水下滑翔机海上试验研究
2016-10-25刘同木陈鲁愚
刘同木,陈鲁愚
(1.国家海洋局南海调查技术中心,广东 广州 510310;2.中国船舶科学研究中心,江苏 无锡 214082)
水下滑翔机海上试验研究
刘同木1,陈鲁愚2
(1.国家海洋局南海调查技术中心,广东广州510310;2.中国船舶科学研究中心,江苏无锡214082)
介绍了水下滑翔机工程样机"海翔1"号2015年在南海的海上试验情况,包括试验对象、试验海区、试验步骤和试验数据分析等。本次试验最大下潜深度达到503.7 m,最大垂直速度为0.15 m/s,最大水平航速为0.33 m/s,水中航行里程总计41.2 km。在4级海况下完成了通信定位、数据传输、布放与回收作业,搭载了CTD、叶绿素和溶解氧浓度传感器进行海洋环境参数测量,获得了500 m深度剖面内的温度、电导率、叶绿素浓度和溶解氧浓度参数信息。本次海上试验为水下滑翔机产品设计定型和示范应用奠定基础。
水下滑翔机;无人水下航行器;海上试验
水下滑翔机是一种靠剩余浮力驱动、可搭载多种海洋监测传感器的新型水下无人观测平台[1]。它可搭载CTD传感器,实现对温度、盐度、深度等海洋动力环境的长期实时监测,为物理海洋及海洋气象、化学、生物等海洋学科研究提供关键基础数据;可携带氧浓度传感器等化学要素传感器对海洋生态环境进行有效监测,为海洋生态保护及治理提供有力支持;也可携带叶绿素传感器,通过对海水中浮游植物的参数监测,为海水养殖及远海渔业开发提供技术支撑。
由于水下滑翔机具有制造成本低、作业效率高、续航能力强、自主可控等特点,近年来在国内外受到了极大的关注。国外水下滑翔机技术已经相对成熟,美国等发达国家已基本实现产品化,如美国的Seaglider、Slocum、Spray,法国ACSA公司的SeaExplorer等[2-5]。国内水下滑翔机的研究刚刚起步,还没有形成成熟产品,目前还处于工程样机试验验证阶段[6-11]。国内从事水下滑翔机的科研单位主要有中船舶重工第七〇二研究所、国家海洋技术中心、中国科学院自动化所、天津大学、中国海洋大学和华中科技大学等涉海科研院所。
海上试验是海洋仪器实现产品化,投入实际应用前最关键的阶段[12-13]。2015年6月5日至6月19日,中船重工第七〇二研究所、国家海洋局南海调查技术中心等单位共同承担的海洋公益性专项“水下滑翔器产品开发与应用示范”在南海进行了海上试验(图1)。本文介绍了此次海试的试验对象、试验海区、试验过程及试验数据分析,为水下滑翔机产品设计定型和示范应用奠定基础。

图1 “海翔1”水下滑翔机海上试验
1 试验对象
本次试验对象为中船重工第七〇二研究所水下滑翔机工程样机“海翔1号”。水下滑翔机耐压壳体和尾部非耐压舱采用铝合金制成,首部非耐压舱采用玻璃钢和铝合金混合结构,水平翼采用ABS材料加工制作,抛载尾翼由钢制成,载体进行了阳极化合防腐处理。水下滑翔机主要系统设备包括:剩余浮力驱动系统、航行控制系统、姿态调节系统、导航系统、水面通讯定位系统、电源与配电系统、应急安全系统、作业传感器组件等。“海翔1号”水下滑翔机外形如图2所示,主尺度及主要参数见表1。

