分布式驱动电动汽车的平方根容积卡尔曼滤波状态观测
2016-10-24金贤建殷国栋陈建松
金贤建 殷国栋 陈 南 陈建松 张 宁
(1东南大学机械工程学院, 南京 211189)(2俄亥俄州立大学机械与航空系, 美国哥伦布 43210)
分布式驱动电动汽车的平方根容积卡尔曼滤波状态观测
金贤建1,2殷国栋1陈南1陈建松1张宁1
(1东南大学机械工程学院, 南京 211189)(2俄亥俄州立大学机械与航空系, 美国哥伦布 43210)
针对车辆动力学系统状态估计的非线性问题,引入非线性动态Dugoff轮胎模型来构建包括纵向、侧向、横摆和侧倾等8自由度的非线性车辆动力学状态估计系统.在融合车载多传感器信息的基础上设计了车辆动力学的平方根容积卡尔曼非线性滤波状态观测器,对质心侧偏角、轮胎侧向力等关键状态进行观测.在Matlab/Simulink环境中搭建了Simulink-Carsim分布式驱动电动汽车系统状态估计联合仿真平台,采用双移线工况对观测器的可行性和有效性进行仿真验证.结果表明:传统的扩展式卡尔曼滤波状态观测器在车辆经历高侧向加速度过程中的观测值大幅偏离车辆运行状态的真实值,而设计的平方根容积卡尔曼非线性滤波状态观测器在整个双移线仿真工况下观测结果平稳,能实时反映车辆动力学系统的真实非线性运行状态,具有更小的观测误差和更高的观测精度.
电动汽车;状态观测;平方根容积卡尔曼滤波;车辆动力学
准确而实时地获得汽车行驶过程中的状态信息是实现车辆底盘动力学主动安全控制的前提与基础.分布式驱动电动汽车使用轮毂电机直接驱动4个车轮,以线控系统取代传统的机械传动连接和液压部件,能迅速获取电动车辆的驱动、转向、制动信号,有效地拓展了传统车辆信息的感知范围,更易实现车辆重要状态的在线观测或估计[1-3].
与广泛使用的Luenberper、最小二乘、传统卡尔曼等车辆线性状态观测器相比[2-4],近年来不同的非线性估计方法如扩展卡尔曼滤波(EKF)、无味粒子滤波(PF)、无迹卡尔曼滤波(UKF)等不断开始在车辆动力学状态估计中得到应用[5-8].Arasaratnam等[9]提出一种全新的容积卡尔曼(cubatureKalmanfilter,CKF)非线性算法,其核心是采用三阶球面-相径容积规则对高斯加权积分进行近似;与广泛使用的非线性EKF、UKF相比,CKF具有一系列显著的优点,其中,平方根容积卡尔曼(squarerootCKF,SCKF)采用平方根滤波的思想进行递推更新,可以降低计算的复杂度,有效地提高了滤波的实时性、精度和稳定性,具有广阔的应用前景[10].本文针对分布式驱动电动汽车系统状态估计的非线性问题,在融合车载多传感器信息的基础上采用平方根容积卡尔曼非线性滤波状态观测器来观测车辆运行状态.
