改进滑模变结构控制光伏系统最大功率点跟踪
2016-11-10颜景斌王飞王美静徐永亮
颜景斌 王飞 王美静 徐永亮

摘要:由光伏电池的光伏特性知,随着光照强度和环境温度的变化,其最大功率点也随之改变,为了能够实时监测跟踪到光伏系统最大功率点,采用一种改进的滑模变结构控制方法进行最大功率点跟踪,该方法在传统滑模变结构控制的滑模面选择基础上加入积分运算,并且把指数趋近律与等效控制相结合,最后,通过仿真可以看出,相比传统的滑模变结构控制,该方法减小了稳态误差,使系统更加稳定,同时,加快了跟踪速度,使跟踪时间缩短了0,025s,
关键词:光伏特性;最大功率点跟踪;滑模变结构控制
DoI:10.15938/j.jhust.2016.04.020
中图分类号:TPl3
文献标志码:A
文章编号:1007-2683(2016)04-0106-06
0引言
随着当今世界人口及经济的增长,人类对能源需求量也日益增大,当今世界煤炭、石油、天然气等不可再生能源不断被消耗,能源与环境问题日益突出,这迫使人类强力寻求可再生新能源,太阳能作为可再生绿色能源之一,以其清洁无污染,取之不尽用之不竭等优点备受人们的重视。
光伏电池作为把太阳能转化为电能的模块,其具有非线性伏安特性,并且光伏电池的性能受外界环境变化影响,特别地受光照强度和温度的影响怎样更好更有效的利用光能成为了研究人员需要解决的一个重要问题也是一个难题,因此,最大功率点跟踪方法被应用到光伏系统中,能够实时监测跟踪光伏电池最大功率输出。
目前最大功率点跟踪方法主要有:干扰观测法,其控制简单,但是跟踪精度低、响应速度慢;电导增量法,其控制精确、响应速度快,但对硬件要求高,导致整个系统硬件造价也高;模糊控制法,其鲁棒性好、系统设计灵活,但是精度不高、易产生振荡现象;人工神经网络法,其控制性能好,但是响应速