EPS系统中基于磁阻位置传感器的永磁同步电机控制研究
2016-11-10邵文彬王海峰刘洪岩陈无畏
邵文彬,王海峰,刘洪岩,陈无畏
(1.安徽江淮汽车股份有限公司乘用车研究院,安徽 合肥 230601;2.合肥工业大学机械与汽车工程学院,安徽 合肥 230009)
EPS系统中基于磁阻位置传感器的永磁同步电机控制研究
邵文彬1,王海峰1,刘洪岩2,陈无畏2
(1.安徽江淮汽车股份有限公司乘用车研究院,安徽 合肥 230601;
2.合肥工业大学机械与汽车工程学院,安徽 合肥 230009)
∶为了提高EPS系统中转向助力手感,采用转矩输出特性更好的永磁同步电机作为EPS系统的助力电机,采用矢量控制方法控制永磁同步电机转矩的过程中,需实时采集电机转子位置信息,磁阻位置传感器具有高精度、低功率、低成本等优点,文章针对转子位置传感器为磁阻传感器的永磁同步电机的控制进行了研究,包括硬件电路及软件程序,并进行了电机台架试验。
∶永磁同步电机;磁阻;矢量控制
10.16638/j.cnki.1671-7988.2016.09.056
CLC NO.: U463.44+4Document Code: AArticle ID: 1671-7988 (2016)09-161-05
前言
电动助力转向EPS系统具有节约能源、结构紧凑质量轻、便于布置、提高操纵稳定性的优点,而永磁同步电机以其体积小、功率密度大、转矩脉动小及使用寿命长的优点[1],很好的满足了电动助力转向系统的助力电机性能要求,采用矢量控制方法控制永磁同步电机转矩的过程中,需要电机转子位置信息[2],而磁阻位置传感器具有无接触测量角度位置、适合恶劣环境、不受地磁场影响、高精度、低功率、低成本、测量精度不受机械公差影响的优点[3]。本文设计了基于磁阻位置传感器的永磁同步电机控制器的硬件电路及软件程序,并进行了电机台架试验,对电机进行了标定。
1、永磁同步电机矢量控制方法
1.1坐标变换
永磁同步电机在ABC三相坐标系下,其数学模型具有非线性、时变以及强耦合的特点,控制过程非常复杂。在矢量控制中,采取坐标变换的方法,把永磁同步电机中三相呈正弦变化的交流电变换为两相旋转轴系中的直流电,实现永磁同步电机的解耦。但在坐标变换过程中要保证坐标变换前后两个坐标系下的电流所产生的磁场是等效的并且在坐标变换前后输入(输出)电路的瞬时功率不变[4],永磁同步电机数学模型坐标变换包括Clark变换和Park变换。
1.1.1Clark变换
永磁同步电机定子三相电流为电角度相差120°的三相正弦电流,由此建立与之对应的ABC三相静止坐标系,同时建立两相静止坐标系α β坐标系,取α轴与A相绕组轴线A一致,β轴顺着旋转方向超前α轴90°空间电角度。永磁同步电机ABC和α β坐标系如图1所示。
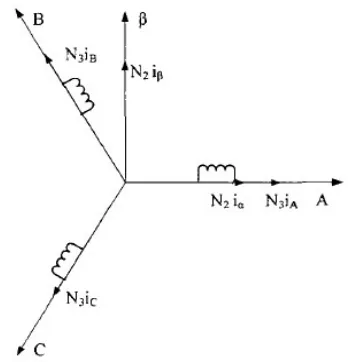
图1 永磁同步电机ABC和α β坐标系Fig1 ABC and α β coordinate system of PMSM
Clark变换式为:

Clark变换实现了定子三相静止轴系ABC到两相静止轴系α β的变换,实现了变量数目的削减。
1.1.2Park变换
定义两相旋转dq坐标系,令d轴与转子磁极轴线重合,q轴逆时针超前d轴90°空间电角度,d轴与A相定子绕组轴线的夹角为θ,dq坐标系随转子以电角速度ωr一起旋转。永磁同步电机α β和dq坐标系如图2所示。

图2 永磁同步电机α β和dq坐标系Fig 2 α β and dq coordinate system of PMSM
Park变换式为:

Park变换实现了两相静止轴系α β到两相旋转轴系dq的变换,从而得到了与转子磁场以相同角速度旋转的旋转坐标系。
1.2永磁同步电机在dq坐标系中的数学模型
永磁同步电机数学模型的坐标变换实现了永磁同步电机的解耦,将永磁同步电机等效成了一台直流电动机,采用此数学模型,研究永磁同步电机转矩及转速输出特性。
在dq坐标系中,永磁同步电机定子直轴磁链为ψd,交轴磁链为ψq,ψf为转子磁链幅值,直轴电流为id,交轴电流为iq,电机极对数为Pn,直轴电感为Ld,交轴电感为Lq,输出电磁转矩为Te,电机粘滞摩擦系数为B,旋转角速度为ωr,负载为TL。

