实时混合模拟误差的理论分析及试验验证
2016-10-24徐伟杰
黄 亮 郭 彤 徐伟杰
(东南大学混凝土及预应力混凝土结构教育部重点试验室,南京210096)
实时混合模拟误差的理论分析及试验验证
黄亮 郭彤 徐伟杰
(东南大学混凝土及预应力混凝土结构教育部重点试验室,南京210096)
为研究实时混合模拟中幅值比率误差和时滞对试验结果的影响,选用弹簧作为试验子结构进行研究,观测和分析了测量位移与计算位移之间的微小误差.假定在试验过程中幅值比率误差和时滞处处相等,采用时滞微分方程建立了实时混合模拟的数学模型,给出了微时滞下自由振动和简谐振动的近似解.结果表明,理论分析结果与试验结果较为相似,说明所提数学模型具有合理性和准确性.误差会导致作用在试验子结构上的外力失真,并影响了数值子结构的位移峰值和稳态振幅.理论分析结果与试验结果之间的微小差异主要受假设简化、测量噪声、累积误差等因素的影响.
实时混合模拟;时滞微分方程;误差分析;幅值比率误差;时滞
实时混合模拟[1]是一种新型抗震试验方法,其核心是将低速的拟动力试验快速化、同步化,适用于试验对象局部不规则、非线性等复杂情况.
本文采用实时混合模拟试验方法,研究了以弹簧为试验子结构的单自由度体系在简谐振动和地震作用下的响应.采用时滞微分方程建立了实时混合模拟的数学模型,给出了微时滞条件下方程的近似解,并对误差进行了分析.
1 实时混合模拟试验原理及步骤
实时混合模拟是一种数值计算和试验加载进行同步数据交互的联机试验方法,其原理如图1所示.
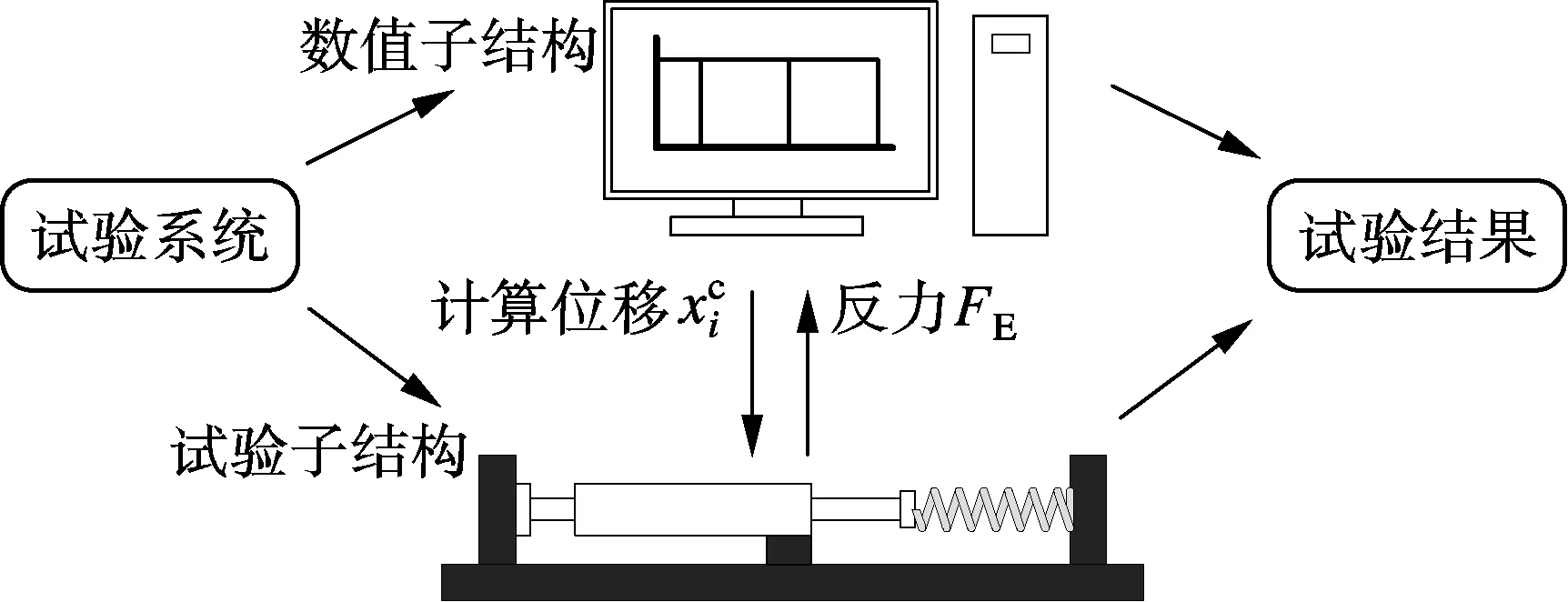
图1 实时混合模拟原理示意图
试验将研究对象分为数值子结构和试验子结构,数值子结构由有限元数值模拟,试验子结构由作动器同步施加荷载并测量反力.试验步骤如下[2]:
① 将研究对象在空间和时间上离散,建立结构的计算模型和离散运动方程,即
(1)
④ 重复步骤②和③,直至试验结束.
