分布式干扰下分布式雷达网目标跟踪技术
2016-10-24贺达超王国宏孙殿星
贺达超,王国宏,孙殿星
(海军航空工程学院 信息融合技术研究所,山东 烟台 264001)
分布式干扰下分布式雷达网目标跟踪技术
贺达超,王国宏,孙殿星
(海军航空工程学院 信息融合技术研究所,山东 烟台264001)
针对分布式干扰下雷达对目标的检测概率降低导致跟踪航迹不连续的问题,提出了一种分布式干扰下分布式雷达网目标跟踪技术。首先将组网各雷达跟踪滤波后的航迹数据上报到融合中心进行时空对准,然后在融合中心对分布式干扰下上报的不同航迹类型进行关联检验,最后对通过关联检验的航迹滤波融合。该技术能提高分布式干扰下目标跟踪航迹的连续性和稳定性,仿真结果证明了该技术的可行性和有效性。
分布式干扰;雷达组网;时空对准;目标跟踪;航迹关联;航迹融合
0 引言
分布式干扰将多个小型干扰设备部署在雷达的周围,利用其距离近、数量多、设备简单、生存能力强等优势对雷达进行干扰,干扰能量容易从雷达的主瓣进入,干扰信号易获得较大增益。在分布式干扰下,干扰机有效压制了雷达的探测区域,即便目标处于雷达探测区域内,由于信噪比下降,使雷达对目标的检测概率也会相应下降,出现目标暂消的现象,造成雷达对目标跟踪航迹不完整。因此,研究分布式干扰下雷达对目标的探测跟踪问题具有重要的理论价值与实际意义。
与单雷达相比,雷达网能够把多部不同体制、不同频段、不同程式、不同极化方式、不同地理位置配置的雷达组合成有机整体,并采用信息融合的方法充分利用各部雷达的资源,从而有效提高分布式干扰下对目标的探测跟踪能力[1-3]。文献[4]研究了分布式干扰下集中式雷达网对目标跟踪的相关问题,提出的基于数据压缩的多假设跟踪(multiple hypothesis tracking,MHT)算法能提高航迹寿命;文献[5]分析了雷达网在分布式干扰下的探测性能,对雷达网优化布站、干扰机配置、对抗训练等具有一定指导作用;文献[6]讨论了基于空间距离的集中式与分布式干扰鉴别,提出的集中式雷达网序贯滤波融合算法提高了航迹的连续性和稳定性。上述研究对分布式干扰下雷达网目标跟踪具有一定借鉴意义,然而实际的雷达网在对目标跟踪时,主要是各分站雷达将跟踪滤波后的航迹数据上报到融合中心进行处理,即采用的是分布式结构。分布式雷达网对系统的通信要求较低,可靠性高,能以较低的费用获得较高的可用性。
本文研究分布式干扰下分布式雷达网对目标的检测跟踪技术。组网各雷达首先在各自的局部直角坐标系中完成对目标的滤波跟踪,将航迹上报到融合中心后进行时空对准;然后在融合中心进行基于统计双门限的航迹关联检验;最后对关联航迹进行融合。仿真实验给出了不同干扰情况下的跟踪结果,证明了该技术在分布式干扰下能实现对目标的稳定跟踪。
1 分布式干扰下雷达量测模型
分布式干扰是将多个电子干扰设备分散配置在被干扰电子目标活动的区域,利用多干扰源实现空域、频域、时域互补,在空域上干扰信号能量易从天线主瓣进入雷达,不会受到低副瓣天线、旁瓣匿影或旁瓣对消等抗干扰技术的抑制,分布式干扰原理图如图1所示。

图1 分布式干扰原理图Fig.1 Distributed jamming principle diagram
1.1分布式干扰下雷达信干比的求解
雷达接收机输入端的信干比(目标回波信号功率与干扰功率加噪声功率之比)为
(1)
式中:接收机内部噪声功率N0为
N0=kT0BrF,
(2)
式中:k为玻耳兹曼常数(1.38×10-23J/K);T0为噪声温度(290 K);Br=1/τ为噪声带宽;F为噪声系数;τ为雷达脉宽。雷达收到的目标回波信号功率Prs为