1.2永磁同步电机在dq坐标系中的数学模型
本文所采用的为面装式永磁同步电机,则有Ld=Lq,采用id=0的控制策略对永磁同步电机进行动态控制,即控制电机的转矩角恒为90°电角度,此时,电机输出的电磁转矩与交轴电流呈线性关系,容易实现对电机目标输出转矩的控制,使转矩输出更平稳,并且此种控制方法下,每单位定子电流产生的转矩最大,电机的利用率较高。永磁同步电机矢量控制方法如图3所示。

图3 永磁同步电机矢量控制方法Fig 3 vector controlling method of PMSM
永磁同步电机矢量控制通过以下流程实现:电流传感器检测出永磁同步电机定子三相电流iA、iB和iC后,对三相电流进行Clark变换和Park变换,得到在旋转轴系dq中的电流,作为反馈与EPS控制程序中计算出来的电机目标电流idref和iqref进行PID控制,本文采取id-0控制,故在整个控制过程中令idref-0,通过PID方法计算出的dq轴系中的电机端电压,经过反Park变换后得到α β坐标系中的Uα和Uβ,并以Uα和Uβ作为输入量,采用矢量脉宽调制技术(SVPWM)输出6路包含目标电流信息的占空比信号,驱动三相逆变桥中6个MOSFET,最终控制永磁同步电机的转矩输出。
2、磁阻位置传感器
矢量控制方法实现永磁同步电机转矩控制过程中,需要实时检测电机转子的物理位置,以计算定子磁场与转子磁场的空间电角度,从而进行定子三相电流的解耦,采用磁阻位置传感器采集永磁同步电机转子位置信息。
2.1磁阻芯片KMZ60
恩智浦(NXP)公司生产的各向异性磁阻传感器芯片KMZ60包含了2个惠斯通电桥并对电桥的输出电压信号进行了两级放大。

图4 磁阻芯片工作示意图Fig 4 MR chip working diagram
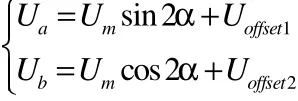
当KMZ60在如图4所示的工作状态时,永磁铁旋转引起磁场变化,第一个电桥会输出与cos2θ成正比的余弦信号,第二个电桥会输出与sin2θ成正比的正弦信号,信号经芯片内部放大偏置处理后,可以表示为:

2.2磁阻传感器的应用
基于磁阻芯片KMZ60的永磁同步电机控制原理图如图5所示:
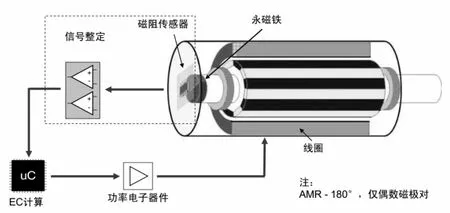
图5 基于磁阻芯片KMZ60的永磁同步电机控制原理图Fig 5the PMSM controlling schematic diagram based on MR chip
电机运转过程中,用磁铁随电机转子转动,从而使永磁铁和磁阻传感器间的磁场发生改变,磁阻传感器输出带有角度信息的信号,信号经处理后被MCU采集,并计算出角度信息,进而通过矢量控制方法实现永磁同步电机的转矩控制。
3、EPS控制器硬件设计
EPS控制器硬件电路作为EPS控制策略的实施载体,电路的设计将直接影响电机的转矩输出特性。EPS控制器整体硬件设计构架如图6所示。

图6 EPS控制器硬件结构Fig 6 EPS controller hardware structure
3.1稳压电路
本文所设计的EPS控制器针对车型车载蓄电池电压为12V,而主控芯片STM32F103ZET6供电电压为3.3V,本文电压转换电路采用Allegro公司生产的汽车级双输出稳压芯片,其输入电压最高可达50V,它包括一个输出5V的固定导通时间的开关式降压稳压器和一个输出3.3V的线性稳压器。基于芯片A4402的电源转换电路如图7所示[5]。