1 非线性车辆动力学系统模型
1.18自由度整车动力学模型
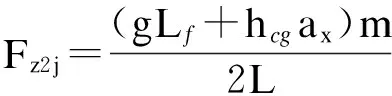
如图1所示,定义车辆坐标系的原点位于整车质心(CG)处,RC为车辆的侧倾中心;假设忽略车辆的垂向与俯仰运动,并将悬架简化为仅沿垂直方向作用的等效弹簧和减震器,忽略车轮外倾角和回正力矩对整车动力学性能的影响,建立包括车辆纵向、侧向、横摆、侧倾运动和4个车轮的回转运动在内的分布式驱动电动汽车8自由度整车非线性动力学模型.根据达朗伯原理[4-5,8],可得到如下整车的动力学方程:


(1)
(2a)
(3)
(4)
(5a)
(5b)
式中,∑Mz为车辆横摆合力矩;∑Mx为车辆前、后轴侧倾合力矩;Vg为质心速度;Vx,Vy分别为车辆质心的纵向和侧向速度;φ,φ和β分别是车辆质心的横摆、侧倾与侧偏角;δ为前轮转向角;Fxij,Fyij分别为第i,j轮的纵向、侧向力;m,ms分别为车辆质量与车辆簧载质量;musf,musr为前、后非簧载质量;hcg为质心高度;Izz为车辆横摆转动惯量;Ixz为车辆质量绕x,z轴的转动惯量积;Ixxs,Ixzs分别为车辆簧载质量绕x轴的转动惯量和绕x,z轴的转动惯量积;hrf,hrr分别为前、后侧倾中心高度;Kφf,Kφr为前、后侧倾刚度;Cφf,Cφr为前后侧倾阻尼系数;Bf,Br分别为前轮距和后轮距;g为重力加速度;ax,ay分别为车辆质心的纵向和侧向加速度;L为轴距;Lrs,Lfs分别为前、后车辆簧载质量到质心的距离;huf,hur分别为前、后非簧载质量的质心高度.
图1 8自由度非线性车辆动力学模型
1.2非线性动态轮胎模型
目前,魔术公式(magic formula,MF)模型与Dugoff 轮胎模型是2种广泛应用的非线性半经验轮胎模型,本文选择对经验参数依赖性较小的Dugoff非线性轮胎模型[1,2-8],即
(6)
(7)
式中,Cxij,Cyij为轮胎纵向、侧向刚度;εf,εr为前、后侧倾转向系数;μ为路面附着系数;Rw为轮胎半径;ωij为轮胎角速度;λij为滑移率.
式(6)、(7)建立的Dugoff非线性轮胎模型更适应于静态工况.为了较好地逼近轮胎的非线性特性,本文在静态非线性轮胎的基础上引入松弛因子σij,来描述非线性轮胎的时滞效应,从而得到能反映轮胎瞬时特性的非线性动态轮胎模型[4,7],即
(8)
2 非线性车辆状态观测器
为设计平方根容积卡尔曼非线性滤波状态观测器,首先在选取车辆信息测量的基础上建立非线性车辆SCKF观测器的状态方程与观测方程.对于分布式驱动电动汽车的标准车载传感器,除具有传统汽车车载传感器能测量的惯性量信息外,还具有轮毂电机自带的传感器能直接精确测量车轮角速度和更容易获取主动转向系统转角信号等优点.这里选择4个车轮的角速度、方向盘转角、质心侧倾角速度、横摆角速度、纵向加速度与侧向加速度作为测量量,根据车辆动力学方程式(1)~(8),可推导出如下非线性车辆SCKF观测器的状态方程与观测方程:
(9)
式中,非线性状态方程函数f(·)与观测方程函数h(·)分别为
(10)
式中,fl=ΠlΩl,l=1,2,…,12,13.
