面向数据融合的传感器精度自评估方法*
2016-11-07谭秋玥陈世友
谭秋玥 陈世友 刘 颢
(1.河北工业大学 天津 300131)(2.武汉数字工程研究所 武汉 430205)
面向数据融合的传感器精度自评估方法*
谭秋玥1陈世友2刘颢2
(1.河北工业大学天津300131)(2.武汉数字工程研究所武汉430205)
在目标位置真值未知情况下,研究利用多传感器对共同目标测量信息估计各传感器精度的方法,为多源数据融合提供可靠的信息处理依据.论文阐述了多传感器精度自评估的基本原理,给出了一种适用于单平台和多平台多传感器精度自评估的方法,分析了传感器精度参数估计的条件,进行了仿真实验,结果表明,论文提出的传感器精度估计方法是一种无偏估计,随着传感器对目标测量数据的增多,传感器测量精度参数估计的精度会增高.
多传感器; 数据融合; 传感器精度; 自评估
Class NumberTN957
1 引言
传感器的探测精度或航迹精度信息是十分重要的信息。在进行多源数据融合时,很多数据合成算法以目标数据的精度信息为依据确定各传感器目标数据合成的权重[1]。然而,在没有目标真值或更高精度探测值的情况下,传感器难以依据自身探测信息准确评估其探测数据精度。通常,数据融合系统以该传感器标称精度作为其实际探测精度使用。由于受环境等因素影响,传感器实际探测精度往往是变化的,一般不同于其标称精度,尤其是当传感器长期未经校准、传感器机械或电子设备精度严重丧失的情况下[2~3],由于不能准确获知传感器对目标的探测精度,如果在作战系统中存在精度严重丧失的传感器,将使数据融合系统的目标相关正确率和数据融合精度等关键性能受到严重影响[4~5]。
为了解决传感器实际工作精度未知或未确知的问题,一些基于神经网络、模糊推理的数据融合方法相继被提了出来[6~7],但这些方法存在训练数据要求高、计算模型复杂、参数优选依赖经验等问题。基于统计理论,一些作者提出了多传感器数据间的自支持度、互支持度、支持度矩阵和一致性测度等概念和方法[8~9]、传感器信任度方法[10],用于在线确定数据融合的加权系数。本文则基于统计理论及估值方法,在没有目标状态真值或高精度状态信息可供利用的情况下,依靠多传感器对共同目标探测信息的内在冗余性,通过构造观测方程,在线、准实时地估计各传感器的探测精度,具有理论依据明确、计算方法简单等特点。
2 基本原理
假设有三个传感器S1、S2、S3分别对被测量x(k),k=1,2,3…,进行相互独立地测量,分别形成同步测量序列V1={v1(k)}、V2={v2(k)}、V3={v3(k)},其测量误差序列{e1(k)}、{e2(k)}、{e3(k)}均为零均值高斯平稳随机序列,其方差分别为D1、D2、D3。在不掌握被测量x(k)的真值的情况下,应用本文提出的方法,可基于测量值序列V1、V2、V3对三传感器S1、S2、S3的方差进行估计。
由于各传感器相互独立地测量,测量误差序列{e1(k)}、{e2(k)}、{e3(k)}互相线性不相关,则对任意k,有:D[v1(k)-v2(k)]=D{[x(k)+e1(k)]-[x(k)+e2(k)]}=D[e1(k)-e2(k)]
=D[e1(k)]+D[e2(k)]
=D1+D2
(1)
D[v2(k)-v3(k)]=D[v2(k)]+D[v3(k)]
=D2+D3
(2)
D[v1(k)-v3(k)]=D[v1(k)]+D[v3(k)]
=D1+D3
(3)


则式(1)~(3)可用矩阵形式表示成:
AX=B+C
(4)
令向量
(5)

=D1+D2

=A-1E(B)+A-1E(C)
=E[A-1(B+C)]
=E(X)=X

当测量误差序列{e1(k)}、{e2(k)}、{e3(k)}均为白噪声时,有:
cov(B,B)=
又由于cov(C,C)=cov(B,B)则
=E[(A-1C)(A-1C)T]
=A-1cov(C,C)(A-1)T
=A-1cov(B,B)(A-1)T
则有:

(6)
当传感器个数为4时:

可见,在不掌握被测量的真值的情况下,可基于三个(或以上)传感器的测量序列对各传感器的测量方差进行估计;在传感器探测精度相当的情况下,传感器个数越多,其估计越精确;另外,一个传感器的测量精度除了影响本传感器测量方差估计精度外,还会影响其它传感器测量方差估计精度;当某一传感器测量精度极差时,宜采取分步估计的策略,在完成该传感器测量方差估计后,排除该传感器、仅以剩余传感器的测量信息完成其余各传感器测量方差的估计。
3 传感器精度估计方法
根据上述基本原理,传感器精度估计可分解为三个关键过程:观测方程的构造、观测量的估计、传感器探测精度的计算。
· 观测方程构造:由于各传感器的输出均由目标状态的真值与误差两部分组成,通过多个传感器对共同目标的探测数据进行组合、变换,可以得到包含各对应传感器探测精度的观测方程。
· 观测量估计:通过收集多传感器在一定时间区间内对共同目标的探测数据,将数据进行时-空对准等预处理后,对应于观测方程的构造方法,生成观测量的时间序列,并得到观测量的估计值。
· 传感器探测精度计算:根据观测量的估计值、观测方程,利用线性方程组的求解算法或用最小二乘等对超定方程组的数值解法,计算出各个传感器的探测精度。
3.1观测方程构造
1)选择坐标系
不同的传感器输出目标状态信息时,它所采用的坐标系一般是不同的,尤其是当这些传感器分别安装在不同的平台或位置时。因此,在多源信息处理过程中,需要首先将目标状态数据转换到同一个坐标系下。
可选择任一传感器坐标系、指定参考点地理坐标系、地心坐标系或其他坐标系作为基准坐标系。在单平台情况下,建议选择传感器坐标系作为基准,可简化信息处理过程和计算量。
令Ci(j,t)为第i个传感器(简称传感器i)在t时刻对第j个目标(简称目标j)的探测值从传感器i的测量坐标系转换到基准坐标系的坐标转换矩阵。该矩阵可利用传感器的位置信息及传感器对目标的探测值近似求得。当不强调时间t时,将(j,t)简写为(j),例如,将Ci(j,t)简写为Ci(j);同样的,对于时间序列z(tk),也会将其简写为z(k)或z,其中,tk表示第k个探测时刻。
2)构造观测方程式
如图2所示,令V(j)、Ri(j)、Ii、Wi分别表示目标j的位置矢量、目标j相对传感器i的位置矢量、传感器i的安装位置矢量、传感器i的承载平台位置矢量,则有:
V(j)=Ri(j)+Ii+Wi,i=1,2,3…

图1 位置矢量之间的关系
令ypq(j)表示第p(p=1,2,3…)个传感器和第q(q=1,2,3…)个传感器对共同目标j(j=1,2,3…)的探测值之差。令eRi、eIi、eWi分别表示第i个传感器的测量误差、安装位置测量误差和平台定位误差。通常,传感器安装位置是可以精确测量的,平台定位误差eWi远小于传感器的测量误差eRi,为简化处理,在评估传感器探测精度时可以不考虑平台定位误差eWi和传感器安装位置误差eIi的影响。则有:
ypq(j)=Cp(j)·eRp(j)-Cq(j)·eRq(j)
忽略不同传感器测量误差之间的线性相关性,则可构造方程:
cov[ypq(j)]=cov[Cp(j)·eRp(j)-Cq(j)·eRq(j)]
=cov[Cp(j)·eRp(j)]
+cov[Cq(j)·eRq(j)]
=Cp(j)·cov[eRp(j)]·Cp(j)T
+Cq(j)·cov[eRq(j)]·Cq(j)T
(7)
其中,Cp(j)、Cq(j)分别为传感器p、q对目标j的传感器坐标系到基准坐标系的坐标转换矩阵。当目标和平台的相对运动速度较小时,在较小的时间区间内,由于目标相对平台的位置关系变化不大,可以将ypq(j)、eRp(j)、eRq(j)看成是时间平稳的随机序列。因此,cov[ypq(j)]可以利用传感器p、传感器q对目标j在较小时间区间内的测量信息近似计算得到,可以将Cp(j)、Cq(j)、cov[eRp(j)]、cov[eRp(j)]近似看作常矩阵,同样可以基于传感器p、传感器q对目标j的测量信息计算得到。其中,
其中,D(rp)、D(bp)、D(ep)分别为传感器p在距离、方位和仰角的测量方差,在这里,它们被看作待估计量(传感器p各轴向探测精度),rp为目标j相对传感器p的斜距,D(rq)、D(bq)、D(eq)和rq分别为传感器q在距离、方位和仰角的测量方差和目标j相对传感器q的斜距。
将式(7)等式两边均写成多项式矩阵形式,则等式两边对应元素则可构成一个观测方程,其中,左式为协方差阵cov[ypq(j)]的一个元素,看作是观测量,而其右式则是包含待若干估计量的线性组合。基于矩阵的上三角(或下三角)矩阵的所有元素则可构成(M+1)·M/2个观测方程,并容易转换成形如式(4)的矩阵形式的观测方程。其中,M为传感器的测量维数。
当多个传感器同处在一个承载平台时,为简化处理,可指定任一传感器p的测量坐标系为基准坐标系,此时,Cp(j)=I、Cq(j)≈I,cov[ypq(j)]的非对角元素均近似为零,基于式(7)仅能构成形如式(1)的M个观测方程。这里,I为单位矩阵。
类似地,可以基于其他传感器、目标、测量时间片段的测量数据构造更多的形如式(7)的方程,据此可以扩展观测方程的行数。
3.2观测量估计
在规定长度的时间区间内,同时收集各传感器对共同目标的探测数据,并对探测数据进行时间对准,对于所有传感器进行两两组合,分别计算它们对共同目标的测量值之差,利用方差或协方差的数值计算方法,完成对cov(ypq(j))的估计。
1)观测序列的时间对准
以tk表示第k次测量的时刻或航迹更新时刻,ta表示需要对准的时刻,其中tk>ta>tk-1,时间对准可以采用函数内插方法:

·(tk-ta)
Ri(j,tk)为目标j相对传感器i在时刻tk的位置矢量。
可采用同样的方法,对平台的位置信息进行时间对准。
2)观测量的估计方法
观测变量cov(ypq(j))的估计值应用矢量序列的协方差计算方法。

3.3传感器探测精度计算
根据观测方程的维数,选择式(5)或式(6)计算各待估计量,便得到各传感器各轴向探测精度的估计值。
3.4精度估计的条件分析

对于多平台多传感器精度估计问题,若传感器的个数为2,基于传感器组合对一个共同测量目标的测量序列,能构成(M+1)·M/2个观测方程,小于待估计量个数2M。若增加共同测量目标的个数,对于不同目标,由于它们相对传感器的位置(关键是方位)不同,会使得Cp(j)、Cq(j)不同,从而能够增加式(4)中矩阵A的秩。因此,在多平台情况下,即便只有两个传感器,如果相对传感器在不同的方向上存在多个目标,也能够估计出传感器的工作精度。
4 仿真实验
4.1单平台多传感器探测精度评估
在单平台配置的三部雷达,其距离探测的标准差分别为100m、50m、50m,方位探测的标准差分别为0.3°、0.3°、0.25°,在共同探测区域内,有两个目标。共进行了500次的传感器精度评估仿真实验,每次仿真实验中使用了二个共同目标的100个周期的探测数据。图2显示的是500次仿真实验中传感器1的方位标准差的估计值的统计图,其中,曲线为按正态分布拟合出的曲线。
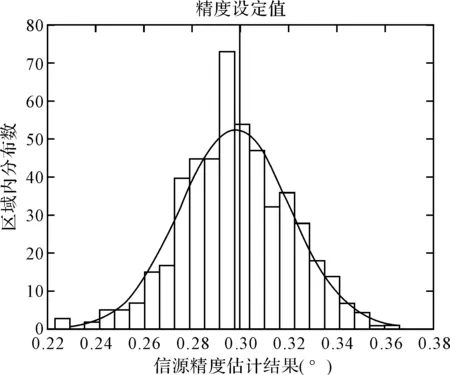
图2 传感器1的方位标准差的估计值的统计图
4.2多平台多传感器探测精度评估
在两个平台上分别配置一部雷达,雷达位置分别位于(-21,21)、(21, -21)处,单位为公里,其距离探测的标准差分别为100m、85m,方位探测的标准差分别为0.35°、0.3°。在共同探测区域内,有5个目标,分别位于(0, 60) 、(20, 40)、(60, 60) 、(40, 20)、(60, 0),单位为公里。共进行了500次的传感器精度评估仿真实验,每次仿真实验中使用了5个共同目标的100个周期的探测数据,图3显示的是500次仿真实验中传感器2的方位标准差的估计值的统计图,其中,曲线为按正态分布拟合出的曲线。

