多波束测深误差源对测点位置归算影响研究
2016-10-25张志伟暴景阳肖付民
张志伟,暴景阳,肖付民
(海军大连舰艇学院 海洋测绘系,辽宁 大连 116018)
多波束测深误差源对测点位置归算影响研究
张志伟,暴景阳,肖付民
(海军大连舰艇学院海洋测绘系,辽宁大连116018)
针对Rob Hare提出的多波束测点位置归算精度估计模型的不足,建立了顾及各项改正数之间相关性的改进模型。在多波束测点位置归算模型的基础上,分析了影响测点位置归算的各项误差来源,推导了各误差源对测点位置归算精度估计的影响量,结合算例,分别利用两种模型计算了各误差源对测点位置归算精度的影响量级,绘制了各误差源的误差曲线图与总位置误差曲线图,通过对计算结果的分析比较,得出了两种模型在评估多波束测点位置归算精度时存在的差异,由于顾及到改正数间的相关性,认为改进模型更加科学合理。
多波束测深系统;位置归算;精度估计;改进模型;误差曲线
由于多波束测深系统具有全覆盖、高精度、高密度和高效率的特点[1],已成为当今海底地形测量的重要手段;但同时由于海洋测量的动态性、多波束测深系统本身具有的复杂的结构以及众多的辅助设备,导致影响多波束测深误差源很多[2-7]。