图7 基于芯片A4402的电源转换电路Fig 7 the power transforming circuit based on A4402
3.2最小系统电路
本文EPS系统的驱动电机采用的是永磁同步电机,控制方法采用矢量控制与空间矢量脉宽调制技术,在控制过程中需实时计算定子磁通矢量方向与转子位置,要求单片机具有强大的运算能力;同时EPS系统需接收点火信号、发动机转速信号、车速信号、转子位置信号以及片上各模块电压检测信号等,要求单片机具有丰富的接口来满足信号输入需求。
本文采用的主控芯片是意法半导体公司(ST)生产的STM32系列芯片,具体型号为STM32F103ZET6。STM32F 103ZET6最小系统电路如图8所示。

图8 最小系统电路Fig 8 minimum system circuit
3.2转子位置信号采集电路

图9 转子位置信号采集电路Fig 9 the sampling circuit of motor position signal
永磁同步电机的转子位置采集传感器为以KMZ60磁阻芯片为核心的角度传感器,信号输出为两路相位相差90°幅值为1.4V,偏置为2.5V的两路正弦信号,信号为模拟量,且幅值超过主控芯片ADC采集范围,对信号进行分压后,采用由LMV324构成的电压跟随电路进行阻抗匹配过后,电平信号直接与MCU的AD引脚相连,转子位置信号采集电路如图9所示。
3.3驱动电路
永磁同步电机驱动采用三相逆变桥电路,STM32F103 ZET6引脚输出电平为3.3V,并不能直接驱动MOSFET,故采用以A946为核心的驱动电路实现电压的举升。以A3946为核心的驱动电路如图10所示[6]。
每个A3946芯片可以驱动两路MOSFET,即对应每相电桥的高边与低边。

图10 以A3946为核心的驱动电路Fig 10 the driving circuit based on A3946
4、永磁同步电机驱动软件设计
4.1基于磁阻芯片的转子位置解算
永磁同步电机转子位置传感器采用的是磁阻式角度传感器,在转子旋转一周的过程中,输出两路相位相差90°的正弦信号,而对应转子的不同位置,两路信号为与角度对应的电平。转子位置传感器输出信号电平与对应转子机械角度关系曲线如图11所示。

图11 转子位置传感器信号Fig 11 the motor position sensor signal
传感器输出电平与转子位置机械角度对应关系为:
本文采用具有2对极的永磁同步电机,则永磁同步电机转子电角度θ与机械角度α关系为θ=2α,则有:

主控芯片STM32F103ZET6通过AD模块采集电机转子位置传感器两路模拟信号,并在定时器中断中对永磁同步电机转子位置进行解算。但对于单片机来说,反正切函数运算量相对较大,会占用太多的片上资源,影响整个EPS系统的运行,采用查表法计算反正切函数,可以在很大程度上减少单片机运算负担,同时其计算精度完全满足永磁同步电机矢量控制需求。本文设计了如下转角传感器信号解算流程:
1)建立反正切函数表;
3)判断角度θ所在象限,同时通过查表计算反正切函数:
若X>=0且Y>0则θ位于第一象限

通过上述计算,将所得的电机转子位置角度值赋给全局变量,为矢量脉宽控制过程中Park变换及Park逆变换提供转子位置信息。
4.2永磁同步电机控制程序
永磁同步电机相电流采样完成后,进入ADC中断,在中断处理函数中进行矢量控制和空间矢量脉宽调制控制,永磁同步电机矢量控制流程图如图12所示。
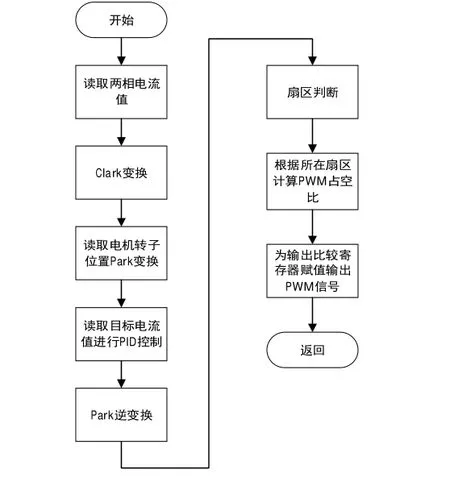
图12 永磁同步电机矢量控制流程图Fig12 vector controlling process chart of PMSM
永磁同步电机矢量控制主程序在ADC中断中,当相电流采集完成进入AD中断后,对采集的相电流进行Clark变换以及Park变换,将变换完成的实际交轴电流与和目标转矩对应的参考交轴电流进行对比,通过PID算法,解算出控制变量,并对其进行反Park变换,得到在α β坐标系中的Uα及Uβ,并通过Uα及Uβ进行扇区判断,并计算出扇区切换时间,最终输出对应占空比的PWM信号对MOSFET的通断进行控制,从而实现对永磁同步电机的转矩输出控制。
5、永磁同步电机转矩标定实验
已经得到了在dq坐标系中电机的电磁输出转矩与解耦后得到的交轴电流iq之间的数学表达式,对于所用EPS助力电机并未得到准确完善的电机参数,同时考虑到电机在实际运转过程中电机内部的摩擦,所以对永磁同步电机进行转矩标定,其在EPS系统中对于更准确的控制电机转矩输出具有现实意义。