图2 “海翔1”水下滑翔机

表1 水下滑翔机主尺度及主要参数
2 试验海区
水下滑翔机海上试验海区为112°E,18°N附近海域,水深约为2 000 m,试验期间风力不大于8 m/s,浪级不超过4级,海区0~100 m以内的流速小于0.5 kn,表层海水密度1 020.64~1 021.16 kg/m3,表层水温29.9~31.4℃,周围5 km内目测无渔网或其它设施,符合试验条件。
3 试验步骤
(1)各系统设备启动,检查剩余浮力驱动系统、纵横倾调节装置、航控系统、通讯定位系统、应急抛载系统和测试传感器等是否工作测试正常;
(2)解除应急抛载装置锁定,设定水下滑翔机超过540 m深度时应急抛载系统动作;
(3)根据海试大纲要求,进行下水前的安全检查和功能复核;
(4)通过自夹式吊放装置将水下滑翔机布放下水;
(5)母船上信息处理系统通过铱星通讯对水下滑翔机设定目标航向角、滑翔周期、进水/排水深度等参数,接收水下滑翔机的GPS定位坐标;
(6)水下滑翔机在水面接收到指令后,剩余浮力驱动系统进行进水动作,减小水下滑翔机排水体积,使其受到的重力大于浮力,水下滑翔机开始下潜;
(7)根据设定参数,在设定排水深度处水下滑翔机剩余浮力驱动系统进行排水动作,增大水下滑翔机排水体积,使其受到的重力小于浮力,水下滑翔机开始上浮;
(8)若为单周期滑翔试验,水下滑翔机在周期结束后浮出水面进行定位与通讯;若为连续多周期滑翔试验,则在设定进水深度处进行继续下潜,待设定滑翔周期结束后滑翔机浮出水面进行定位与通讯;
(9)母船上信息处理系统与滑翔机进行通讯,接收水下滑翔机GPS定位坐标;
(10)海试总指挥对水下滑翔机工作状态进行判别,发送回收或继续进行下一步试验的指令;
(11)试验结束后,水下滑翔机浮出水面,等待进行回收操作;
(12)回收水下滑翔机;
(13)从水下滑翔机下载数据,检查试验记录数据;
(14)关闭电源,按照规程维护保养。
试验时,使用水下滑翔机航控系统记测水下滑翔机深度、纵倾角、横倾角、艏向角、海水温度、盐度、叶绿素或氧浓度(选装)等参数随时间变化情况;使用GPS测量水下滑翔机在水面通信定位状态时的经纬度坐标;使用海流计记录试验时的海流速度和方向,使用CTD记录试验时的海水密度以及温、盐、深数据。回收后使用电压表测量滑翔机内12 V/24 V电量使用情况。
通过试验数据分析,可得到滑翔上浮/下潜纵倾角、滑翔距离、滑翔速度、水面通讯定位纵倾角等参数。
4 海试结果及分析
4.1水下滑翔机航行性能分析
4.1.1下潜深度当水下滑翔机控制系统检测到传感器达到设定压力,即开始控制上浮,水下滑翔机海上试验第5航次所达到的最大下潜深度为503.7 m,下潜深度曲线见图3。

图3 水下滑翔机下潜深度曲线
4.1.2纵倾角在进行滑翔运动及水面数据通讯时,水下滑翔机会形成一定的纵倾角,纵倾角直接影响航行速度和通讯成功与否。纵倾角定义为:从水下滑翔机尾部向头部看,头部向上纵倾角为正,头部向下纵倾角则为负。
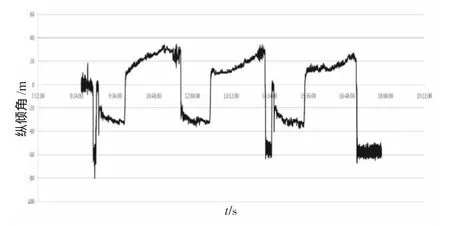
图4 水下滑翔机下潜过程中纵倾角变化曲线
4.1.3航行速度水下滑翔机航行速度分为水平前进速度、潜浮速度和滑翔速度,其中滑翔速度为水平前进速度和潜浮速度的合量。水平前进速度采用GPS卫星定位起止点之间的距离除以其航行时间得到,由于卫星定位显示的是直线距离,并不能完全反映滑翔机在水平方向上的航行里程,因此得到的是水下滑翔机的最小平均水平前进速度;潜浮速度取水下滑翔机的下潜上浮速度两个量的均值;根据矢量合成定理,潜浮速度为滑翔速度垂直方向上的分量,因此滑翔速度可以通过潜浮速度和平均纵倾角来得到。无因次滑翔距离为水下滑翔机单次水平滑翔距离与其下潜深度的比值。水下滑翔机海试采用的剩余浮力调节量为±0.6L,最大剩余浮力调节量为±0.8L。
在工作深度和功能考核试验过程中,水下滑翔机平均垂直速度为0.12 m/s,最大垂直速度为0.15 m/s,最小垂直速度为0.11 m/s;平均水平航速为0.15 m/s,最大水平航速为0.33 m/s,最小水平航速为0.03 m/s;平均稳定滑翔速度为0.34 m/s,最大稳定滑翔速度0.43 m/s,最小稳定滑翔速度0.28 m/s;平均无因次滑翔距离为2.61,最大无因次滑翔距离为6.3,最小无因次滑翔距离为0.5。
4.2海洋环境测量数据分析
水下滑翔机海上试验搭载了CTD、叶绿素和溶解氧浓度传感器进行海洋环境参数测量,采用的传感器技术参数见表2,获得了500 m深度剖面内的温度、电导率、叶绿素浓度和溶解氧浓度参数信息,并可进一步获得盐度和密度数据。本节选取第5航次的测量数据,对AUG-5海试区域的海洋环境信息进行初步分析。