精密多波束海底地形测量需要进行有效的深度改正和精确的位置归算,就测点位置归算而言,主要包括动态偏心改正、动态位置传算以及动态时延改正[8]。
本文将对多波束测点位置归算过程中影响测点位置的误差源进行分析,对Rob Hare[9]提出的位置归算误差模型进行改进,分别利用原模型和改进模型计算各误差源对测点位置归算精度估计的影响量以及总的测点位置精度估值,并通过算例对原模型及改进模型进行比对分析。
1 测点位置归算模型
首先建立载体坐标系(x,y,z)和站心大地坐标系(X,Y,Z),两坐标系原点重合,为方便后文计算,将换能器中心作为坐标系原点,横摇角为R、纵摇角为P、航向角为α,在此基础上将分别建立测点位置归算的动态偏心改正模型、动态位置传算模型以及动态时延改正模型[9-12]。
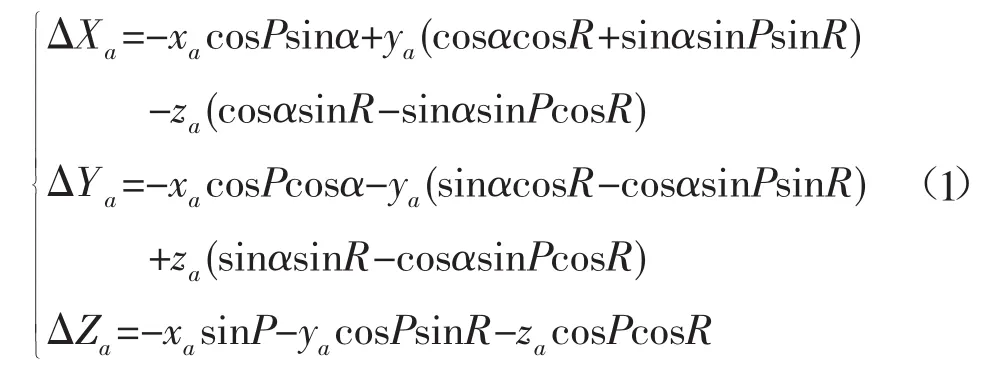
假设定位设备在载体固联坐标系中的坐标为(xa,ya,za),则可得定位设备中心到多波束换能器中心的偏心改正量为(Δxa,Δya,Δza)。利用坐标旋转矩阵,可得在站心大地坐标系中,换能器中心与定位设备中心不一致引起的动态偏心改正模型:
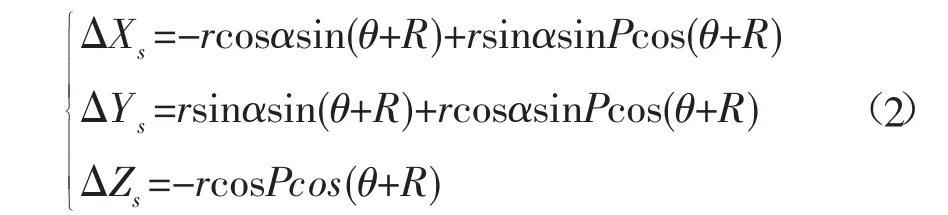
测点相对于换能器中心(坐标原点)在站心大地坐标系中动态位置传算模型为:
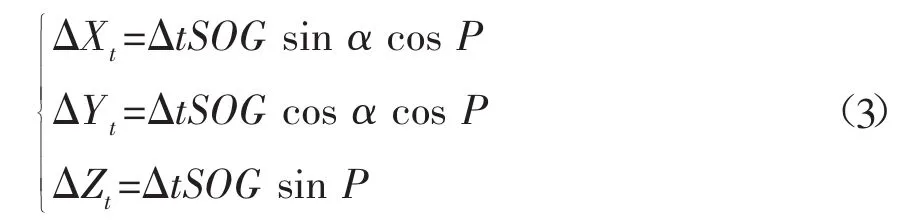
由于多波束测深系统定位和测深时间不同步带来时延误差,需要进行动态时延改正,改正模型为:
经过上述三项改正后,可将测点坐标从站心大地坐标系转到定位系统所在坐标系,转换公式为[10]:

式中:φ为测点的纬度;φm为定位系统的纬度;λ为测点的经度;λm为定位系统的经度;M为子午圈曲率半径;N为卯酉圈曲率半径。此处认为M,N无误差。
根据上述公式推导可以看出,影响测点位置归算的误差源主要包括:定位系统本身、定位设备中心相对于换能器中心的坐标xa,ya,za,横摇角R、纵摇角P、航向角α、声线传播距离r、波束指向角θ、时延t和船速SOG构成。
2 测点位置归算精度估计模型
2.1Rob Hare测点位置归算精度估计模型