(3)
式中:Pt,G0分别为雷达发射功率和天线增益;λ为雷达波长;σ为目标的雷达截面积;Rt为目标与雷达间的距离;Gp为综合考虑了相关处理、匹配接收等各种因素的增益。
分布式干扰条件下,假设n个性能完全相同的分布干扰单元,其发射功率为Pj,干扰机天线增益为Gj,雷达接收天线的功率增益为Gr,干扰机的系统损耗为Lj,第i个干扰机与雷达接收机天线之间的距离为Rji,则n个分布式干扰机对雷达接收机的干扰功率为

(4)
雷达检测概率的计算中,以目标起伏服从Swerling I型分布(慢起伏,瑞利分布)为例进行分析,由文献[7]可直接得到目标的检测概率。
1.2雷达量测模型
分布式干扰下,由于信噪比下降,雷达对目标的检测概率也会相应下降,因此,本文采用文献[8]提出的量测模型,该模型用方程表示为

(5)

2 雷达网航迹关联检验
对于分布式雷达网,各雷达先在自身的局部直角坐标系中对多目标完成跟踪滤波。关于单雷达的多目标跟踪,已有的如联合概率数据互联算法及其改进算法[9-11]等有较好的效果,具有一定的工程应用价值,在此不再详述。组网各雷达将滤波形成的航迹上报到融合中心进行处理之前,首先要进行时空对准。现有的时间对准方法主要有最小二乘法、插值法、滤波法等[12-13],这些方法在多传感器的目标跟踪融合中均能实现时间同步。为了改善雷达网在三维空间对目标的跟踪性能,考虑地球曲率对实际的影响,在空间对准时将坐标系选为地心直角坐标系。文献[14]和[15]对分布式多传感器的航迹关联问题进行了较深入研究,然而都是基于目标的航迹是连续、完整的情况,下面讨论在分布式干扰下的雷达网航迹关联问题。
需要说明的是,本文只对作直线运动的目标航迹作讨论,对于目标做转弯机动的情况,由于受分布式干扰航迹情况更为复杂,将另文探讨。针对分布式干扰下雷达对目标跟踪可能出现航迹间断的特点,融合中心可能会出现以下4种情况,如图2所示。
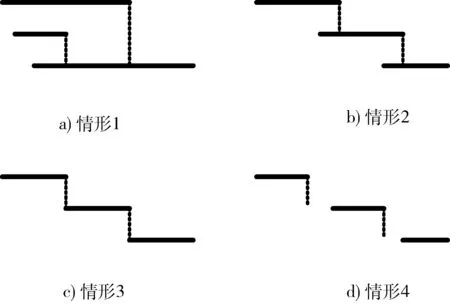
图2 融合中心上报航迹Fig.2 Tracks reported to fusion center
由分析知融合中心主要会出现两类航迹:第1类是可互补的,如图2中第1和第2种情形所示;第2类是不可互补的,如图2中第3和第4种情形所示。在融合中心对航迹进行关联检验之前,可以利用目标的先验运动特征信息如航向、速度区间和加速度范围等对航迹数据做粗关联,排除部分无关联可能的航迹,简化航迹关联的运算量。基于目标运动特征信息可设置如下的粗关联判决:
航向和速度匹配:目标的航向即为速度方向,且目标的位移与时间的比值满足目标速度门限。

(6)
加速度匹配:目标速度变化率小于加速度门限。

(7)
式中:l为间隔步长;T为雷达采样周期。
在完成航迹粗关联之后,下面分别介绍对于2类航迹的关联检验准则。
2.1第1类航迹关联检验


(8)

(9)
状态估计的差为

(10)
真实状态的差值为
Δij(k)=Xi(k)-Xj(k).
(11)
可构造如下假设:
H0∶Δij(k)=0,2个状态来自同一目标;
H1∶Δij(k)≠0,2个状态来自不同目标。
为验证上述假设,设:

(12)
αij(k)的均值为0,协方差为
Pij(k)=E[αij(k)αij(k)T]=
Pi(k)+Pj(k),
(13)
式中:Pi(k)和Pj(k)分别为k时刻Xi(k)和Xj(k)对应的协方差,由于真实值无法获得,用估计值代替。
定义估计误差之间的距离:
Dijαij(k)[Pij(k)]-1αij(k)T.
(14)
由文献[16]知,Dij服从自由度为nz的卡方分布,nz是状态向量的维数。从而,可得航迹关联检验的判决准则为
统计双门限准则的第2门限,是在雷达i和j中选取时间对齐之后长度相等的R个状态样本逐个进行第1门限检验,若判断某个状态样本接受H0,则计数器t加1,否则计数器值不变。经过R次χ2分布的关联检验后,将计数器的值t与第2门限L比较,若t>L,即R个样本中满足第1门限的样本数大于第2门限,则判决两条航迹关联。否则,判决两条航迹不关联。若雷达i的一条航迹按照上述双门限判决准则同时和雷达j的多条航迹关联,首先通过比较关联次数,取关联次数较多的那条为关联航迹;若关联次数也相同,则取总的统计关联距离较小的那条为关联航迹。考虑到雷达网受到分布式干扰,各雷达上报的航迹包含的状态估计数量可能不同,时间对齐之后参与第2门限检验的样本数量也不一样,因此,第2门限的选择是动态的,根据参与关联航迹的特点,L/R的数值可选2/3,3/4,4/5,6/8等。
2.2第2类航迹关联检验


(15)


m=1,2,...,R,
(16)

m=1,2,...,R,
(17)


(18)

(19)
至此,可以采用对第1类航迹的关联方法来对第2类航迹进行关联判决。之所以要对雷达i的航迹Ti作预测的同时对雷达j的航迹Tj作反向外推,一方面是因为航迹的起始阶段滤波精度较差,作反向外推能减小误差;另一方面是因为单方向的预测或者外推步数越多误差越大。
3 关联航迹融合

状态融合

(20)
协方差融合

(21)

根据目标的运动状态,可以选择不同阶的多项式进行拟合。
在融合中心根据各雷达上报航迹的类型可以采用上述相应的关联判决方法,完成雷达i和雷达j的航迹关联后,将航迹进行融合处理,再将融合后的航迹与组网其余雷达的航迹依次按照上述方法完成关联和融合,直至完成整个雷达网的关联融合计算。
4 仿真结果及分析
4.1仿真环境
以防空组网雷达系统为背景,这里以3部雷达跟踪编队目标为例进行仿真分析。该组网雷达系统包括3个雷达站,各站的地理坐标(纬度、经度和海拔高度)分别为:雷达站1(N26.5°,E29.5°,300 m),雷达站2(N27.5°,E30°,300 m),雷达站3(N27.5°,E29.2°,300 m);每部雷达附近有一部分布式干扰机,干扰机的地理坐标分别为:干扰机1(N26.2°,E30°,5 000 m),干扰机2(N27.5°,E30.5°,5 000 m),干扰机3(N27.9°,E29.4°,5 000 m);编队目标为组网雷达上空10架作匀速直线运动的飞机,其地理坐标为(N26.55°—N26.73°,E30°,8 000 m),目标在同一经度和海拔高度,纬度间隔为0.02°,在以雷达1为基准的局部直角坐标系中速度为(250,-300,-4)m/s;组网雷达在分布式干扰下对目标进行观测,各雷达性能参数分别为发射功率Pt1=Pt2=Pt3=10 kW;脉冲宽度τ1=τ2=τ3=1×10-6s;天线均为3 m×1 m的矩形口径,天线噪声温度Ta1=Ta2=Ta3=1 000 K,天线效率e1=e2=e3=0.8;接收机增益Gp1=Gp2=Gp3=20 dB;虚警概率Pfa1=Pfa2=Pfa3=1×10-6;雷达采样时间间隔Tr1=1 s,Tr2=2 s,Tr3=4 s;测距标准差σρ1=100 m,σρ2=150 m,σρ3=200 m;测方位角标准差σθ1=0.1°,σθ2=0.2°,σθ3=0.3°;测俯仰角标准差σθ1=0.1°,σθ2=0.2°,σθ3=0.3°。干扰带宽BJ1=BJ2=BJ3=10 MHz;干扰机在雷达方向上增益GJ1=GJ2=GJ3=3 dB。
为了模拟融合中心出现的不同航迹类型,进行2次不同的仿真实验。仿真实验1将干扰机功率设置较小,设分布式干扰机发射功率PJ1=PJ2=PJ3=500 W;仿真实验2加大干扰机功率,设分布式干扰机发射功率PJ1=PJ2=PJ3=2 000 W。航迹关联检验第1门限取显著性水平α=0.005,第2门限的L/R数值分别取3/4和6/8两种情况,仿真时间500 s,仿真次数100次。
4.2仿真结果
仿真实验1
仿真结果如表1,图3~7所示。