Π11=Π7,Π12=Π8,Π13=Π9
h1=Π4Ω14,h2=Π4Ω15,hq=xqq=3,4,…,8
Ω1=(Ixxs-msh)[(x6sinu1-x10cosu1+x11cosu1-x7sinu1)Bf/2-
(x10sinu1+x6cosu1+x11sinu1+x7cosu1)Lf+(x13-x12)Br/2+
(x9+x8)Lr]+IxzsIxz[(x6+x7)cosu1-(x6+x7)sinu1+
x8+x9+mshgx3-(Cφf+Cφr)x2-(Kφf-Kφr)x3]
Ω2=Ixzs[(x6sinu1-x10cosu1+x11cosu1-x7sinu1)Bf/2-
(x10sinu1+x6cosu1+x11sinu1+x7cosu1)Lf+(x13-x12)Br/2+(x9+x8)Lr]+Izz[(x6+x7)cosu1-
(x6+x7)sinu1+x8+x9+mshgx3-
(Cφf+Cφr)x2-(Kφf-Kφr)x3]
Ω3=1
Ω4=(x10+x11)cos(x5-u1)+(x12+x13)cosx5+(x6+x7)·
sin(x5-u1)-mshx1x2cosx5+(x8+x9)sinx5+mshf2sinx5
Ω5=(x6+x7)cos(x5-u1)+(x8+x9)cosx5-(x10+x11)·
sin(x5-u1)-mshx1x2sinx5-(x12+x13)sinx5+
mshf2cosx5-mx4Π14
在上述状态观测系统中,x(t),u(t)和z(t)分别为车辆非线性动力学观测器系统的状态矢量、输入矢量和量测矢量;w(t),v(t)分别为系统的过程噪音和量测噪音,两者为系统互不相关且均值为零的高斯白噪声,并且其过程噪音和量测噪音协方差矩阵Q(t)与R(t)选用0.01常系数的全维1矩阵,即

(11)
基于构建的非线性车辆SCKF观测器的状态方程与观测方程,参考文献[9-10]的SCKF原理,推导非线性车辆状态SCKF观测器算法流程如下:
1) 车辆状态SCKF观测器滤波初始化.使用三阶容积准则产生2n个基本容积点及对应的权值,即
(12)
式中,[I]i表示[I]中第i列向量,记单位向量为e={1,0,…,0}T,符号[I]表示对e中元素进行全排列和取反所生成的完全对称点集组成的2n维向量;ξi为第i个容积点;wi为第i个容积点的权重.

(13)
计算车辆状态向量的一步预测值
(14)
计算一步车辆状态预测误差协方差矩阵的平方根因子
(15)
式中,SQ,k-1为k-1时刻对Q矩阵进行因式分解得到的矩阵.
3) 车辆状态量测更新.进一步计算车辆状态量测容积点集与传导容积点集
Zi,k|k-1=h(Xi,k|k-1,uk-1)
(16)
计算车辆状态测量的一步预测值
(17)
计算新息协方差矩阵的平方根因子
(18)
式中,SR,k为k时刻对矩阵R进行因式分解得到的矩阵.
计算交叉协方差矩阵
(19)
计算平方根容积卡尔曼滤波非线性状态观测器增益
(20)
最后,更新当前时刻的状态向量,得到当前时刻非线性车辆状态的最优估计值为
(21)
同时更新误差协方差矩阵的平方根因子
Sk|k=tria([χk|k-1-Wkηk|k-1,WkSR,k])
(22)
3 仿真与分析
为验证观测器的可行性和有效性,在Matlab/Simulink环境中首先搭建Simulink-Carsim分布式驱动电动汽车系统状态估计联合仿真平台;为评估观测器对车辆非线性状态的观测效果,EKF观测器与设计的SCKF观测器的车辆状态矢量、输入矢量和车辆信息测量量完全一致.在仿真中,车辆的运行工况采用典型双移线工况,设计的观测器能观测不同车速下的车辆状态,考虑到低速分布式驱动电动汽车的安全性,在仿真中设置车辆速度为高速90km/h,路面条件为高附着系数的沥青路面.整个双移线工况下的仿真观测对比结果如图2~图5所示.
