同轴双输出减速器的键合图模型及仿真*
2016-10-25林超黄超蔡志钦
林超 黄超 蔡志钦
(重庆大学 机械传动国家重点实验室,重庆 400044)
同轴双输出减速器的键合图模型及仿真*
林超黄超蔡志钦
(重庆大学 机械传动国家重点实验室,重庆 400044)
首先分析了两输出轴等速反转的条件;然后通过对传动系统的分析,基于键合图的基本原理建立了同轴双输出减速器的键合图模型,在模型中考虑了平均啮合刚度,转动惯量,阻尼等影响因素,根据键合图中的因果关系和功率流,推导出了键合图模型的状态方程;通过对系统进行动态特性仿真,获得了系统内部各变量随时间变化的规律,揭示了系统的传动性能和动态特性;对比不同参数下两输出轴转速的响应曲线,分析了各参数对系统动态特性的影响;最后建立了同轴双输出减速器的简化模型,进行了虚拟样机实验,并将实验结果和键合图计算结果进行了对比,发现利用键合图理论对该类减速器进行动态仿真是有效的.
同轴双输出;减速器;行星轮系;键合图理论;状态方程;动态特性
同轴双输出减速器可以将单一动力源的回转运动转化为两个回转轴线相同、速度大小相等方向相反的输出.当两输出轴上所受阻力矩大小相等方向相反时两者相互抵消,减速器上所受的外力矩之和为零.该特点使同轴双输出减速器广泛应用于共轴双旋翼直升机和水下航行器的传动系统.采用同轴双输出减速器的直升机,其共轴反转的两组旋翼扭矩平衡,不需要尾桨,因此在相同的桨盘载荷、发动机和相同的总重下,同轴直升机的总体纵向尺寸仅为单旋翼直升机的60%左右[1-2].采用同轴对转螺旋桨的水下航行器,其转矩方向相反,减轻航行器横滚控制系统的压力,同时两螺旋桨周向感生速度在尾流中可以部分或全部抵消,这样回收了部分滑流旋转能量,和传统的单螺旋桨相比提高了推进效率[3-4].平行轴轮系、锥齿轮分动结构、差动轮系都可以实现同轴双输出.采用定轴轮系和差动轮系构成的复合轮系有结构紧凑、传动比稳定范围广、传递功率大等优点.
目前对同轴双输出减速器的研究主要集中于结构的设计、运动学分析、功率流分析、系统的固有特性分析以及动力学分析等.蒋仁科等[5]对同轴双输出减速器进行了优化设计,减小了行星架和壳体的体积;Ivanov[6]对单输入双输出差动机构在外力作用下有确定运动规律的原理进行了分析; 文献[2,7]对同轴双输出减速器进行了功率流分析,推导了不产生循环功率流的条件;林腾蛟等[8]对同轴双输出减速器进行了振动分析和噪声预估.邹卓航等[9]分析了同轴双输出减速器的固有特性,讨论了固有频率和行星轮数量的关系.龚建春等[10]基于拉格朗日方程建立了同轴双输出减速器的动力学模型,用数值分析方法得到了时域动态特性.
键合图是一种系统动力学建模方法,它根据能量守恒原则,用基本元素表示系统的基本物理特征和连接方式,在建立物理结构模型的同时可以得到系统的计算结构模型,用统一的方式处理多种能量形式并存系统的建模和仿真[11-12].近年来,键合图理论在齿轮传动领域中得到了广泛的研究.Kim等[13]建立了自动变速器各挡位及加减挡过程的键合图模型;Geitner等[14]利用键合图理论建立了混合动力电动汽车功率分流装置的统一键合图模型;Deur等[15]利用键合图理论建立了典型的四速变速器的控制导向模型,并进行了仿真和实验研究;Luo等[16]利用键合图理论提出了一种普遍适用于行星齿轮传动的动力学模型并将其应用于模态分析;林超等[17]建立了多流传动卷扬机传动系统考虑支撑弹性的耦合振动键合图模型并进行了动态性能分析及实验研究;李庆凯等[18]利用键合图能量守恒和功率流动的特点,得到了一种行星轮系功率流判别的方法.