度慢,尚不成熟,实现较困难,综合上述方法,为了使系统响应速度快、跟踪精度高、稳定性好,并且易于实现,研究采用滑模变结构控制方法,滑模变结构控制是现代控制变结构的一种控制策略,它对于参数的不确定性具有很好的稳定性和鲁棒性,抗干扰能力强,在实际设计中,滑模变结构控制具有较好的灵敏性,并且较于其他非线性控制方法更容易实现,这使得滑模变结构广泛应用于各种非线性控制系统中,文在滑模变结构控制上利用改进的Zeta电路作为变换电路对光伏系统MPPT控制能以较小的超调量对最大功率点进行跟踪,
本文提出了一种改进的滑模变结构控制方法,它在传统滑模变结构控制设计基础上,加入积分模块到切换函数中,并且把指数趋近率和等效控制相结合,减小了系统稳态误差,使系统状态能以较大速度趋近滑动模态,缩短了到达稳定状态的时间,并且有效的抑制了抖振,最后通过实验仿真分析也验证了其优越性,
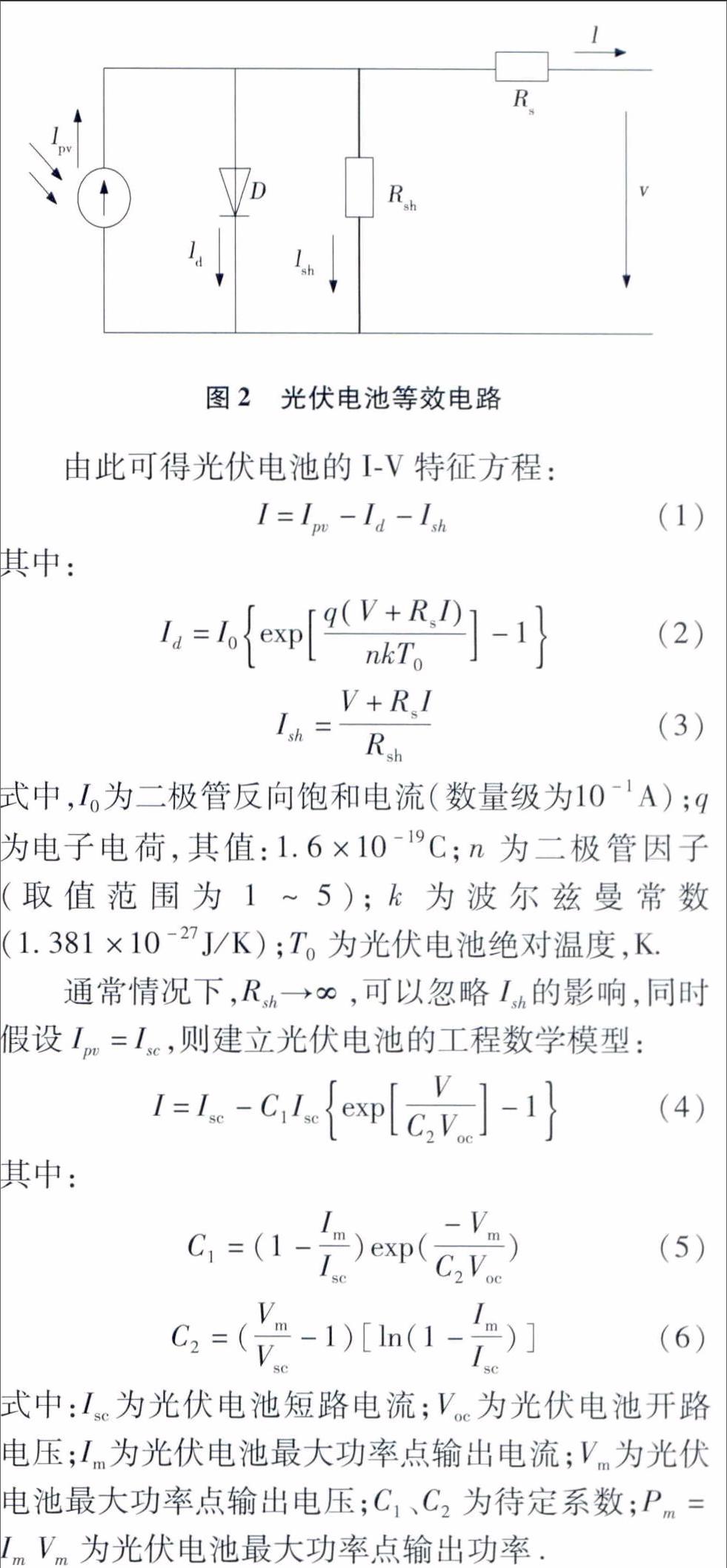
1.光伏电池模块分析
光伏系统结构框图如图l所示,由太阳能电池阵列、DC/DC控制电路、MPPT(最大功率点跟踪控制)和负载组成,
根据式(1)~(6),可得到光伏电池的光伏特性曲线,如图(3)和图(4)所示,电压与输出功率成非线性关系,随着电压的升高,输出功率先增加后递减,存在一个最大输出功率点,最大输出功率Pm随光照强度的增大而大幅度增大,随环境温度的增大而略微减小。
2.基于改进滑模变结构控制的最大功率点跟踪
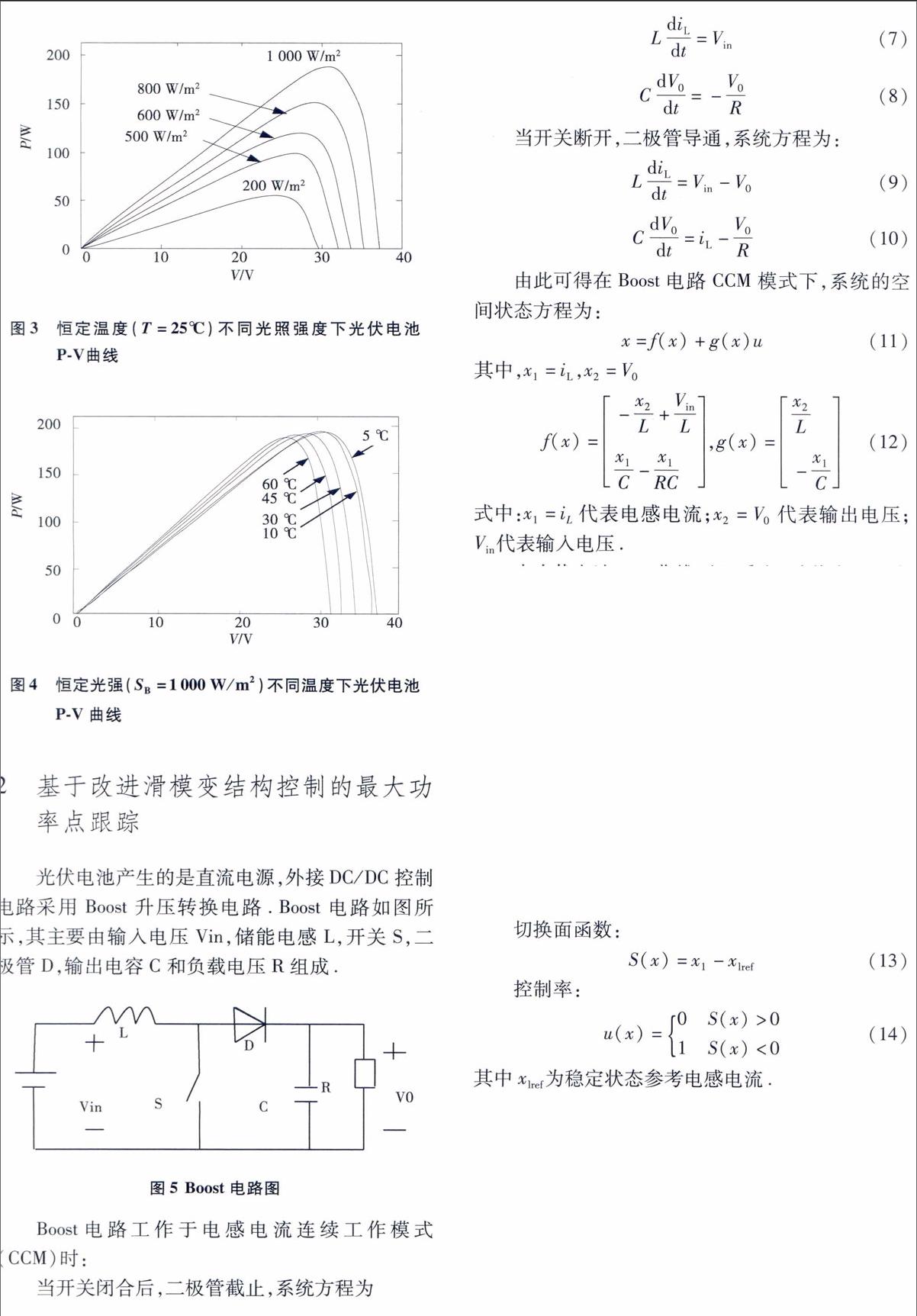
光伏电池产生的是直流电源,外接DC/DC控制电路采用Boost升压转换电路,Boost电路如图所示,其主要由输入电压Vin,储能电感L,开关S,二极管D,输出电容C和负载电压R组成,
Boost电路工作于电感电流连续工作模式(CCM)时:
当开关闭合后,二极管截止,系统方程为
由光伏电池P-V曲线可以看出,随着光照强度和环境温度的变化,输出功率也随之变化,且存在一个最大功率Pm点,此时对应输出电压Vm和输出电流,LPm因此,可通过跟踪光伏电池最大功率点来获得光伏系统对应的输出电压,滑模变结构跟踪控制受系统参数及扰动变化不灵敏,动态响应快,采用滑模变结构跟踪控制能够快速、稳定地搜寻到光伏电池最大功率点,
设计滑模变结构控制器主要在于满足滑模变结构存在条件、到达条件和稳定条件三要素情况下,进行切换面函数S(X)的选择和控制率U(z)的求取,传统的滑模变结构控制器设计如下:
由于控制最终目的是获得光伏电池最大功率点对应的输出电压,一般考虑采用输出电压稳态误差作为切换面函数,但是这样不能存在稳定的滑动模态,甚至不存在滑动模态,因此,采用式(13)这种利用电感电流间接控制输出电压设计方法,使系统保证滑动模态存在,由于实际中,稳定状态时i≠ilief存在稳态电感电流误差,且动态响应较慢,为了跟踪更精确,跟踪速度更快,下面设计一种改进的滑模变结构控制,
为了减小稳态误差,在切换面函数中加入控制状态变量积分项,构建线性滑膜切换面函数:
3.系统仿真及实验分析
基于滑模变结构控制的光伏系统最大功率点联立式(18)和式(19),有:
与传统滑模变结构控制相比较,改进的等效控制实现了电压电流双环控制,使系统控制更稳定,对扰动做出灵敏的反应;切换面函数引入积分运算可以减小稳态误差,使系统控制更精确;采用指数趋近律,可以保证不管初始状态在什么位置,都能在有限时间内快速到达滑模切换面,改进滑模变结构控制的simulink仿真模型如图6所示。