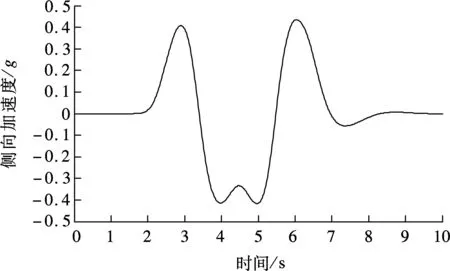
图2 车辆侧向加速度
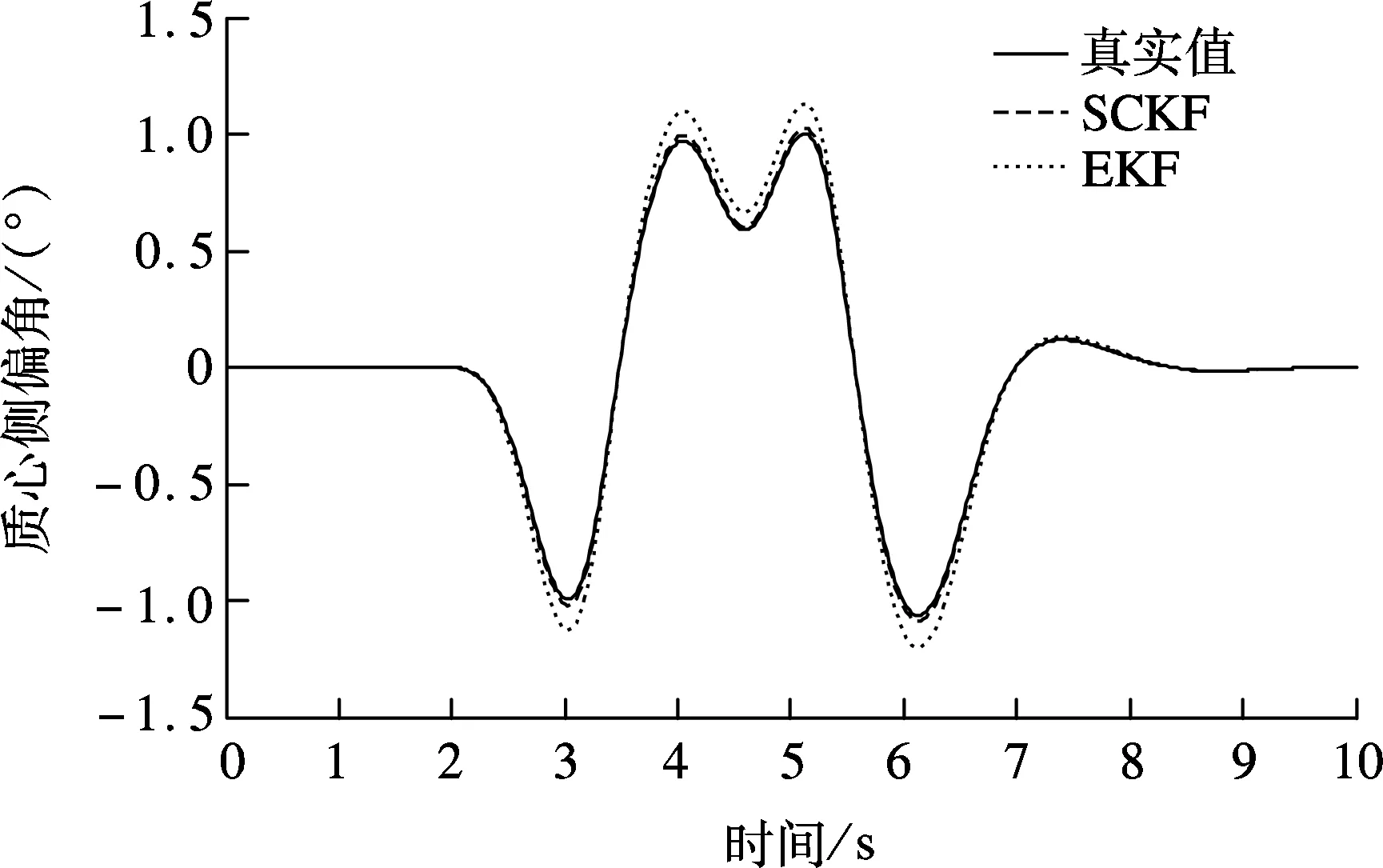
图3 车辆质心侧偏角观测对比
从车辆质心侧偏角(见图3)、车辆前左轮侧向力的跟踪观测图(见图4)可以看到,设计的SCKF在整个双移线仿真工况下观测结果平稳,SCKF对车辆状态的观测值与真实值基本一致.相比SCKF,EKF在整个双移线仿真工况下观测存在较大波动,尤其是在2.8~3.2s,3.7~5.3s和5.9~6.5s时间段内,EKF观测值大幅偏离车辆状态的真实值,能观测到较大的观测误差.这种现象可能是因为EKF对车辆动力学系统实行局部线性化带来了高阶截断误差.实际上,车辆在这些时段经历了高的侧向加速度,图2显示车辆最大侧向加速度达到0.45g,此时轮胎已处于非线性区域,整个车辆动力学系统呈现出强非线性特征.从图2可以看到,尽管SCKF在这些时段的观测值与真实值存在一定的偏差,但误差较小,说明SCKF观测器能有效地反映车辆非线性运作过程的真实状态,具有较高的观测精度,主要原因是SCKF是基于非线性滤波的观测算法,对非线性车辆动力学系统有更好的适应性.另外,从图5车辆前左、右轮侧向力对比观测图可以看到,车辆在双移线工况下,左、右轮的侧向力差异明显,反映了车辆在高速大转弯过程中存在横向载荷转移.
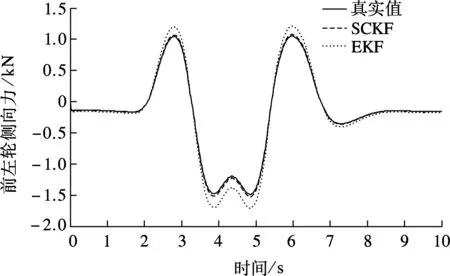
图4 车辆前左轮侧向力观测对比