图13 电机实验台Fig13 motor testing bench
永磁同步电机标定在如图13所示电机实验台上进行。具体实验过程为在电机控制程序中设置交轴电流参考值iq,编译后烧写至控制器,复位控制器,启动电机,逐渐给磁粉制动器加载,电机转速逐渐降低,控制加载速度保持电机平稳运行,当磁粉制动器的载荷使电机转速突然降低并不能平稳运转时,从转矩传感器显示仪中读取当前转矩值(此值为对应参考Q轴电流值iq的电机输出转矩),改变交轴电流参考值,并重复上述实验过程,测出一系列Q轴电流参考值与电机输出转矩。实验测得Q轴电流与目标转矩数据如表1所示。

表1 电机交轴电流与输出转矩关系Tab1 the testing result of motor Q axis and output torque
实验过程中测量的转矩为电机转速由平稳向转速突然降低时读取的转速平稳区段的转矩,可以消除系统惯量对实验的影响。在读取转矩示数时,电机的转速在700rpm左右或更低,且变化不大,则电机系统摩擦产生的转矩变化很小,电机的输出转矩相对于电机的电磁转矩有一个固定的偏移,在EPS系统中,主要利用电机的输出转矩,故本实验主要标定了电机的输出转矩与交轴电流Iq之间的数量关系。
通过所测数据得到的永磁同步电机输出转矩与Q轴电流关系曲线如图14所示,由曲线可以看出,由于系统摩擦产生的转矩变化很小,电机的输出转矩也同交轴电流iq成线性关系。
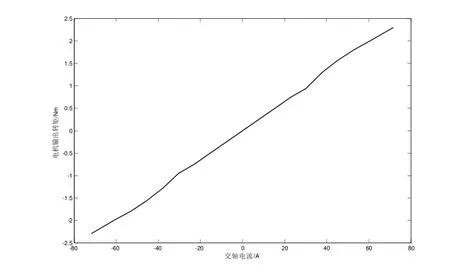
图14 PMSM输出转矩与Q轴电流关系曲线Fig 14 the curve of motor Q axis and output torque
6、结语
本文在分析了EPS系统中永磁同步电机的矢量控制方法,并针对矢量控制中磁阻位置传感器对于转子位置测量进行了研究,并设计了永磁同步电机控制的硬件电路及软件程序,并对永磁同步电机进行了转矩标定。
[1] 朱文勃.基于永磁同步电机的EPS控制器开发 [D] 合肥.合肥工业大学2013.
[2] 龙明贵.永磁同步电机矢量控制分析 [D] 成都.西南交通大学. 2012.
[3] 王超.基于AMR效应的磁阻角度传感器的设计[D] 西安.西北工业大学.2007.
[4] 姚绪梁. 现代交流调速技术[M].哈尔滨:哈尔滨工程大学出版社,2009:112-113.
[5] Allegro Microsystems, Constant On-Time Buck Converter with Integrated Linear Regulator[EB/OL]. http://www.allegromicro.com.
[6] A3946 Half-Bridge Power MOSFET Controller Manual, Allegro, Inc,2006.
Research of control based on PMSM with magnetoresistive rotor position sensor in EPS
Shao Wenbin1, Wang Haifeng1, Liu Hongyan2, Chen Wuwei2
(1.Passenger car institute of Technical Center, Anhui Jianghuai Automobile Company, Anhui Hefei 230601;
2.School of Mechanical and Automotive Engineering, Hefei University of Technology, Anhui Hefei 230009)
Permanent Magnet Synchronous Motor(PMSM) which has better Torque output characteristic is used in Electric power steering system (EPS) in order to get better Power-assisted effect. Rotor position must be got when PMSM is controlled with Field Oriented Control (FOC) method. Magnetoresistive position sensor has the advantage of high accuracy , low cost and low power . This dissertation has a research on the control of PMSM with Magnetoresistive position sensor , motor bench test is taken at the same time.
PMSM Magnetic resistance FOC
∶U463.44+4
∶B
∶1671-7988(2016)09-161-05
邵文彬(1984-),男,硕士研究生,底盘设计工程师,安徽江淮汽车股份有限公司技术中心。