同轴对转减速器系统是一个单输入双输出的行星齿轮传动系统,内部包含了弹性势能、动能等多种形式能量的转换和流动,利用键合图理论可以很方便地对它进行动态仿真和分析.为了研究同轴对转减速器在一定负载条件下的动态响应规律,文中基于键合图理论推导了系统的状态方程,得到了系统内部各变量随时间的变化规律,分析了不同参数对系统动态特性的影响;此外,利用虚拟仿真实验对键合图方法的正确性进行验证.
1 同轴双输出减速器的基本原理
锥齿轮分动机构中的分轴齿轮可以将输入轴的高速运动转换为内外输出轴的正反转,但是该结构不能实现降低速度、增加扭矩的功能.采用差动轮系结构的同轴双输出减速器可以实现降速增扭的功能.非正常工况下,输出轴上所受阻力矩和转速的关系随时间变化,这就使得机构的运动产生不确定性.
文中研究的同轴对转减速器结构如图1所示,用一个固定轮系将差动行星轮系中的太阳轮和行星轮封闭起来,组成一个复合轮系,消除差动轮系式结构传动比不稳定的缺陷.太阳轮作为输入轴,两输出轴分别为行星架和内齿圈.

图1 同轴双输出减速器结构图
为了简化分析,将固定轮系部分看作是行星架转速为零的行星轮系,那么同轴对转减速器就可以看成由两个2K-H机构组成的行星齿轮传动系统.根据中心论、行星轮、行星架之间的关系可以得到:

(2)
根据要求,内外两轴的转速应该大小相等、方向相反,即ωh=-ωb,因此可以得到内外两输出轴等速反转的条件为
(3)
即只要图1所示的传动系统中齿轮齿数满足式(3)的要求,系统两输出轴的转速就大小相等、方向相反.在传动比给定的前提下,可以根据式(2)和式(3)的约束合理分配各齿轮的齿数.
2 同轴双输出减速器的键合图模型
同轴双输出减速器系统是一个单输入双输出、包含多种形式能量流动的复杂系统,它的内部有弹性势能、动能等多种形式的能量流动和转换.键合图理论可以用一个统一的方法处理多种能量并存的复杂系统的动态分析问题[12],因此文中采用键合图方法对同轴双输出系统进行仿真及分析.
通过对同轴双输出减速器基本原理的分析,考虑到各组件上的转动惯量、齿轮啮合的平均啮合刚度及轴的刚度、旋转组件上受的阻尼等因素,按照键合图理论和功率的流向可以很方便地得到同轴双输出减速器的键合图模型,如图2所示.键合图中各元件代表的意义如表1所示.
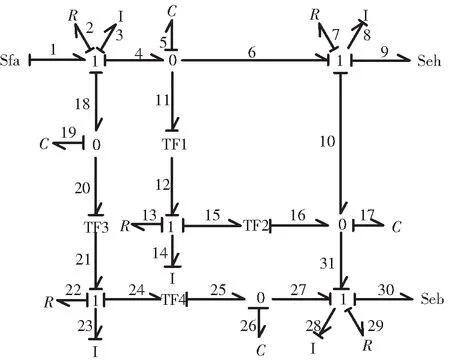
图2 同轴双输出减速器的键合图模型

符号代表的意义Sfa、Seh、Seb分别为输入轴上作用的流源、内轴上作用的势源、外轴上作用的势源R2、R7、R13、R22、R29分别为输入轴,外轴,行星齿轮g,双联行星齿轮2、3,外轴上的阻尼I3、I8、I14、I23、I28分别为输入轴,外轴,行星齿轮g,双联行星齿轮2、3,外轴上的转动惯量C5、C17、C19、C26容性元(柔度),分别和太阳轮a、行星轮g之间的平均啮合刚度,行星轮g、内齿圈b之间的平均啮合刚度,行星轮2、太阳轮1之间的平均啮合刚度,行星轮3、内齿圈4之间的平均啮合刚度以及对应轴的刚度有关TF1、TF2、TF3、TF4变换器,其大小分别为Zg/Za、-Zb/Zg、Z2/Z1、-Z4/Z3
容性元C的大小和齿轮的平均啮合刚度及轴的刚度相关.啮合刚度是指使一对或几对同时啮合的轮齿在1 mm齿宽上产生1 μm挠度所需的载荷,平均啮合刚度是指啮合刚度一个周期内的平均值.当力矩大小为T时,将啮合点沿着啮合线方向的位移转化为啮合点沿着圆周方向的扭转角位移,可得:
(4)
其中,b为齿宽,rb为基圆半径,k为平均啮合刚度.