由图8可知,在标况下对比系统输出电压,基于传统滑模变结构控制的系统输出电压和基于改进的滑模变结构控制的系统输出电压都不存在过冲,都能平滑趋近光伏电池最大功率点时刻系统输出的电压值;由图8(a)知,基于传统滑模变结构控制的系统在O.045s到达系统输出的稳定电压值,之后并一直保持着这个稳定值,由图8(b)知,基于改进的滑模变结构控制的系统在O.02s时就已经到达系统输出的稳定电压值,之后也一直保持着这个稳定值;由此可见改进的滑模变结构控制系统比传统的滑模变结构控制系统能够更快的跟踪到光伏电池最大功率点输出,其跟踪时间缩短了0.02s
由图9可知,当环境温度稳定在25%不变时,改变光照强度,系统的输出电压也随之变化,初始时刻的光照强度为1000 W/m2,0.15 s时降为800W/m2,O.3 s时降为600 W/m2
对比图9(a)、(b),基于传统滑模变结构控制的系统在光照强度突然变化时系统输出电压瞬时大幅跌落,然后再慢慢上升趋近于稳定电压输出值;改进后的滑模变结构控制的系统则不出现瞬时大幅跌落情况,而是逐渐趋近于稳定电压输出值;并且改进的滑模变结构控制系统比传统滑模变结构控制系统趋近速度更快更稳定。
由图10可知,当光照强度稳定在1000W/m2不变时,改变环境温度,系统输出电压也随之变化,但是变化幅度不大,初始时刻的温度为25°C0,15s时上升为40%,0.3s时上升为55°C。
对比图10(a)、(b),基于传统滑模变结构控制的系统输出电压受温度影响相对较大,而改进后的滑模变结构控制的系统输出电压受温度影响变化较小,具有更好的鲁棒性。
4.结论
通过实验仿真分析,与传统滑模变结构控制的系统相比较,改进的滑模变结构控制系统在其基础上加入积分环节,把指数趋近律控制和等效控制相结合,有效的调节了趋近滑模面时间,使系统跟踪速度更快,并且还具有更好的稳定性和消抖性,抗干扰能力强,鲁棒性好,此外,该方法不仅适合光伏系统,还适合任何Dc,Dc变换电路,应用范围广。