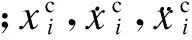
试验流程如图2所示.图中,N为试验步数.
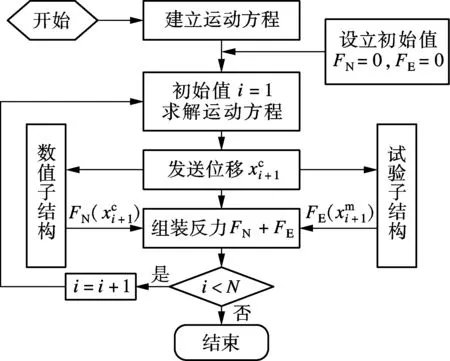
图2 实时混合模拟流程图
试验发现作动器机械传动具有滞后性.作动器运动需通过数电信号变换、油源增压、液压传导和活塞驱动等步骤,因而不能同步、准确地抵达指定位置,由此产生的时间延迟即为时滞.作动器到达的实际位置与指令位置的比值(即测量位移与计算位移的比值)为幅值比率误差.文献[3]指出时滞对系统产生负阻尼效应,破坏系统的稳定性,导致试验结果发散,影响试验数据同步耦合.目前,多采用补偿方法(如多项式外推法、倒转补偿、自适应补偿等)减少误差的影响.本文主要分析的是时滞效应的影响,故未采用补偿方法.
2 单自由度实时混合模拟试验
本试验是以弹簧为试验子结构的单自由度体系实时混合模拟试验,目的在于验证幅值比率误差和时滞的存在,并采用理论和试验对比分析方法研究幅值比率误差和时滞对试验结果的影响.
试验中的数值子结构为一个单层两跨平面框架,利用有限元软件模拟其水平振动;试验子结构为独立弹簧,可在水平方向拉伸压缩.由作动器对试验子结构同步施加外力,通过数据交互技术对数值子结构和试验子结构的反力进行同步耦合.试验模型如图3所示.
图3 试验模型图
2.1试验设备
试验于东南大学九龙湖土木交通实验室内完成,设备及材料包括反力架、作动器和试验弹簧.作动器型号为MTS 244.21,最大输出荷载为50 kN,最大位移为±250 mm.试验弹簧刚度为3.5 N/mm,伸缩范围为±30 mm.试验软件包括有限元软件OpenSees和数学运算软件Matlab.设备装置如图4所示.
2.2试验参数
2.2.1 参数设定
刚性梁质量m=3 546.3 kg,阻尼比ξ=0.05.梁刚度远大于柱刚度,数值子结构近似为水平方向的单自由度体系,等效侧向刚度kN=31.5 N/mm.试验子结构的弹簧刚度kE=3.5 N/mm;试验子结构刚度占整体刚度的比例η=0.1.
系统初始位移和速度均为零, 分别受到4种简谐激励和3种地震激励作用,采样频率均为50 Hz.激励信号如表1所示.