表1 第1类航迹关联检验结果

图3 雷达网在地理坐标系下的威力范围和目标的真实轨迹 Fig.3 Radar network power range and the targets’real trace in geographic coordinate system

图4 组网各雷达对目标1的检测概率Fig.4 Detection probability of radar network to target 1
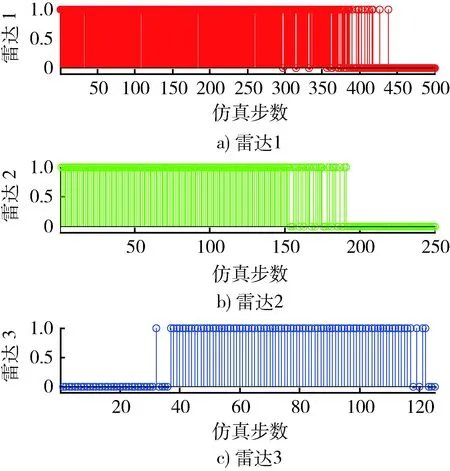
图5 组网各雷达对目标1的量测Fig.5 Measurements of radar network to target 1

图6 融合中心对目标1融合后的航迹Fig.6 Track after fusion to target 1 in fusion center

图7 融合中心和雷达1对目标1的位置均方根误差Fig.7 Position RMSE of fusion center and radar 1 to target 1
仿真实验2
仿真结果如表2和图8~12所示。

表2 第2类航迹关联检验结果
图3和图8分别为增大干扰功率前后的雷达网威力范围,其中,灰色区域为干扰前雷达网威力范围,绿色区域为干扰后雷达网威力范围,蓝色直线为目标在地理坐标系下运动的真实轨迹。为简化,只给出组网雷达对编队中目标1的仿真结果。图4和图9分别为增大干扰功率前后的组网各雷达对目标1的检测概率曲线;图5和图10分别为增大干扰功率前后的组网各雷达对目标1的量测,若雷达在干扰环境下能检测到目标,显示为1,否则,显示为0;图6和图11分别为增大干扰功率前后融合中心对目标1融合后的航迹;图7和图12分别为增大干扰功率前后融合中心和雷达1分别对目标1的滤波位置均方根误差。
4.3仿真结果分析
(1) 由表1和表2可以看出,一类航迹关联检验的正确率明显高于二类航迹,且一类航迹关联检验的L/R数值取6/8比取3/4的正确关联率高4.6%,二类航迹关联检验的L/R数值取6/8比取3/4的正确关联率低10.5%,主要原因是二类航迹采用预测和反向外推误差较大,且间断时间越长误差越大,L/R的值要根据具体情况设置。

图8 雷达网在地理坐标系下的威力范围和目标真实轨迹Fig.8 Radar network power range and the targets’ real trace in geographic coordinate system