图3 传感器2的方位标准差的估计值的统计图
可见,无论是在单平台还是在多平台情况下,传感器探测精度是可以估计的,其估计值是随机变化的,可看作是零均值、正态分布的随机变量。
5 结语
在多源数据融合系统中,能够在目标位置的真值未知的情况下,利用多传感器对共同目标测量信息的冗余性,通过构造观测方程,能够估计出传感器的工作精度。其中,对于单平台多传感器,至少需要三个传感器对共同目标的测量数据,才能进行多传感器精度估计;对于多平台多传感器,如果相对传感器在不同的方向上存在多个目标,在只有两个传感器的情况下,也能够估计出多传感器的精度。传感器精度的估计值的精度,在单平台情况下,主要受传感器对目标测量数据的数量、传感器测量精度的影响;在多平台情况下,还受目标空间分布的影响。本文给出的传感器精度的估计方法是一种无偏估计,传感器对目标测量数据的数量越大,传感器精度的估计值的精度就越高。
[1] 何友,王国宏.多传感器信息融合及应用(第二版)[M].北京:电子工业出版社,2007:251-275.
HE You, WANG Guohong. Multi-Sensor Information Fusion with Applications(2nd Edition)[M]. Beijing: Publishing House of Electronics Industry,2007:251-275.
[2] Y. Bar-Shalom, H. Chen. Multi-sensor Track-to-track Association for Tracks with Dependent Errors[C]//43th IEEE Conference on Decision and Control, Paradise Island, Bahamsas,2004:2674-2679.
[3] Quan Wei, Fang Jiancheng, Xu Fan. Hybrid Simulation System study of SINS/CNS Integrated Navigation[J]. IEEE Transactions on Aerospace and Electronic Systmes Magazine,2008,23(2):17-24.
[4] D. L. Hall, J. Llinas. Handbook of Multisensor Data Fusion, CRC Press LLC, Boca Raton,2001:658-659.
[5] K. G. Klir. Uncertainty and Information: Foundations of Generalized Information Theory[M]. John Wiley & Sons, Inc., Hoboken,2006:26-100.
[6] 蔺杰.数据融合的神经计算方法[D].杭州:浙江大学博士学位论文,2005.
LIN Jie. Data Fusion Based on Neural Computing[D]. Hangzhou: Submitted to the Zhejiang University for the Degree of Doctor of Philosophy,2005.
[7] 陈卫东.基于宽带多传感器系统的目标精确定位与跟踪[D].合肥:中国科技大学博士学位论文,2005.
CHEN Weidong. Wide-band Multi-sensor Based Accurate Localization and Tracking for Target[D]. Hefei: Submitted to the University of Science and Technology of China for the Degree of Doctor of Philosophy,2005.
[8] 司刚全,张寅松,娄勇.考虑自支持度和互支持度的多传感器一致性测度算子[J].西安交通大学学报,2012,46(10):20-23.
SI Gangquan, Zhang Yinsong, Lou Yong. Measuring Operator Considering Self-Support and Mutual-Support for Estimating Consistency of Multi-Sensor Observations[J]. Journal of Xi’An Jiaotong University,2012,46(10):20-23.
[9] 马慧萍,王永海,张伟等.一种实时目标跟踪航迹数据融合算法[J].计算机仿真,2010,27(11):44-47.
MA Huiping, Wang Yonghai, Zhang wei, et al. A Realtime Target Tracking Line Data Fusion Algorithm[J]. Computer Simulation,2010,27(11):44-47.
[10] 焦竹青,熊伟丽,张林等.基于信任度的多传感器数据融合及其应用[J].东南大学学报(自然科学版),2008,38(S1):253-257.
JIAO Zhuqing, Xiong Weili,Zhang Lin,et al.Multi-sensor Data Fusion Method Based on Belief Degree and Its Applications[J].Journal of Southeast University(Natural Science Edition),2008,38(S1):253-257.
A Sensor Precision Evaluation Method for Data Fusion System
TAN Qiuyue1CHEN Shiyou2LIU Hao2
(1. Hebei University of Technology, Tianjin300131)(2. Wuhan Digital Engineering Institute, Wuhan430205)
With the use of measuring datum of common targets, a sensor precision evaluation method for data fusion system was put forward to meet the conditions under which the true value of targets’ states is unknown. The principles and data process procedure for sensor precision evaluation was described in detail. The ability of parameter evaluation of sensor precision was analyzed and the computer simulations were made. All the results showed that the proposed evaluation method is feasible, the evaluated results are unbiased, and the precision of the evaluated results can be improved by accumulating more measuring datum of the common targets from sensors.
multi-sensor, data fusion, sensor precision, self-evaluation
2016年4月6日,
2016年5月12日
谭秋玥,女,研究方向:信号处理、信号与信息工程、电子通信、数字图像处理、自动控制、微机技术。
TN957
10.3969/j.issn.1672-9722.2016.10.012