结合前面的位置误差源分析,采用Rob Hare位置归算精度估计模型进行计算,具体推导过程如下:
根据(4)式,可得测点位置归算精度估计公式
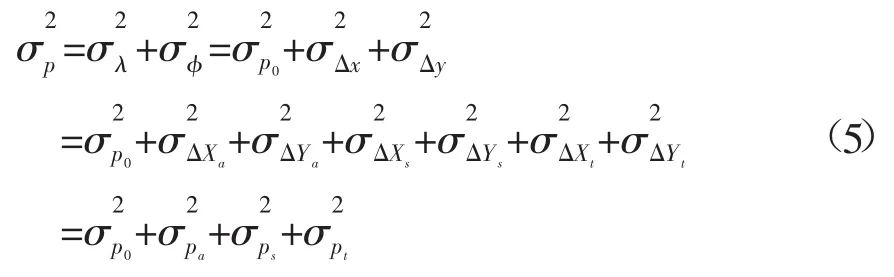
根据式(5)~式(6),可将总的测点位置归算精度估计模型写成如下形式:

式中:系数a1,a2,…,a10分别表示各误差源对测点位置归算精度的影响量。
显然,上述模型在推导过程中并未考虑到改正数之间的相关性,而从式(1)~式(3)可知,各项改正数均与横摇、纵摇和航向角有关,因此它们相互之间是相关联的,所以该模型存在一定的不足,最终得到的位置归算精度也会受到影响。下面将对上述模型进行改进,推导过程中将顾及各改正数之间的相关性。
2.2改进模型
将式(1)~式(3)代入(9)式可得:
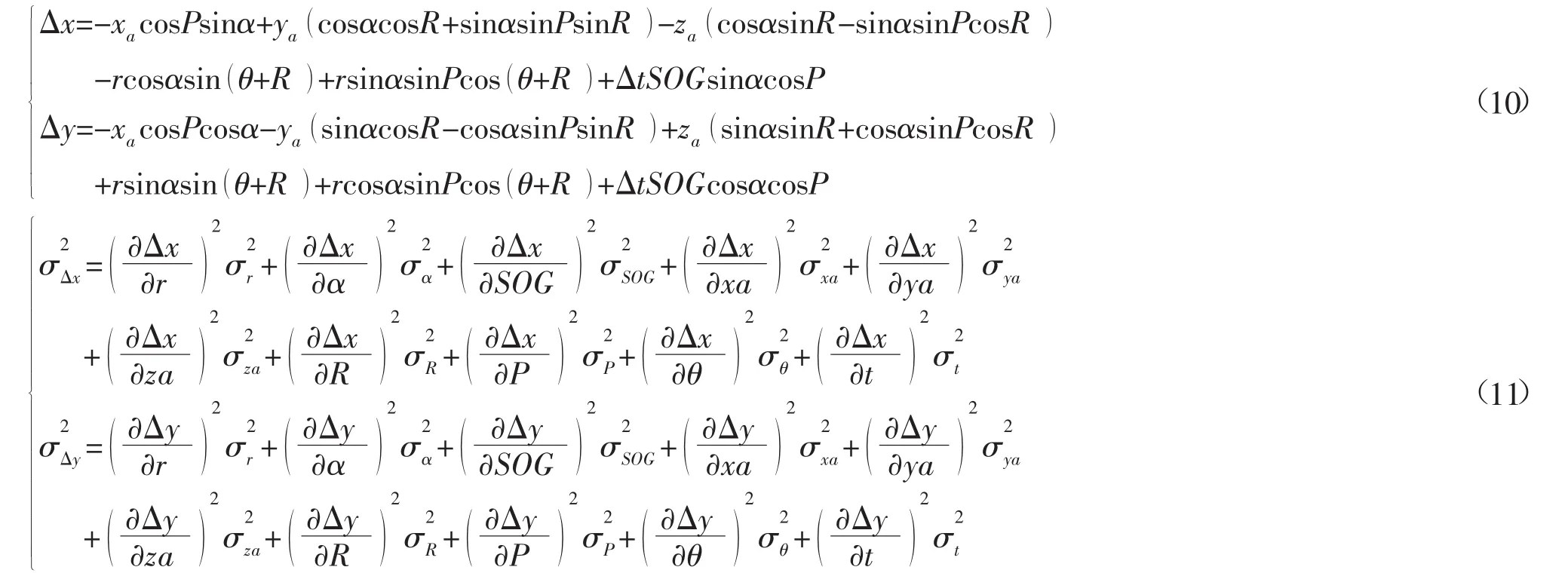
综合式(8)~式(11),将总的测点位置归算精度估计模型改写成下式:
上述即为改进的测点位置归算精度估计模型,其中系数b1,b2,…,b10分别表示各误差源对测点位置归算精度的影响量。