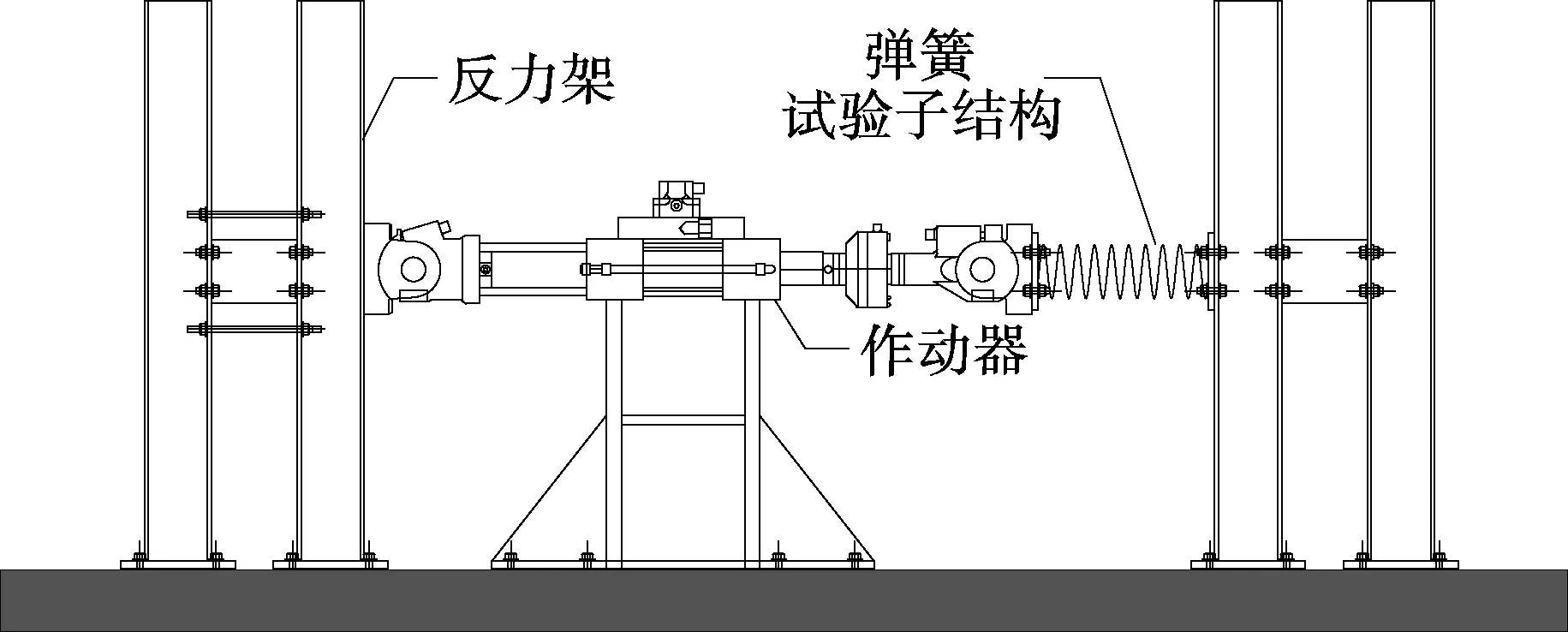
(a) 系统示意图

(b) 试验装置图图4 设备装置
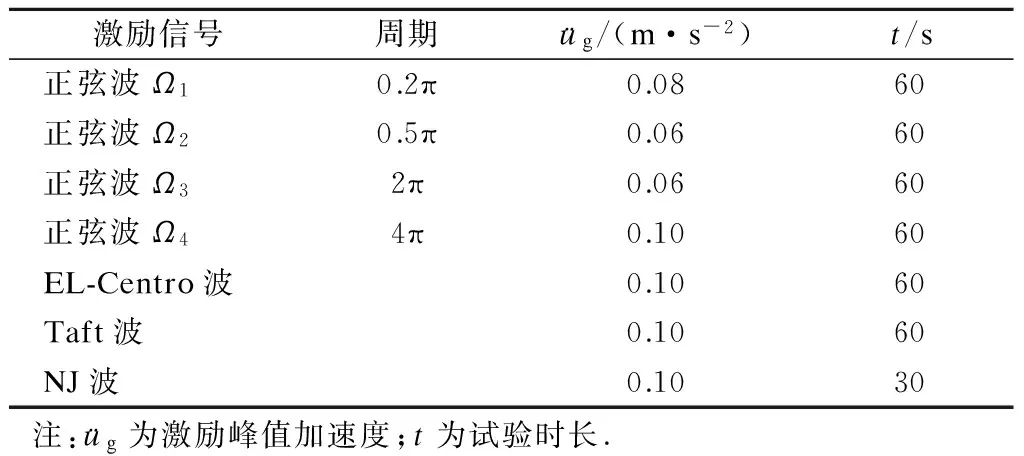
表1 激励信号表
2.2.2积分算法
试验采用Matlab软件中的Simulink模块进行流程控制,控制步长为1/1 024 s.在有限元软件OpenSees中选用了α-OS积分算法[4],该算法是一种预测-修正算法,通过引入参数α来修正运动方程,具有自主控制能量耗散的优点.