表2 水下滑翔机主要观测仪器设备
4.2.1温度深度剖面试验海区的温度深度剖面随测量时间、测量区域等发生变化,例如,日间由于阳光照射原因,海洋表面至水下深度30 m处温度变化一般为1~2℃,夜间海洋表面至水下深度40 m处的温度变化一般为3~4℃。图5为水下滑翔机采集到的典型温度深度剖面(第5航次第1航段第一周期下潜剖面,时间:6月12日9:04~9:55),图中显示在该时间段AUG-5试验区域0~水下40 m基本没有变化,水下40 m~水下75 m温度由29℃变化到了22℃。

图5 试验海区典型温度深度剖面
4.2.2海水电导率水下滑翔机第5航次采集到的电导率变化曲线见图6,电导率随深度的增加而下降,基本上同温度的变化趋势相当,水下滑翔机下潜过程中,所测得的电导率从海水表面的59.73 ms/cm降到33.01 ms/cm(水下503.7 m处)。

图6 试验海区电导率变化曲线
4.2.3叶绿素和溶解氧浓度水下滑翔机第5航次采集到的叶绿素和溶解氧浓度变化曲线见图7和图8,基本的变化趋势是:叶绿素浓度随深度的增加而增加,溶解氧浓度随深度的增加而减小。
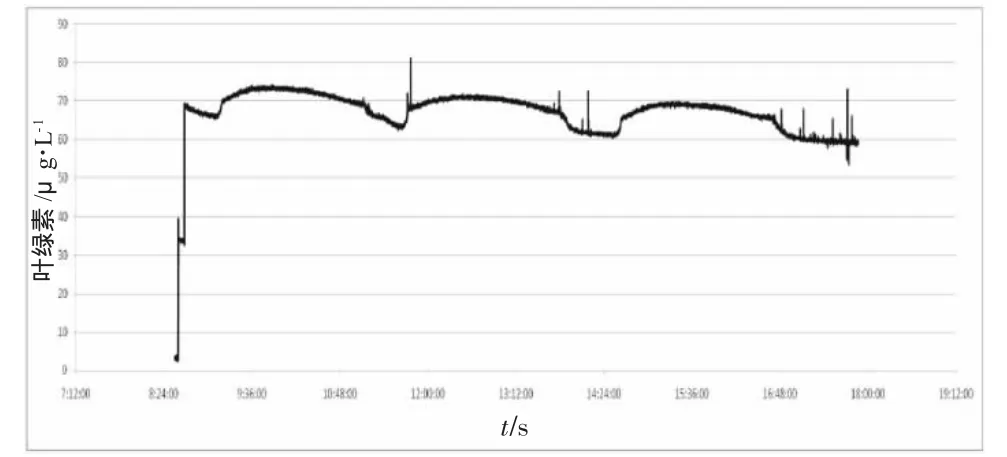
图7 试验海区叶绿素变化曲线