3 算例分析
假设实验采用seabat8101多波束测深系统,工作频率为240 kHz,姿态传感器采用OCTANS III型运动传感器,声速测量使用SVplus声速剖面仪,纵横向波束角为1.5°,测量过程中多波束测深仪、传感器部分参数及技术指标统计如表1~表2所示。
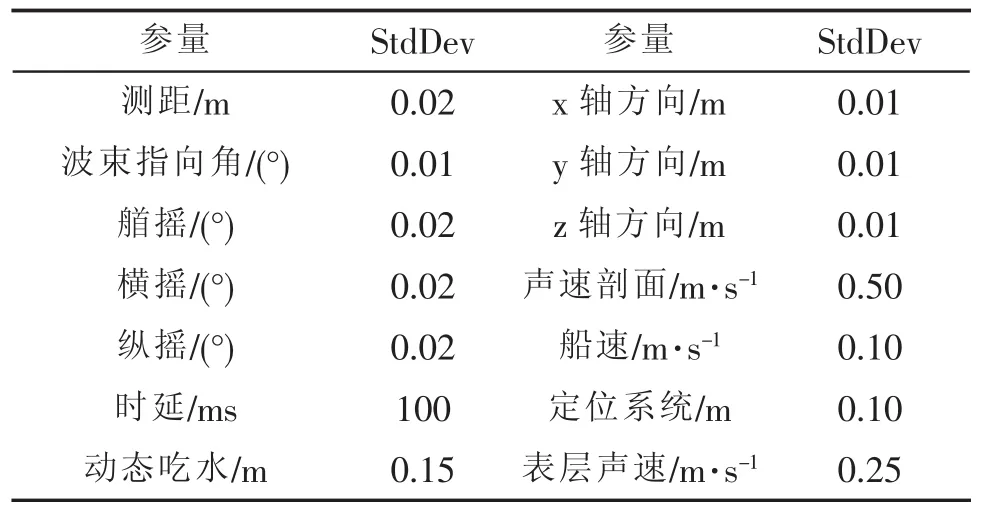
表1 多波束测深系统及传感器的部分参数及技术指标
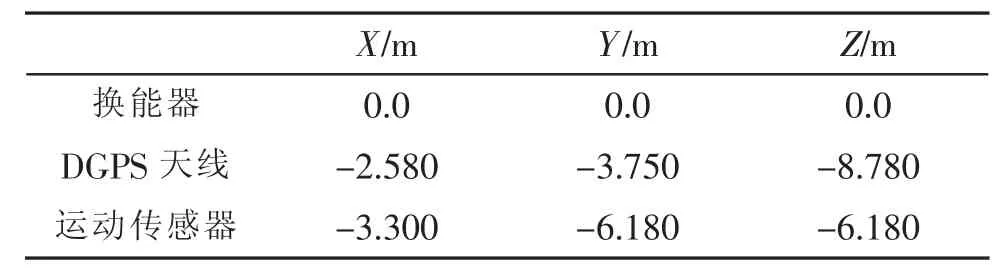
表2 各测量单元在载体坐标系中的空间位置
以一ping数据为例进行分析,该ping包含101个波束,水深为100 m,假设测船实时横摇、纵摇、艏摇均为零,分别采用上述两种模型对该ping中各个波束进行位置误差估算。为叙述方便,下文分析中将两种模型分别概括为模型一、模型二,将计算结果列于表3~表4中,为更加直观显示各误差源对测点位置影响的变化规律,分别采用两种模型绘制误差曲线图,如图1~图2所示,通过分析得到如下结论:
采用两种模型推导的各误差源对测点位置精度估计影响变化规律大体一致,其中航向角误差、测距误差以及波束指向角误差呈U型分布,对位置归算影响最为明显,在中央波束附近对位置归算影响最小,往两侧依次增大;波束指向角误差在中央波束附近变化比较平坦,两侧波束变化剧烈;船速、X轴、Y轴、Z轴、横摇、纵摇以及时延对测点位置归算的影响不随波束指向角变化而变化;采用两种模型进行位置误差估算的主要差异来自航向、横摇、纵摇以及波束指向角误差,其它误差源对测点位置造成的影响相同。
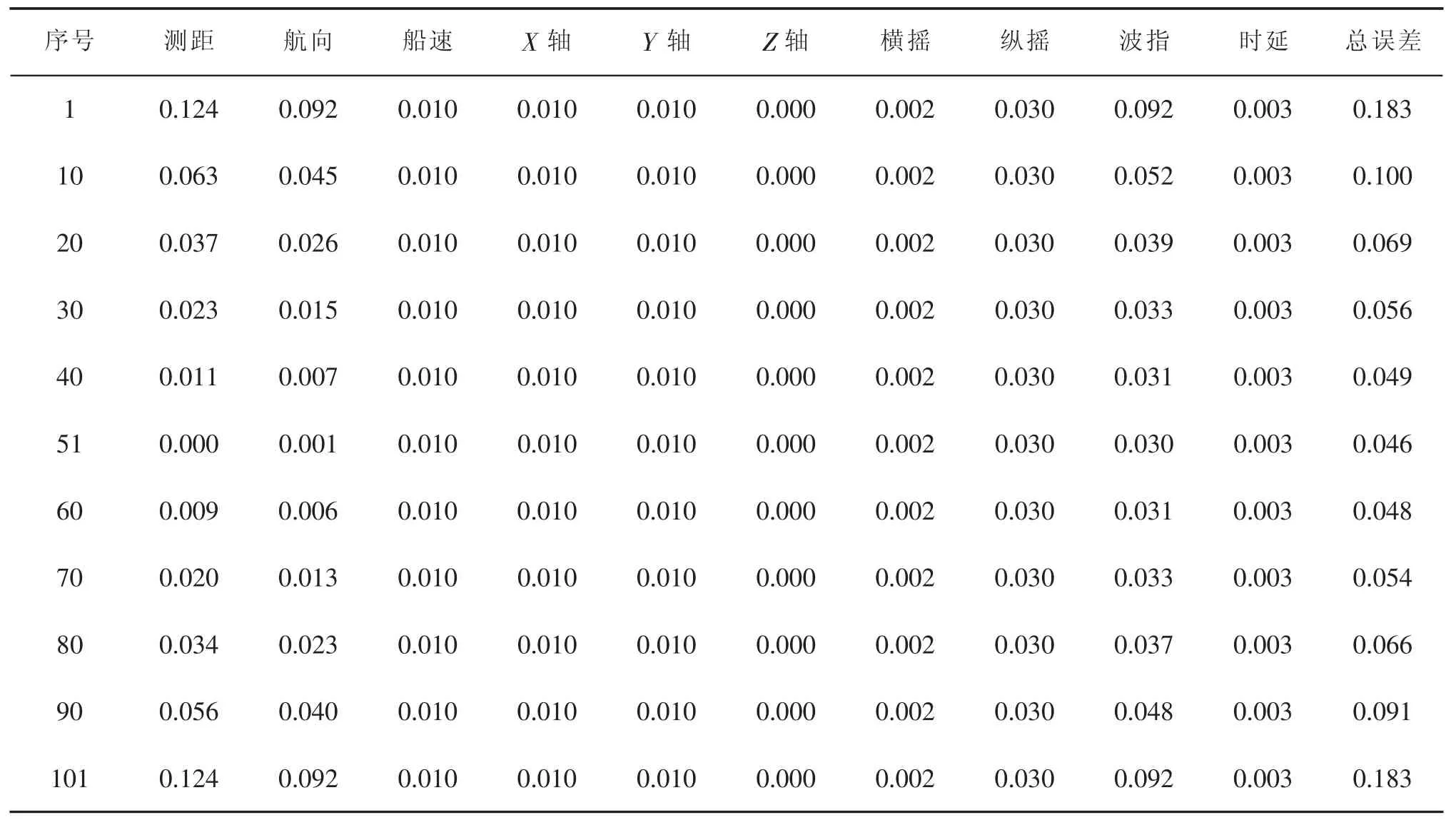
表3 采用模型一推导的各误差源对测点位置影响值
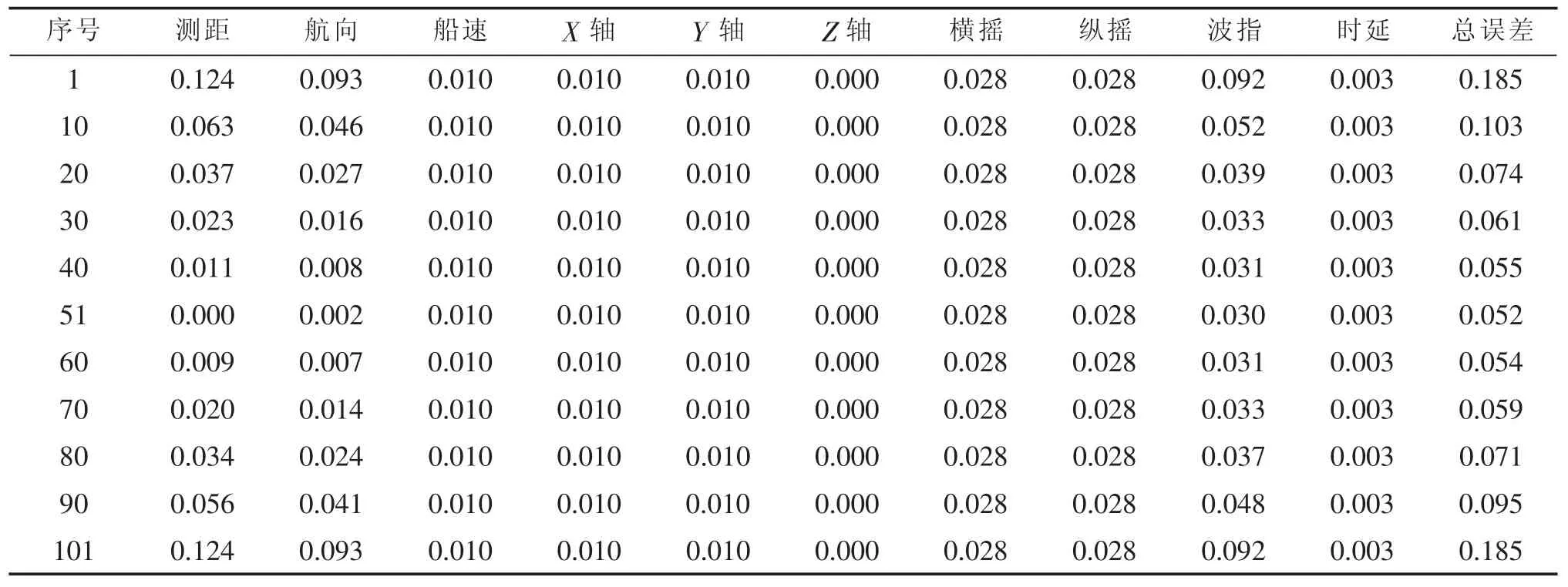
表4 采用模型二推导的各误差源对测点位置影响值
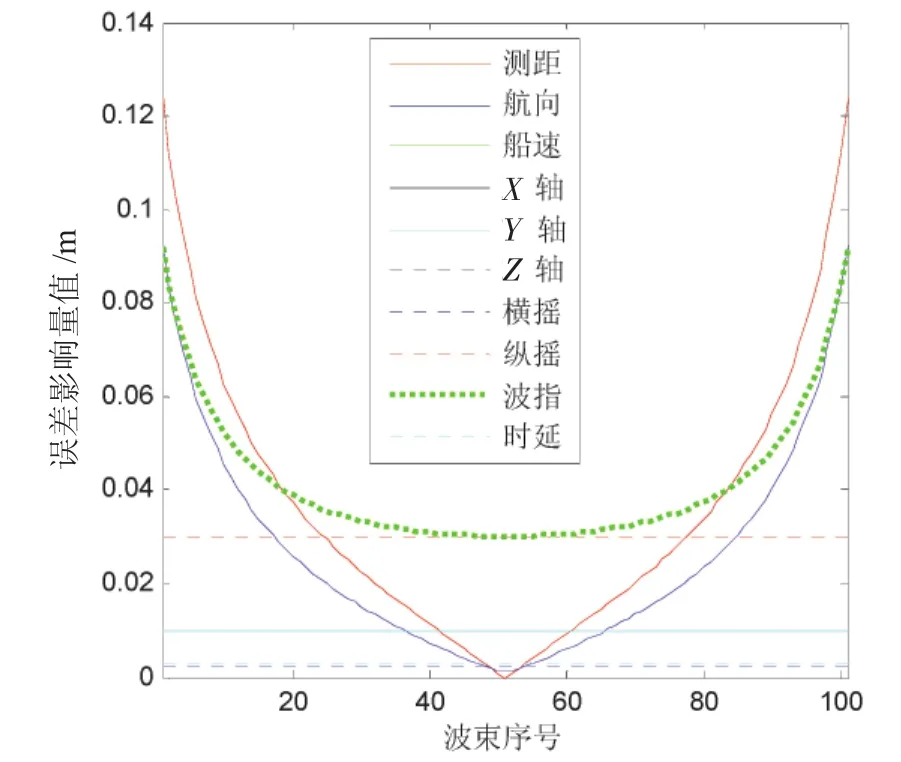
图1 模型一绘制的误差曲线图
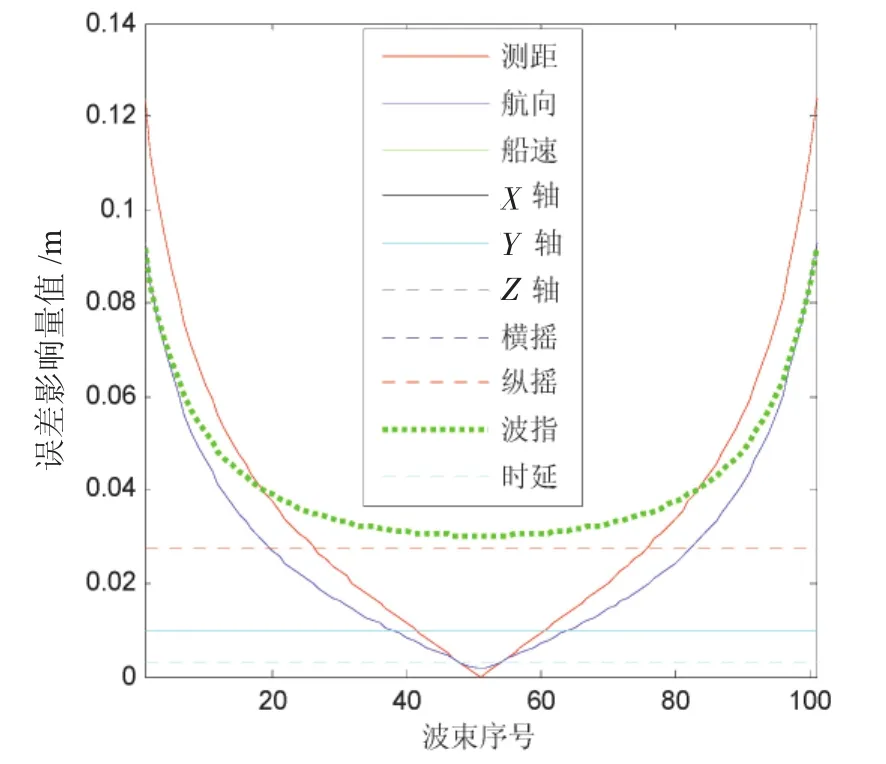
图2 模型二绘制的误差曲线图