2.3试验结果及分析
(2)

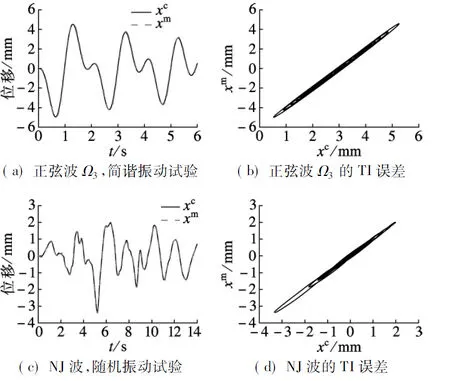
在正弦波Ω3和NJ波的激励下,计算位移与测量位移的响应图及追踪指示误差TI分析图见图5.
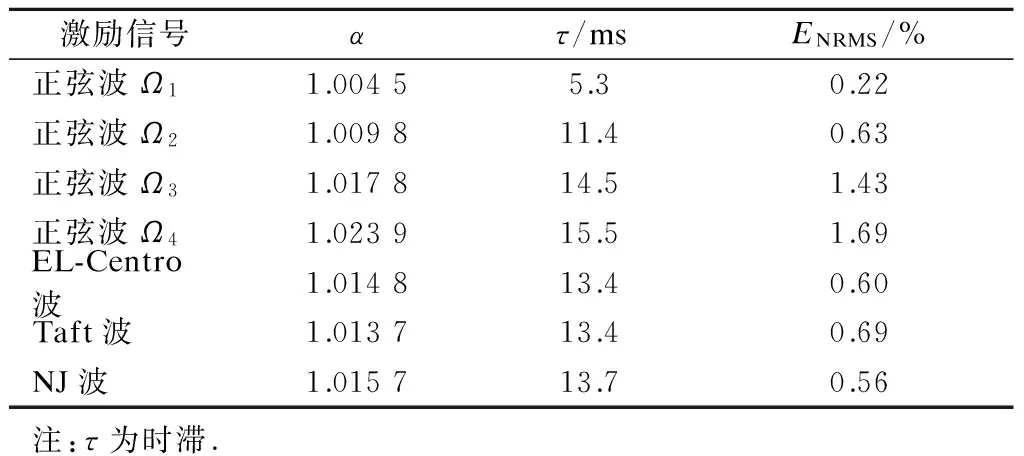
表2 频域分析结果

由表2还可发现,ENRMS,α,τ三种误差均随位移输入信号频率的增加而增大,并具有一定的随机性.这是因为含PID校准的作动器控制软件对低频信号追踪较好,而对于高频信号和随机信号的追踪表现则一般.试验中,输入信号为正弦波Ω4时误差最大,此时ENRMS=1.69%,τ=15.5 ms,α=1.023 9.由此可知,该实时混合模拟试验的同步性较差.
3 含误差的实时混合模拟模型分析
3.1实时混合模拟数学模型
采用直接平衡法[7],实时混合模拟的连续运动方程为
(3)
假设数值子结构与试验子结构的反力分别仅与计算位移和测量位移相关,即
FN(t)=kNxc(t),FE(t)=kExm(t)
(4)
理想状况下,试验子结构与数值子结构的位移完全相等,即xm(t)=xc(t);而在试验中,试验子结构的实际位移与指令信号之间存在着幅值比率误差α和时滞τ.假设xm(t)与xc(t)之间的幅值比率误差α和时滞τ在试验过程中处处相等,即
xm(t)=αxc(t-τ)
(5)

(6)
式(6)为时滞微分方程.根据表2中的试验分析结果及伺服系统的模型分析[8]可知,幅值比率误差和时滞的误差均较小,本文仅考虑微时滞下时滞微分方程的解,即α,τ的取值范围分别为[0.95, 1.05]和[0,0.05] s.