轴变形扭转角位移为
(5)
因此键合图中各容性元的大小为
(6)
定义综合刚度为
(7)
3 系统的状态方程
状态变量是用来表征系统内部状态变量随时间变化的物理变量,取键合图中有积分因果关系的惯性元的广义动量p和容性元的广义位移q作为状态变量,即状态变量为
(8)
取势源和流源作为输入变量,则输入变量为
(9)
根据键合图中的因果关系和功率流动方向可以得到系统状态变量之间的关系即状态方程为
(10)
4 系统的动态仿真及分析
4.1系统动态仿真
根据传动系统的参数和材料的力学性能,可以确定状态方程中各个惯性元、容性元和阻性元等参数大小.文中以卡-32直升机传动系统为例进行分析,其具体参数见表2.
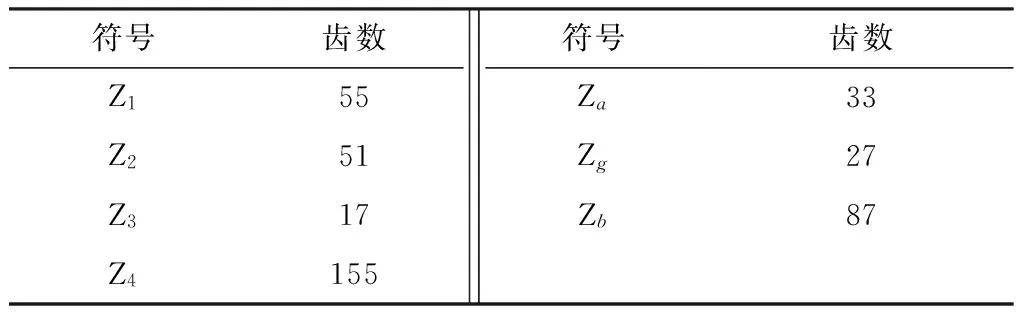
表2 减速器基本参数
采用数值解法中的四阶龙格-库塔法对状态方程组进行求解,可以得到各状态变量随时间变化的关系.根据储能元件的特性方程可以得到系统中各转速和转矩随时间变化的仿真曲线,如图3所示.
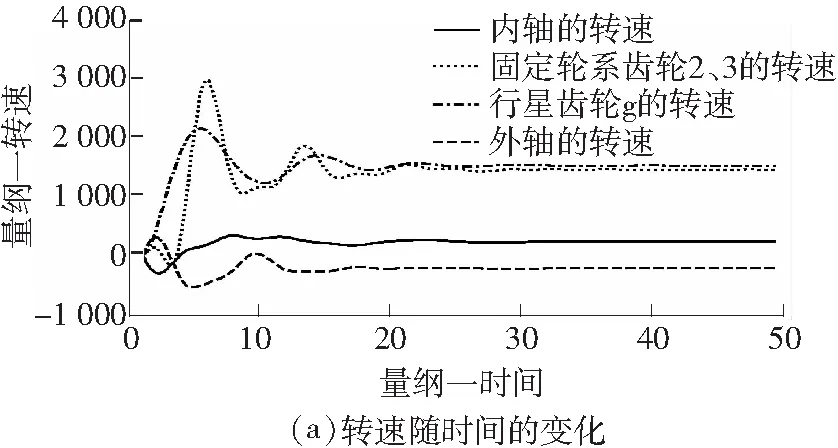

图3 各转速和转矩随时间的变化
从图中曲线的形状可以看出系统中各转速和力矩随着时间变化的趋势,它们都是经过短暂的波动后达到一个稳定值.不同曲线有着不同的波动幅值、波动周期和波动时间,最终达到的稳定值大小也不同.曲线的波动幅值可以反映出系统的超调量大小,而曲线从开始波动到达到稳定值时间的长短则可以反映出系统的响应速度,稳定值的大小即为系统中各转速或力矩达到稳定状态后的大小.