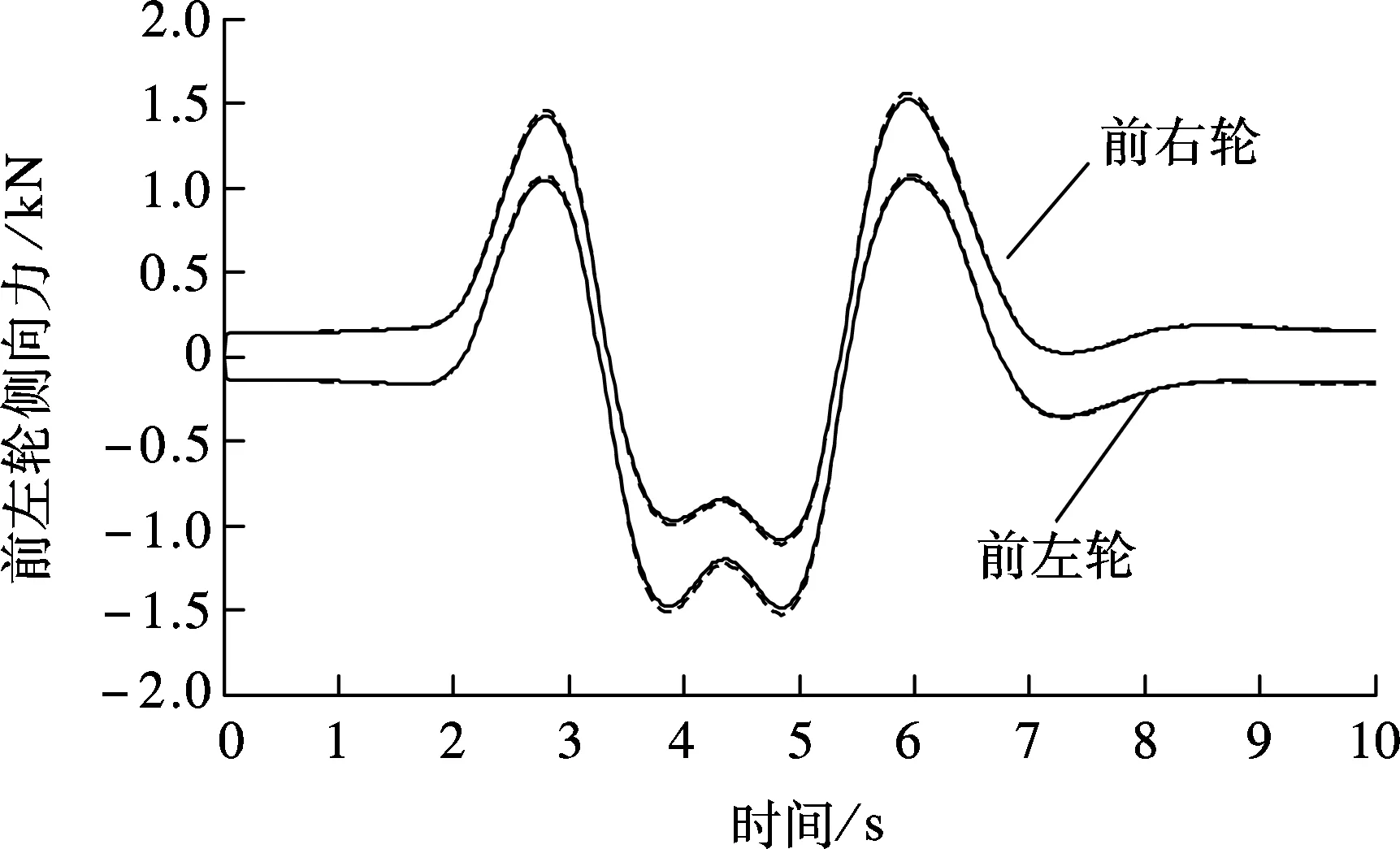
图5 车辆前轮左、右轮侧向力对比
4 结语
本文探究了基于非线性动态轮胎模型的车辆动力学状态估计系统,采用平方根容积卡尔曼滤波非线性状态观测器来对轮胎侧向力、质心侧偏角等状态进行了观测,通过高速下的双移线工况对观测器的性能进行了评估,仿真结果表明提出的观测器的正确性与可行性,但由于理论研究与实际应用尚存在一些差异,因此,下一步的研究工作是搭建dSPACE硬件在环的车辆状态观测仿真平台,通过硬件在环仿真与实车试验来进一步验证观测器的实际应用效果.
< class="emphasis_italic">References
)
[1]GengC,MostefaiL,DenaïM,etal.Directyaw-momentcontrolofanin-wheel-motoredelectricvehiclebasedonbodyslipanglefuzzyobserver[J]. IEEE Transactions on Industrial Electronics, 2009, 56(5): 1411-1419.
[2]HuangX,WangJ.Lightweightvehiclecontrol-orientedmodelingandpayloadparametersensitivityanalysis[J]. IEEE Transactions on Vehicular Technology, 2011, 60(5): 1999-2011.DOI:10.1109/tvt.2011.2148135.
[3]NamK,OhS,FujimotoH,etal.EstimationofsideslipandrollanglesofelectricvehiclesusinglateraltireforcesensorsthroughRLSandKalmanfilterapproaches[J]. IEEE Transactions on Industrial Electronics, 2013, 60(3): 988-1000.DOI:10.1109/tie.2012.2188874.
[4]BaffetG,ChararaA,LechnerD,etal.Experimentalevaluationofobserversfortire-roadforces,sideslipangleandwheelcorneringstiffness[J]. Vehicle System Dynamics, 2008, 46(6): 501-520.DOI:10.1080/00423110701493963.
[5]ZongC,HuD,ZhengH.DualextendedKalmanfilterforcombinedestimationofvehiclestateandroadfriction[J]. Chinese Journal of Mechanical Engineering, 2013, 26(2): 313-324.DOI:10.3901/cjme.2013.02.313.