3.2微时滞自由振动方程的近似解

当α与τ存在误差时,式(6)可改写为
αηω2xc(t-τ)=0
(7)

理想条件下,计算位移与测量位移完全同步且相等.设x(t)为t时刻的理想位移,则式(6)可表示为
(8)
式(8)在低阻尼体系(ξ<1)下的通解为
(9)
当结构处于低阻尼(ξ<1)状态时,令xc(t)=exp(λt),则式(7)的特征方程[9-10]可表示为
λ2+2ωξλ+(1-η)ω2+αηω2exp(-λτ)=0
(10)
式中,λ为特征值.式(10)为超越方程,仅有数值解.
低阻尼体系中,特征值较小,故将exp(-λτ)级数展开并保留前2项,则式(10)可近似为
λ2+2ωξλ+(1-η)ω2+αηω2(1-λτ)=0
(11)
式(11)的解为

(12)


(13)
当α=1,τ=0时,式(13)可退化为式(9).
3.3微时滞简谐振动方程的解
式(6)中,当系统外激励p(t)为幅值p0、频率Ω的正弦简谐激励时,受迫动方程在理想条件和误差条件下可分别表示为
(14)
(15)
式(14)的通解为
x(t)=(AcosωDt+BsinωDt)exp(-ξωt)+
(16)
式中,β=Ω/ω.
设式(15)的特解为
式中
G=[1-β2-η+αηcos(Ωτ)]2+
[-2ξβ+αηsin(Ωτ)]2
G1sinΩt+G2cosΩt
(17)
式中