通过对各转速和转矩仿真曲线的观察,可以直观地了解到传动系统稳定后各转速、力矩的大小等传动性能以及响应速度等动态特性.
4.2系统动态响应的影响因素
同轴双输出减速器是一个单输入双输出的系统,输出轴的转速波动能够直接反映出系统的动态特性,因此以内、外两输出轴的转速为作为研究对象,分析不同参数对两输出轴转速的影响.
从状态方程可以看出,状态方程的系数会影响求解出来的状态变量随时间的变化规律,因此系统内部的阻尼、各组件的转动惯量、综合刚度以及负载大小都可能会影响到系统的动态特性.分析过程采用控制变量法,即只改变一个参数的大小、保持其他参数大小不变,分析该参数的变化对系统的影响.
4.2.1阻尼对动态响应的影响
保持其他参数不变,将系统中各部件阻尼R加倍或减半,得到3种状态下两输出轴转速随时间的波动曲线,如图4所示.


图4 阻尼对输出轴转速的影响
从图中可以看出,在阻尼的作用下,两轴的转速都是经过短暂的振荡后达到稳定值,稳定后的两输出轴的转速大小近似相等,符号相反;减小阻尼,转速振荡的周期稍微减小,振荡的幅值增加,振荡幅值衰减变慢,响应时间变长;增加阻尼,振荡的周期稍微增加,振荡的幅值减小,振荡幅值衰减速度增快,响应时间变短.
过大的阻尼会导致过多的功率损耗,降低系统的效率,因此不能选取过大的阻尼,为了提高系统的动态特性,应该适当增加系统各组件所受阻尼.在结构已确定的情况下,可以通过改变润滑油黏度等措施来改变各部件所受阻尼大小.
4.2.2惯量对动态响应的影响
保持其他参数不变,将系统中各部件转动惯量加倍或减半,得到3种状态下量输出轴转速随时间的波动曲线,如图5所示.

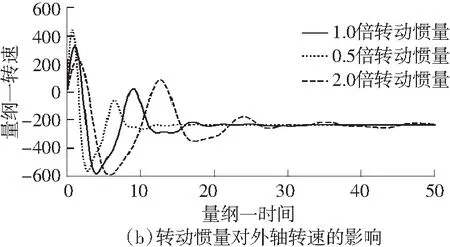
图5 转动惯量对输出轴转速的影响
从图中可以看出随着转动惯量的增加,振荡衰减变慢,响应时间延长;随着转动惯量的减小,振荡衰减变快,响应时间缩短.
因此在不影响其他性能的条件下,应该使各组件的转动惯量尽可能小.在设计的时候可以通过采用高强度材料、优化设计等方法来减小各组件的转动惯量.
4.2.3综合刚度对动态响应的影响
保持其他参数不变,将系统中各部件综合刚度加倍或减半,即1/C加倍或减半,得到3种状态下输出轴转速随时间的波动曲线,如图6所示.
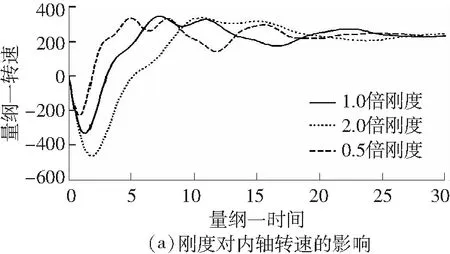

图6 刚度对输出轴转速的影响
从图中可以看出,随着综合刚度的增加,振荡的周期减小,响应时间缩短;随着综合刚度的减小,振荡的周期增加,响应时间延长.为了提高系统的响应速度,在不影响其他性能的条件下应尽可能提高综合刚度.在设计的时候可以通过采用弹性模量大的材料,增加轴截面极惯性矩、增加有效齿宽、增加重合度等措施来提高综合刚度.影响动态响应的各因素有的时候是相互制约的,比如用增加有效齿宽的方法来提高综合刚度的时候会使转动惯量增加,而根据前文的分析可知,转动惯量的增加对于系统的动态特性是不利的.这个时候就要综合评价各个因素对系统动态特性的影响,用优化设计等方法来使动态特性最优.