图9 组网各雷达对目标1的检测概率Fig.9 Detection probability of radar network to target 1
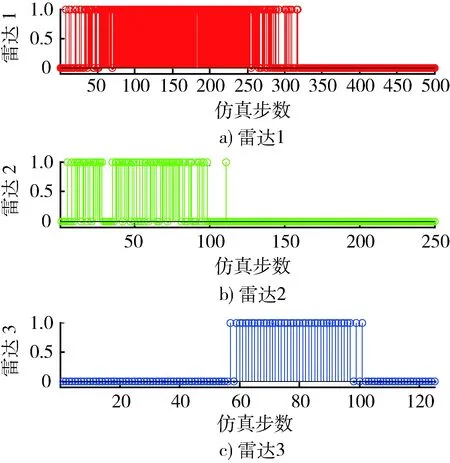
图10 组网各雷达对目标1的量测Fig.10 Measurements of radar network to target 1

图11 融合中心对目标1融合后的航迹Fig.11 Track after fusion to target 1 in fusion center
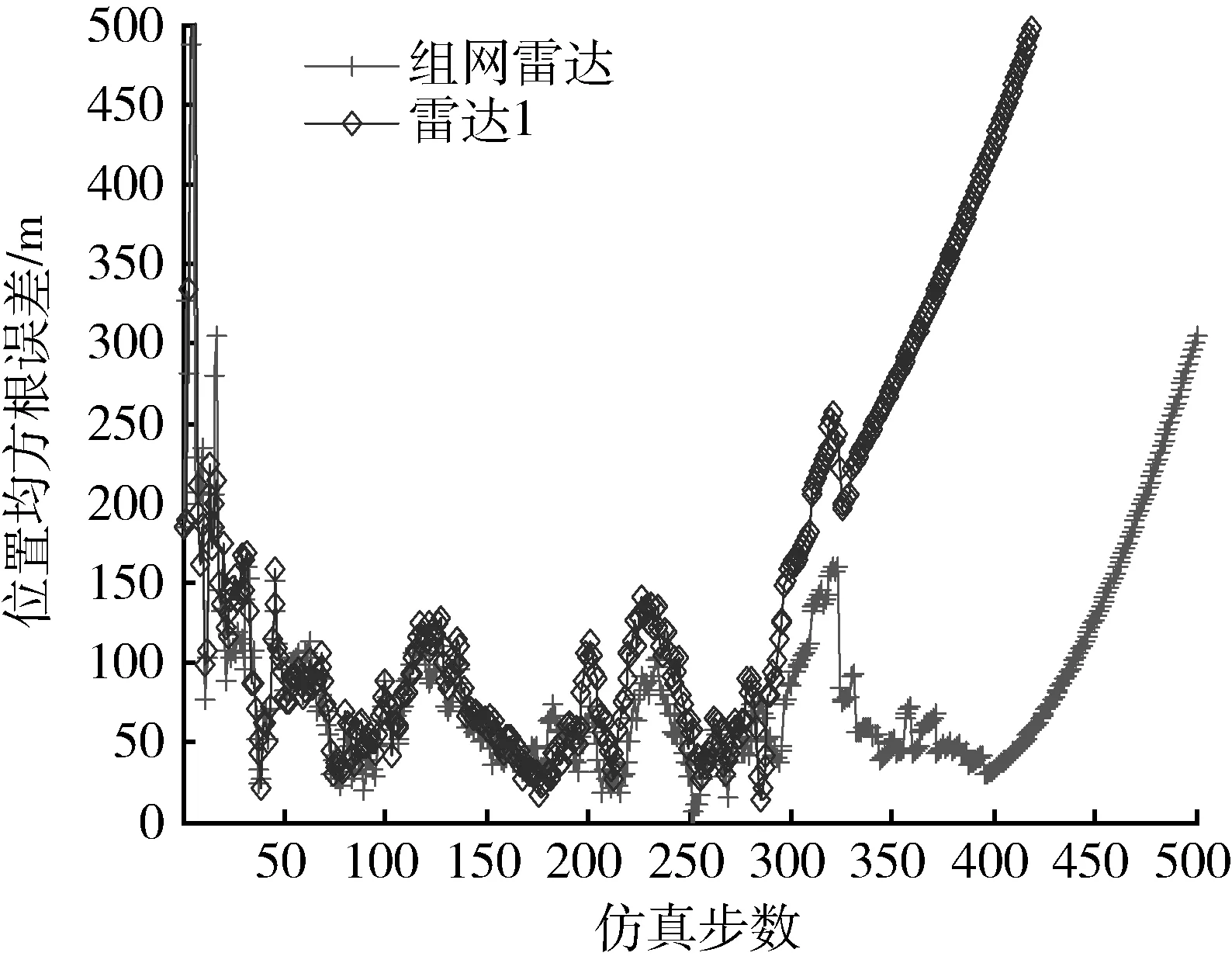
图12 融合中心和雷达1对目标1的位置均方根误差Fig.12 Position RMSE of fusion center and radar 1 to target 1
(2) 由图3和图8可以看出,雷达网受分布式干扰之后,有效探测区域减小,增大干扰功率后,被压制区域由34.74%上升到50.62%。
(3) 由图4,5,9和10可知,雷达网在分布式干扰下,检测概率下降,单部雷达的航迹不完整,雷达组网后能实现航迹互补;随着干扰功率变大,检测概率进一步降低,航迹质量也相应下降,严重时上报到融合中心的航迹将不能实现互补。
(4) 由图6,7,11和12分析得到,在分布式干扰下单雷达无法完成对目标的稳定跟踪,组网雷达能利用互补优势实现对目标的跟踪,且雷达网将各雷达分站上报到融合中心的航迹进行融合,能提高航迹精度;但随着干扰功率变大,雷达网跟踪精度变差。
(5) 由以上分析知,分布式干扰下融合中心航迹融合的质量主要取决于各雷达站上报的航迹质量,而各雷达站的航迹质量主要取决于雷达对量测数据的获取,雷达获取的量测信息越充分和完整,航迹也越完整,经融合之后能得到较高的跟踪精度。因此,最根本是要提高各雷达对目标的检测概率使量测信息更加充分,可考虑采取相应的抗干扰措施。
5 结束语