A=x(0)-G2
当系统外激励为随机信号时,可先将随机信号通过傅里叶变换分解为不同频率的正弦信号,并依次采用式(17)得到各频率下计算位移理论解;然后,将各频率的理论解进行叠加,便可求出实时混合模拟在随机信号下的响应.
3.4幅值比率误差和时滞的影响
由式(16)和(17)可知,实时混合模拟中α,τ对数值子结构的位移峰值和稳态振幅均产生影响,且试验子结构刚度比例η越大,影响越明显.
令ρ为在误差条件和理想条件下数值子结构稳态振幅的比值.α,τ对ρ的影响见图6.由图可知,随着α和τ的增大,ρ也逐渐增大.
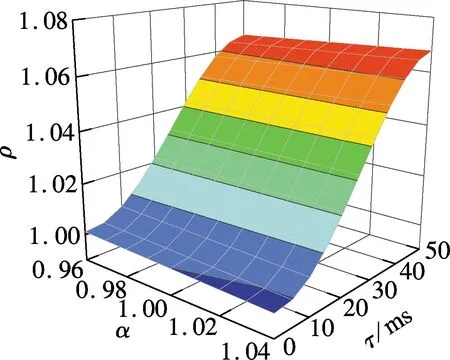
图6 α,τ对ρ的影响
图7显示了误差条件下数值子结构位移正、负峰值与其在理想条件下的差值Δ+p和Δ-p.由图可知,随着α和τ的增大,Δ+p逐步增大;随着α的减小和τ的增大,Δ-p逐步减小.
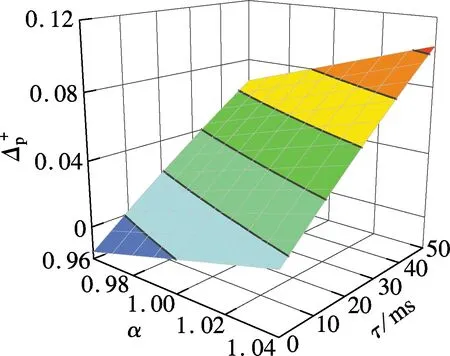
(a) 正峰值误差
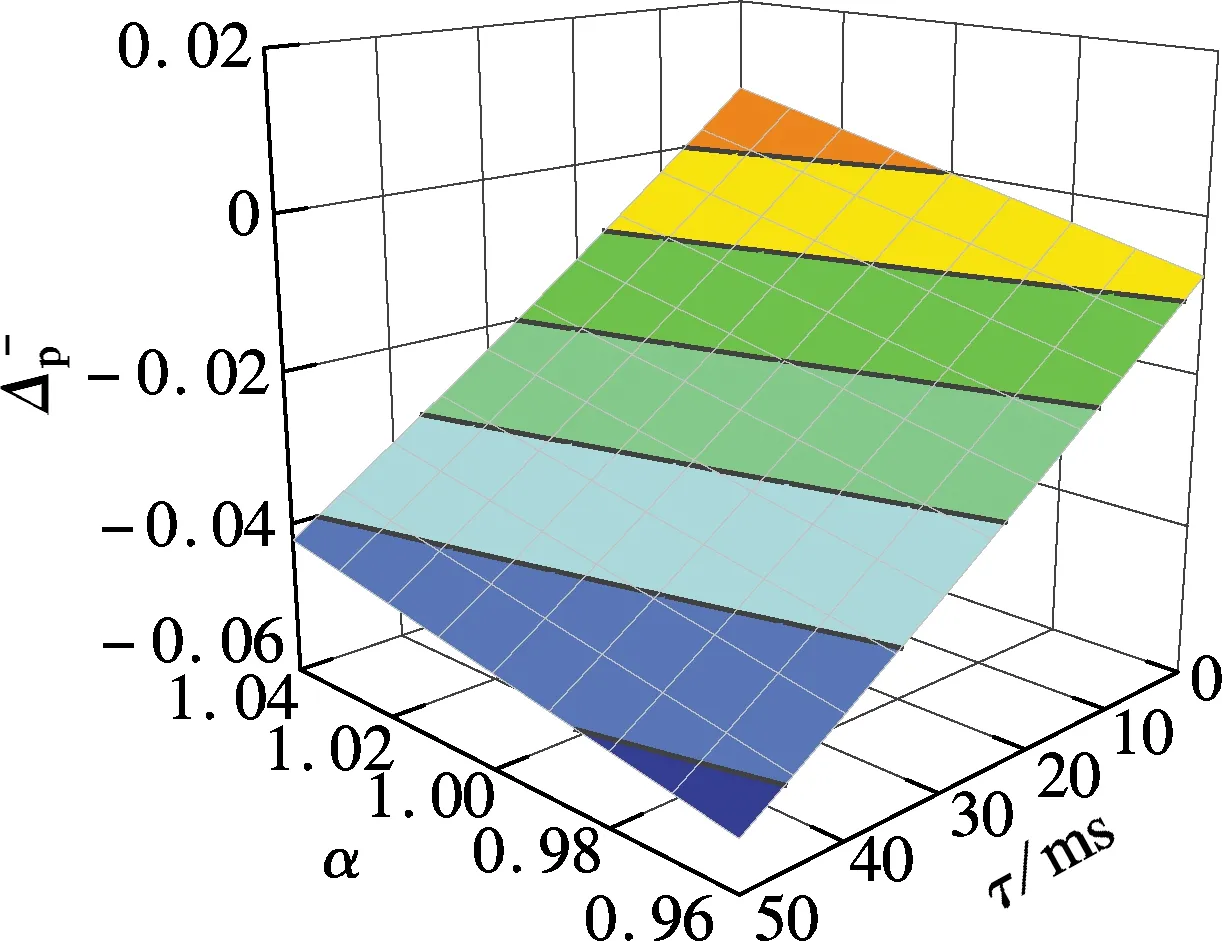
(b) 负峰值误差图7 峰值误差图
4 误差影响分析
试验中误差α和τ影响了试验结果的可靠性.本节将理论计算和数学模拟分析结果与试验数据进行对比.采用Matlab软件中Simulink模块进行数学模拟,流程图见图8.