4.2.4负载对动态响应的影响
共轴双旋翼直升机在航向不变的情况下,上下两旋翼产生的负载扭矩相互平衡,它的航向控制是通过上下旋翼总距差动产生不平衡扭矩实现的[1].即航向不变的情况下,传动系统内外两轴负载扭矩相等,通过改变内外轴负载扭矩的大小实现偏航.
保持其他参数不变,调整负载大小得到以下3种状态下两输出轴转速随时间的波动.状态1:保持航向不变,此时内外轴负载力矩大小相等;状态2:向内轴旋转方向偏航,此时内轴负载力矩减小,外轴负载力矩增加;状态3:向外轴旋转方向偏航,此时内轴负载力矩增大,外轴负载力矩减小.在启动的时候,内外两轴负载大小相等,方向相反处于状态1,当系统进进入稳定状态的某个时刻,改变内外轴上的阻力矩,分别使系统处于状态2和状态3,如图7所示.

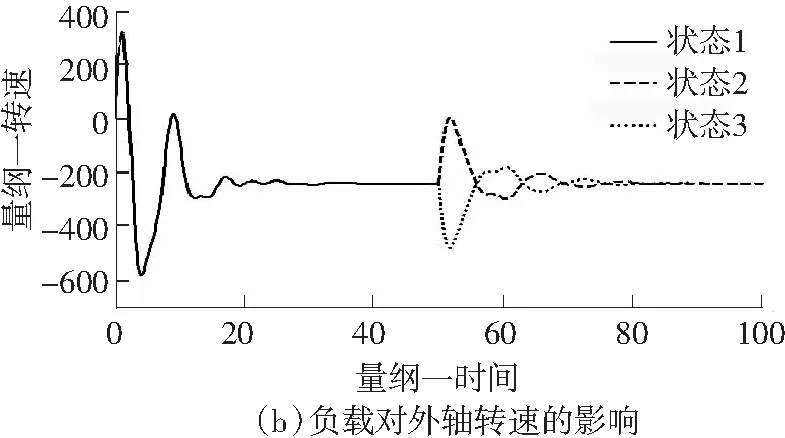
图7 负载对输出轴转速的影响
从图中可以看出,在某一时刻改变两输出轴上所受负载大小之后,两输出轴转速发生波动后回到稳定值.两种状态下,转速波动的幅值基本相等,回到稳定值的时间也基本相等.这是因为在状态2和状态3中,每个输出轴负载的改变量大小相等,符号相反.
4.3虚拟样机仿真实验
根据表2中减速器的基本参数,建立了同轴对转减速器的简化模型,如图8所示.在模型中略去了各部分的支撑机构.

图8 同轴双输出减速器简化模型
将简化模型导入Adams中,对模型各部分施加约束并定义啮合齿轮之间的接触力.在输入轴上施加转速作为驱动,在两个输出轴即内齿圈b和行星架h上施加大小相等方向相反的扭矩作为负载.测量两输出部分的转速,将测量结果转换为和键合图计算结果相同的量纲,对比结果如图9所示.
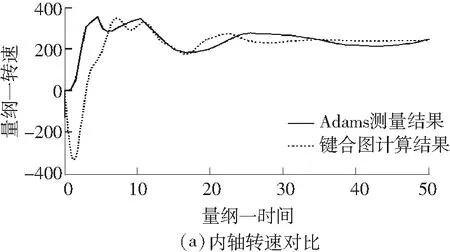
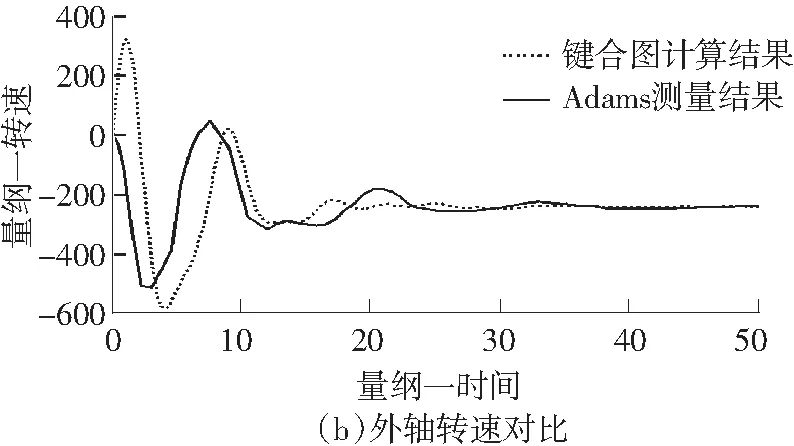
图9 Adams 测量结果
从图中可以看出,Adams测量结果和键合图计算结果图形特征较为吻合,振荡之后的稳定值基本相等.对比结果说明利用键合图理论对该类减速器进行动态仿真是有效的.