分别利用模型一与模型二绘制总位置误差曲线,如图3所示,采用模型二计算的总位置误差值要略大于模型一计算出的值,这是由于模型一假设各改正数之间是相互独立的,并未考虑各个改正数之间的相关性,可以将这部分差异暂且称为改正数耦合误差,其大小为图3中采用模型一与模型二计算出的总误差的差值。此外,在进行最终的测点位置归算精度估计时,还需要顾及定位系统本身的精度σp0。
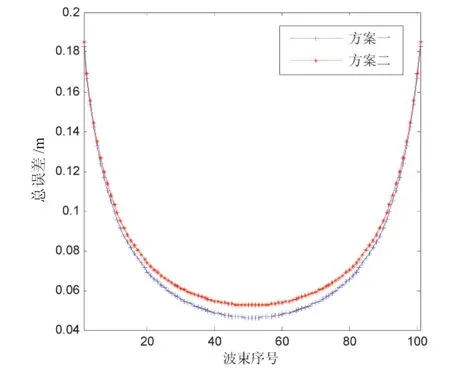
图3 两种模型计算的总位置误差曲线图
4 结论
多波束测点位置归算是多波束测深数据处理的重要过程,位置归算精度将直接影响最终测量成果的质量。本文针对Rob Hare推导误差模型中的不足,建立了一种改进模型,并分别利用两种模型计算出总位置误差大小,分析了各误差源对测点位置的影响规律,由于顾及到了位置归算中各项改正数之间的相关性,新建立的误差模型更加科学合理,最终测点位置归算的精度能够满足测量成果需求,分析计算结果对多波束测深数据质量评估具有一定参考意义,同时可以根据给定的仪器参数深入挖掘测深设备潜能。
[1]陈非凡.多波束条带测深仪研究发展动态[J].海洋技术,1999,18(2):26-32.