[6]ChuW,LuoY,DaiY,etal.In-wheelmotorelectricvehiclestateestimationbyusingunscentedparticlefilter[J]. International Journal of Vehicle Design, 2015, 67(2): 115-136.DOI:10.1504/ijvd.2015.068134.
[7]AntonovS,FehnA,KugiA.UnscentedKalmanfilterforvehiclestateestimation[J]. Vehicle System Dynamics, 2011, 49(9): 1497-1520.DOI:10.1080/00423114.2010.527994.
[8]GuoH,ChenH,XuF,etal.ImplementationofEKFforvehiclevelocitiesestimationonFPGA[J]. IEEE Transactions on Industrial Electronics, 2013, 60(9): 3823-3835.DOI:10.1109/tie.2012.2208436.
[9]ArasaratnamI,HaykinS.CubatureKalmanfilters[J]. IEEE Transactions on Automatic Control, 2009, 54(6): 1254-1269.DOI:10.1109/tac.2009.2019800.
[10]TangX,LiuZ,ZhangJ.Square-rootquaternioncubatureKalmanfilteringforspacecraftattitudeestimation[J]. Acta Astronautica, 2012, 76: 84-94.DOI:10.1016/j.actaastro.2012.02.009.
StateobservationofdistributeddriveelectricvehicleusingsquarerootcubatureKalmanfilter
JinXianjian1,2YinGuodong1ChenNan1ChenJiansong1ZhangNing1
(1SchoolofMechanicalEngineering,SoutheastUniversity,Nanjing211189,China) (2DepartmentofMechanicalandAerospaceEngineering,TheOhioStateUniversity,Columbus43210,USA)
Todealwithnonlinearchallengesonvehicledynamicsstateestimation,theeight-DOF(degreeoffreedom)nonlinearvehicledynamicsstateestimationsystem,includinglongitudinal,lateral,yaw,androllmotionswasconstructedbyintroducinganonlineardynamicsDugofftiremodel.Basedonmulti-sensordatafusion,thenonlinearobserverwithsquarerootcubatureKalmanfilterwasdesignedtoestimatesomekeyparameters,suchaslateraltire-roadforcesandvehiclesideslipangle.Thentheco-simulationplatformwithSimulink-CarsimfortheestimatedsystemofdistributeddriveelectricvehicleswasbuiltinMatlab/Simulinkenvironment.Simulationsfordoublelanechangemanoeuvrewerecarriedouttoevaluatethefeasibilityandtheeffectivenessoftheobserver.TheresultsshowthattheobservedvalueswithtraditionalextendedKalmanfilterstateobserverdeviatefromtherealvaluesofthevehiclerunningstatewhenvehiclesdeliverhighlateralacceleration,whilethenonlinearobserverwiththeproposedsquarerootcubatureKalmanfilterhassmoothresultsandreflectsthereal-timenonlinearvehicledynamicsstateduringdoublelanechangemanoeuvre.Anditpossessessmallerobservererrorsandhigherobservationprecision.
electricvehicles;stateobservation;squarerootcubatureKalmanfilter;vehicledynamics
10.3969/j.issn.1001-0505.2016.05.016
2016-02-03.作者简介: 金贤建(1986—),男,博士生;殷国栋(联系人),男,博士,教授,博士生导师,ygd@seu.edu.cn.
国家重点研发计划资助项目(2016YFB0100906)、国家自然科学基金资助项目(51575103,51375086)、东南大学优秀博士学位论文基金资助项目(YBJJ1429).
:10.3969/j.issn.1001-0505.2016.05.016.
U461;TP273
A
1001-0505(2016)05-0992-05
引用本文: 金贤建,殷国栋,陈南,等.分布式驱动电动汽车的平方根容积卡尔曼滤波状态观测[J].东南大学学报(自然科学版),2016,46(5):992-996. < class="emphasis_italic">DOI