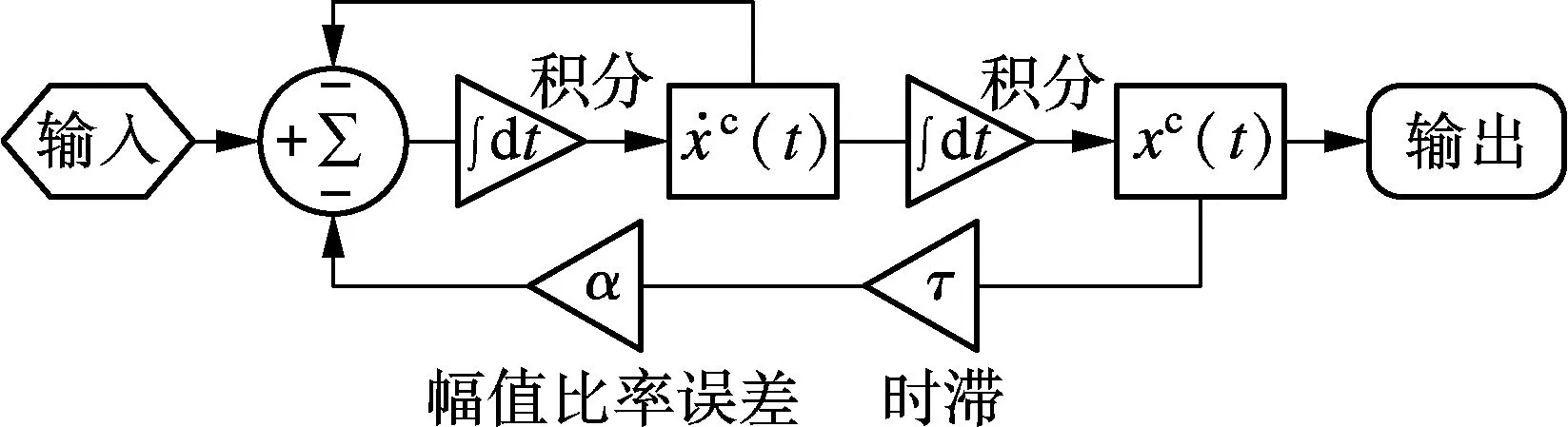
图8 Simulink模块流程图

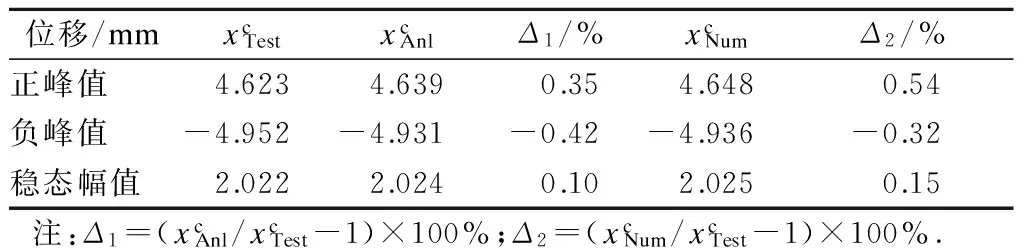
表3 计算位移分析表
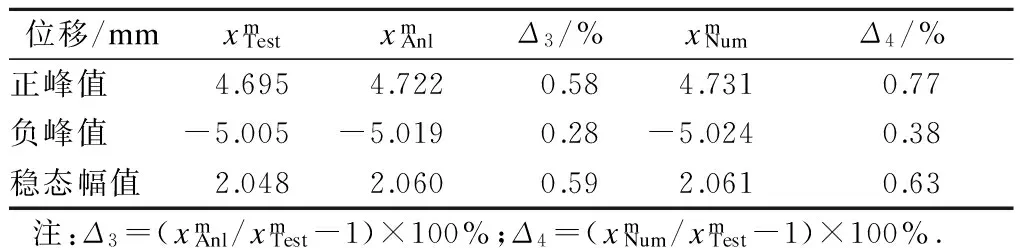
表4 测量位移分析表

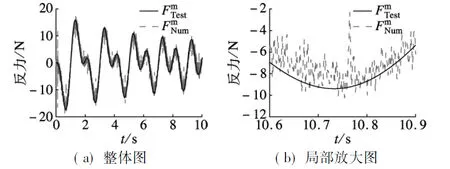
图10 正弦波Ω3激励下反力测量值与模拟值对比
理想条件下数值子结构位移x的正、负峰值分别为4.615和-4.914 mm,稳态振幅为2.024 mm.由表3可知,试验中α和τ使数值子结构位移峰值略微增大,稳态幅值基本保持不变.由于试验子结构刚度比率η较小,误差对数值子结构影响较小.试验子结构受到α,τ的影响,使作用在试验子结构上的外力严重失真,影响了试验子结构材料性能的发挥,导致试验结果的可信度降低.因此,需在实时混合模拟试验中应用补偿方法来减少时滞效应,以提高试验结果的可靠性.
5 结语
本文选用弹簧为试验子结构,进行了单自由度体系实时混合模拟试验,观测到测量位移与计算位移之间存在着微小的幅值比率误差和时滞.误差使作用在试验子结构上的外力失真,同时影响了数值子结构的位移峰值和稳态振幅.因此,在实时混合模拟试验中应用补偿方法是必要的.文中假设在试验过程中α和τ处处相等,采用时滞微分方程建立了实时混合模拟数学模型,并给出了微时滞下方程的近似解.分析表明,该数学模型较为合理,模拟结果较为准确.理论分析与试验结果之间的误差受假设简化、测量噪声、累积误差等因素的影响.