[2]李家彪,郑玉龙,王小波,等.多波束测深及影响精度的主要因素[J].海洋测绘,2001(1):27-31.
[3]吴英姿,徐新盛,乔力争.多波束测深系统的精度评估方法研究[J].海洋技术,2003,22(3):65-69.
[4]李宜龙,殷晓冬,张立华,等.交叉检查法在多波束测深精度评估和误差分析中的应用[J].海洋技术,2006,25(1):119-123.
[5]朱庆,李德仁.多波束测深数据的误差分析与处理[J].武汉测绘科技大学学报,1998,23(1):1-4.
[6]阳凡林,李家彪,吴自银.多波束测深瞬时姿态误差的改正方法[J].测绘学报,2009,38(5):450-456.
[7]徐晓晗,刘雁春.海洋测深中时移和偏移效应综合分析与改正[J].海洋测绘,2002,22(2):9-13.
[8]田勋,肖付民,朱小辰,等.多波束测深系统各误差的传播影响规律分析[J].海洋测绘,2011,31(1):24-28.
[9]Hare R.Depth and Position Error Budgets for Multibeam Echosounding[J].International Hydrographic Review,1995(2):37-69.
[10]黄谟涛,翟国君,谢锡君,等.多波束和机载激光测深位置归算及载体姿态影响研究[J].测绘学报,2000,29(1):82-88.
[11]吴超,殷晓冬,张立华,等.基于不确定度的多波束测深数据质量评估方法[J].海洋测绘,2009,29(5):11-14.
[12]申家双,黄谟涛,任来平.机载激光测深的位置归算技术研究[J].海洋测绘,2003,23(5):55-60.
Study on the Effect of the Multibeam Echo Sounder Error Sources on Measurement Point Position Reduction
ZHANG Zhi-wei,BAO Jing-yang,XIAO Fu-min
Department of Hydrography and Cartography,Dalian Naval Academy,Dalian 116018,Liaoning Province,China
To resolve the problem of the insufficient precision estimation model for multibeam measurement point position reduction presented by Rob Hare,an improved model is built considering the correlation among corrections.On the basis of the new model,this paper analyzes the influence of various error sources on measurement point,and deduces the influence quantity of error sources on the reduction precision estimation of measurement point position.Combined with calculating examples,the error curve of each error source as well as the total position error curve are derived by using two kinds of models to calculate the influence level of error sources on measurement point position reduction.Through analysis and comparison of calculated results,the differences of the two models are obtained when assessing the reduction precision of multibeam measurement point position.In the light of the correlation among corrections,the improved model is regarded more scientific and reasonable.
multibeam echosounder system;position reduction;precision estimation;improved model;error curve
P237
A
1003-2029(2016)01-0074-05
10.3969/j.issn.1003-2029.2016.01.012
2015-03-09
国家自然科学基金资助项目(41074002,41576105)
张志伟(1987-),男,博士研究生,主要从事海道测量数据处理理论与方法研究。E-mail:zzwdljy@163.com