5 结语
文中介绍了同轴双输出减速器的结构,分析了同轴双输出减速器两输出轴近似等速旋转的条件;根据减速器的结构以及键合图的基本理论,建立了同轴双输出减速器的键合图模型;依据键合图中的因果关系和功率流,推导出了键合图模型的状态方程;根据状态方程,对系统进行了仿真,获得了系统内部各力矩和速度随时间变化的规律,揭示了系统的传动性能和动态特性;通过不同参数下两输出轴转速的响应曲线,分析了各参数对系统动态特性的影响,为提高系统动态特性指明了方向;虚拟样机仿真实验结果表明,利用键合图理论对该类减速器进行动态仿真是有效的.基于键合图理论对同轴减速器的仿真分析为进一步研究该类型传动系统奠定了基础.
[1] 陈铭.共轴双旋翼直升机的技术特点及发展 [J].航空制造技术,2009(17):26-31.
CHEN Ming.Technology characteristic and development of coaxial rotor helicopter [J].Aeronautical Manufacturing Technology,2009(17):26-31.
[2]徐步算,李英明,单建平,等.卡-32共轴式旋翼直升机传动系统的循环功率流分析 [J].机械传动,2014,38(10):39-42.
XU Bu-suan,LI Ying-ming,SHAN Jian-ping,et al.Analysis of cycle power flow of drive system of ka-32 for coaxial counter-rotating twin-rotor helicopter [J].Journal of Mechanical Transmission,2014,38(10):39-42.
[3]罗凯,汤浩,孙军亮.水下航行器对转减速器设计与特性分析 [J].机械传动,2010,34(11):49-52.
LUO Kai,TANG Hao,SUN Jun-liang.Analysis of the construction principle and characteristics of contra rotating reducer of superspeed underwater vehicles [J].Journal of Mechanical Transmission,2010,34(11):49-52.
[4]EYAL K.Analysis and experiments for contra-rotating propeller [D].Massachusetts:Department of Mechanical Engineering,Massachusetts Institute of Technology,2011.
[5]蒋仁科,林腾蛟,荣崎,等.同轴双输出行星齿轮减速器结构优化设计 [J].机械研究与应用,2008,21(1):84-87.
JIANG Ren-ke,LIN Teng-jiao,RONG Qi,et al.Structural optimal design of coaxial planetary reducer with dual power output [J].Mechanical Research & Application,2008,21(1):84-87
[6]IVANOV K S.Dynamics of gear differential with one input only [C]∥12th IFToMM World Congress.Besancon:Springer,2007:1-6.
[7]SHT W K,LI L J,QIN D T,et al.Analysis of power flow in a counter-rotating epicyclic gearing for electrical propulsion system [J].Proceedings of the Institution of Mechanical Engineers,Part C:Journal of Mechanical Engineering Science,2011,225(12):2973-2980.
[8]林腾蛟,蒋仁科,李润方,等.同轴双输出行星减速器振动分析及噪声预估 [J].重庆大学学报(自然科学版),2007,30(11):1-4.
LIN Teng-jiao,JIANG Ren-ke,LI Run-fang,et al.Vibration analysis and noise evaluation of coaxial planetary gear reducer with dual power output [J].Journal of Chongqing University (Natural Science Edition),2007,30(11):1-4.
[9]邹卓航,刘敬,石万凯.同轴对转行星齿轮传动系统的固有特性 [J].重庆理工大学学报(自然科学版),2013,27(8):41-46.
ZOU Zhuo-hang,LIU Jing,SHI Wan-kai.Natural characteristics of co-axial counter-rotating epicyclic transmis-sion [J].Journal of Chongqing Institute of Technology (Natural Science Edition),2013,27(8):41-46.