图8 试验海区氧浓度变化曲线
5 结论
本次海上试验水下滑翔机最大工作深度达到503.7 m,在4级海况下完成了通信定位、数据传输、布放与回收作业,水中航行里程总计41.2 km,单个航次连续不间断运行60.5 h(进行36个300 m级剖面测量),共获得各个海洋深度剖面测量数据76个(其中300 m以上深度剖面测量数据71个),总计周期数为234个。水下滑翔机第二次海上试验搭载了CTD、叶绿素和溶解氧浓度传感器进行海洋环境参数测量,获得了500 m深度剖面内的温度、电导率、叶绿素浓度和溶解氧浓度参数信息,并可进一步获得盐度和密度数据。本次海上试验对水下滑翔机样机系统和设备在海洋环境下的功能进行测试,检验水下滑翔机样机在海洋环境下的作业功能和综合性能;为海洋环境水下滑翔机设计定型及海上应用示范奠定了基础。
[1]庞重光,连喜虎,俞建成.水下滑翔机的海洋应用[J].海洋科学,2014,38(4):96-100
[2]MilesT,SerokaG,KohutJ,etal.GliderObservationsand ModelingofSedimentTransportin HurricaneSandy[J].JournalofGeophysical Research Oceans,2015,120(3):1-21.
[3]Miles Travis,Lee Sang Hoon,Wåhlin Anna,et al.Glider Observations of the Dotson Ice Shelf Outflow[J].Deep Sea Research Part II Topical Studies in Oceanography,2016,123:16-29.
[4]Zaba,Katherine D,Rudnick,Daniel L.The 2014-2015 Warming Anomaly in the Southern California Current System Observed by Underwater Gliders[J].Geophysical Research Letters,2016,43(3):1241-1248.
[5]J Sherman,R E Davis,WB Owens,et al.The AutonomousUnderwater Glider“Spray”[J].IEEE Journal ofOceanic Engineering,26(4):437-446,2001.
[6]杨燕,孙秀军,王延辉.浅海型水下滑翔机技术研究现状分析[J].海洋技术学报,2015,34(4):7-14.
[7]程雪梅.水下滑翔机研究进展及关键技术[J].鱼雷技术,2009,17(6):1-6.
[8]温浩然,魏纳新,刘飞.水下滑翔机的研究现状与面临的挑战[J].船舶工程,2015,39(1):1-6.
[9]马冬梅,马峥,张华,等.水下滑翔机水动力性能分析及滑翔姿态优化研究[J].水动力学研究与进展,2007,22(6):703-708.
[10]李志伟,崔维成.水下滑翔机水动力外形研究综述[J].船舶力学,2012,16(7):829-837.
[11]王树新,刘方,邵帅,等.混合驱动水下滑翔机动力学建模与海试研究[J].机械工程学报,2014,50(2):19-27.
[12]崔维成,刘峰,胡震,等.蛟龙号载人潜水器的7000米级海上试验[J].船舶力学,2012,16(10):1131-1143.
[13]崔维成,刘峰,胡震,等.蛟龙号载人潜水器的5000米级海上试验[J].中国造船,2012,52(3):1-14.
Research on the Sea Trial for Underwater Gliders
LIU Tong-mu1,CHEN Lu-yu2
1.South China Sea Marine Survey and Technology Center of State Oceanic Administration,Guangzhou 510310,Guangdong Province,China;
2.China Ship Scientific Research Center,Wuxi 214082,Jiangsu Province,China
The sea trials for the underwater glider prototype"Sea flight 1"in 2015 in the South China Sea are introduced,including the testing object,testing area,testing procedure and testing data analysis.In this sea trial,the maximum dive depth is 503.7 m,maximum vertical velocity is 0.15 m/s,maximum horizontal speed is 0.33 m/s,and its total course in the water is 41.2 km.Under the class 4 sea state,communication positioning,as well as data transmission,distribution and recovery operation of the underwater glider is completed,which is equipped with CTD,and chlorophyll and dissolved oxygen concentration sensors for marine environment measurement,obtaining parameters of temperature,conductivity,chlorophyll concentration and dissolved oxygen concentration in the 500 m depth profile.This sea trial lays the foundation for the design,demonstration and application of underwater glider products.
underwater glider;unmanned underwater vehicle(UUV);sea trials
U674.941;P715.5
A
1003-2029(2016)04-0006-05
10.3969/j.issn.1003-2029.2016.04.002
2016-05-29
海洋公益性行业科研专项经费资助项目(201205035)
刘同木(1980-),男,硕士,工程师,主要研究方向为海洋离岸观测技术。E-mail:liutongmu@smst.gz.cn
