的相位与1024的乘积。
给接收机送基准是在定时器中断里实现的,实现的程序如下所示。
void TIMER2_INT(void) interrupt 5 using 1
{
SFRPAGE_SAVE=SFRPAGE;
SFRPAGE=TMR2_PAGE;
TF2=0;
if (gc_tmr2run == 0) //第一次进中断
{
RCAP2H= 0xff & ((-TC_3MS)>>8);
RCAP2L= 0xff & (-TC_3MS);
TMR2H= RCAP2H;
TMR2L= RCAP2L;
gc_tmr2run = 1;
}
{
flag2++;
if((flag2 == 1) || (flag2 == 2))COS = 1;elseCOS = 0;
if((flag2 == 2) || (flag2 == 3))SIN = 1;
elseSIN = 0;
if(flag2 == 4) flag2 = 0;
}
SFRPAGE=SFRPAGE_SAVE;
}
其中SIN为方位基准信号,COS为俯仰基准信号。这两个信号是送给接收机的。把方位误差电压和俯仰误差电压用示波器显示出来,通过改变THETA值,即通过改变定时器第一次进入中断的时间常数达到移相得目的,耦合大小可以在示波器上面显示出来。通过移相值把接收机输出的误差电压交叉耦合调整到最小,这样天线在跟踪目标时,运动比较平稳,也不会丢失目标。
5 结束语
本文讲述的在圆锥扫描跟踪系统中通过移相的方法调节接收机方位误差电压、俯仰误差电压的耦合,可以把交叉耦合调整到一定的范围内。交叉偶合越小,跟踪天线运动越平稳,跟踪精度越高。本文讲述的方法简单,易于用程序实现,并且这种方法在实际项目中成功运用,取得了良好的效果。工程实际运用表明此方法具有一定的推广价值。
[1] 王德存,丁家会,程望东,等.精密跟踪测量雷达技术[M].北京:电子工业出版社,2006:24-27.
[2] 赵来定,胡正飞,曹伟,等.卫星通信圆锥扫描跟踪[J].现代雷达,2006,28(3):76-78.
[3] 王军.雷达手册[M].北京:电子工业出版社,2003.
A method of debugging cross coupling in conical scan system
IN conical scan tracing system, there are some cross coupling of error voltage between azimuth and elevation from receiver. The function of tracing is not good when cross coupling is large. The same time antenna will be damaged quickly. So a method of reducing cross coupling based on moving phase is proposed and builds. The principle and method of conical scan is introduced, and graph of time about conical scan and reference is presented. Finally it formulates principle and method of moving phase through delaying algorithm in single chip.
Satellite communication; conical scan; receiver; phase; cross coupling; tracing
TN821
A
1008-1151(2016)02-0006-02
2016-01-11
王喜明(1978-),男,陕西西安人,中国电子科技集团公司第五十四研究所工程师,从事移动天线伺服控制技术。