[10]龚建春,石万凯,刘敬.同轴对转行星齿轮传动系统动态特性分析 [J].振动与冲击,2014,33(7):99-104.
GONG Jian-chun,SHI Wan-kai,LIU Jing.Dynamic characteristics analysis for a co-axial counter-rotating planetary gear transmission system [J].Journal of Vibration and Shock,2014,33(7):99-104.
[11]WOLFGANG B.Bond graph methodology:development and analysis of multidisciplinary dynamic system models [M].London:Springer London,2010.
[12]王中双,陆念力.复杂柔性多体系统耦合动力学的键合图法 [J].华南理工大学学报(自然科学版),2006,34(11):33-38.
WANG Zhong-shuang,LU Nian-li.Bond graph method to investigate coupling dynamics of complex flexible multi-body system [J].Journal of South China University of Technology (Natural Science Edition),2006,34(11):33-38.
[13]KIM J H,CHO D I D.An automatic transmission model for vehicle control [C]∥Institute of Electrical and Electronics Engineers Conference on Intelligent Transportation System.Boston:IEEE,1997:759-764.
[14]GEITNER G H,KOMURGOZ G.Unified power flow based modeling of power split for Hybrid Electric Vehicles assuming three connections [C]∥2011 International Conference on Consumer Electronics,Communications and Networks.Xianning:IEEE,2011:5464-5469.
[15]DEUR J,ASGARI J,HROVAT D,et al.Modeling and analysis of automatic transmission engagement dynamics-linear case [J].Journal of Dynamic Systems Measurement & Control,2006,128(2):263-277.
[16]LUO Yu-tao,TAN Di.Dynamics modeling of planetary gear set considering meshing stiffness based on bond graph [J].Procedia Engineering,2011,24(11):850-855.
[17]林超,李润方,谢永春,等.双驱动卷扬机多流传动系统的动态性能分析及试验研究 [J].机械工程学报,2002,38(12):66-69.
LIN Chao,LI Run-fang,XIE Yong-chun,et al.Research on the dynamic analysis and test for multi-flow transmission system of double drive [J].Chinese Journal of Mechanical Engineering,2002,38(12):66-69.
[18]李庆凯,唐德威,姜生元,等.封闭式行星轮系功率流判别的键合图法 [J].北京航空航天大学学报,2012,38(9):1250-1254
LI Qing-kai,TANG De-wei,JIANG Sheng-yuan,et al.Method of bond graph for distinguishing power flow of closed planetary gear train [J].Journal of Beijing University of Aeronautics and Astronautics,2012,38(9):1250-1254.
Supported by the National Natural Science Foundation of China(51275537)
Bond Graph Model and Simulation of Coaxial Dual-Output Reducer
LINChaoHUANGChaoCAIZhi-qin
(State Key Laboratory of Mechanical Transmissions,Chongqing University,Chongqing 400044,China)
In this paper,firstly,the conditions for two output shafts with opposite but uniform speed are analyzed. Secondly,a bond graph model of coaxial dual-output reducer is established on the basis of bond graph theory,in which such factors as average mesh stiffness,rotational inertia and damping are considered. Then,according to the causality and power flow in bond graph,the corresponding equation of state is derived,and a system simulation is conducted to discover the variations of system variables with time and to explore the transmission performance and dynamic characteristics of the system. Moreover,the influences of various parameters on system’s dynamic characteristics are analyzed by comparing the response curves of output shaft speed at different parameters. Finally,a simplified model of coaxial dual-output reducer is established,a virtual prototype experiment is made,and the results are compared with those obtained by bond graph method. It is found that the bond graph theory is effective in the dynamic simulation of coaxial dual-output reducer.
coaxial dual output; reducer; planetary gear train; bond graph theory; state equation; dynamic characteristic
1000-565X(2016)07-0034-07
2015-11-03
国家自然科学基金资助项目(51275537)
林超(1958-),男,教授,博士生导师,主要从事新型齿轮传动系统的设计、分析与制造,机械设计计算机辅助工程,微纳精密传动理论与制造等研究.E-mail:linchao@cqu.edu.cn
TH 132doi: 10.3969/j.issn.1000-565X.2016.07.006