References)
[1]Nakashima M, Kato H, Takaoka E. Development of real-time pseudo dynamic testing[J].EarthquakeEngngStructDyn, 1992, 21(1):79-92. DOI:10.1002/eqe.4290210106.
[2]陈永盛, 吴斌, 王贞, 等. 基于Simulink的混合试验系统及其验证[J]. 振动与冲击, 2014, 33(7): 18-23. DOI:10.13465/j.cnki.jvs.2014.07.004.
Chen Yongsheng, Wu Bin, Wang Zhen, et al. Simulation and validation of a hybrid testing system with Simulink[J].JournalofVibrationandShock, 2014, 33(7): 18-23. DOI:10.13465/j.cnki.jvs.2014.07.004. (in Chinese)
[3]Horiuchi T, Inoue M, Konno T, et al. Real-time hybrid experimental system with actuator delay compensation and its application to a piping system with energy absorber[J].EarthquakeEngngStructDyn, 1999, 28(10):1121-1141. DOI:10.1002/(sici)1096-9845(199910)28:10<1121::aid-eqe858>3.3.co;2-f.
[4]Chung J, Hulbert G M. A time integration algorithm for structural dynamics with improved numerical dissipation: The generalized-α method[J].JournalofAppliedMechanics, 1993,60(2):371-375. DOI:10.1115/1.2900803.
[5]Guo T, Chen C, Xu W, et al. A frequency response analysis approach for quantitative assessment of actuator tracking for real-time hybrid simulation[J].SmartMaterStruct, 2014, 23(4):045042. DOI:10.1088/0964-1726/23/4/045042.
[6]Mercan O. Analytical and experimental studies on large scale real-time pseudo dynamic testing[D]. Bethlehem, PA, USA: Department of Civil and Environmental Engineering,Lehigh University, 2007.
[7]Clough R W, Penzien J.Dynamicsofstructures[M]. New York: McGraw-Hill, 1975: 9-32.
[8]Carrion J, Spencer B F. Real-time hybrid testing using model-based delay compensation[J].SmartStructuresandSystems, 2006,4(6):809-828. Taibei,China,2006: 299.
[9]内藤敏机,原惟行,日野义之, 等. 时滞微分方程——泛函微分方程引论[M]. 马万彪,等译. 北京:科学出版社, 2013:21-27.
[10]魏骏杰,王洪滨,蒋卫华. 时滞微分方程的分支理论及应用[M]. 北京:科学出版社, 2012:22-34.
Theoretical analysis and experimental verification of errors in real-time hybrid simulation
Huang LiangGuo TongXu Weijie
(Key Laboratory of Concrete and Pre-stressed Concrete Structures of Ministry of Education, Southeast University, Nanjing 210096, China)
To investigate the influences of the amplitude ratio error and the time delay on the results in real-time hybrid simulation (RTHS), an experiment, taking a spring as the experimental substructure, was conducted and the micro errors between the measured displacements and the calculated displacements were observed and analyzed. Assuming that the amplitude ratio error and the time delay were constant in the experiment, a RTHS mathematical model was developed by using the time delay differential equations, and the approximate solutions of the micro time delay formulas in free and simple harmonic vibration were derived, respectively. The results show that theoretical results and the experimental results are similar, proving the rationality and the accuracy of the mathematical model. The errors distort the force acting on the experimental substructure, and affect the peak displacement and the steady amplitude of the numerical substructure. The micro errors between the theoretical results and the experimental results are affected by simplified assumption, measured noise, accumulative errors and so on.
real-time hybrid simulation; time delay differential equation; error analysis; amplitude ratio error; time delay
10.3969/j.issn.1001-0505.2016.05.025
2015-12-28.作者简介: 黄亮(1986—),男,博士生; 郭彤(联系人),男,博士,教授,博士生导师,guotong@seu.edu.cn.
江苏高校优势学科建设工程资助项目(1105007002).
TU317.2
A
1001-0505(2016)05-1045-06
引用本文: 黄亮,郭彤,徐伟杰.实时混合模拟误差的理论分析及试验验证[J].东南大学学报(自然科学版),2016,46(5):1045-1050. DOI:10.3969/j.issn.1001-0505.2016.05.025.