本文针对分布式干扰下雷达对目标的检测与跟踪问题,提出了分布式雷达网目标跟踪技术,该技术能充分发挥雷达组网的互补优势,在干扰环境下实现对目标的稳定跟踪。但随着雷达网受干扰程度加深,组网雷达对目标的跟踪精度下降,严重时甚至无法跟踪目标,这时需要雷达自身采取相应的抗干扰措施提高检测概率,使各雷达上报到融合中心的航迹趋于互补,才能实现对目标的跟踪。关于雷达抗干扰措施的选择和性能分析,可以从信号处理和数据处理两方面结合进行研究,这也是今后研究的一个方向。
[1]陈永光, 李修和, 沈阳.组网雷达作战能力分析与评估[M].北京:国防工业出版社,2006.
CHEN Yong-guang,LI Xiu-he,SHEN Yang.Analysis and Evaluation to Network Radar Engagement Abilities[M].Beijing:National Defense Industry Press,2006.
[2]HUNG D Ly,LIANG Qi-lian.Diversity in Radar Sensor Networks:Theoretical Analysis and Application to Target Detection[J].International Journal of Wireless Information Networks,2009,16(4):209-216.
[3]Hong-Sam T.Le,LIANG Qi-lian.Joint Multi-Target Information and Classifiction in Cognitive Radar Sensor Networks[J].International Journal of Wireless Information Networks,2011,18(2):100-107.
[4]徐海全, 王国宏, 关成斌.分布式干扰下的雷达网目标跟踪技术[J].兵工学报,2011,32(6):764-769.
XU Hai-quan ,WANG Guo-hong,GUAN Cheng-bin.Target Tracking Technique for Radar Network Under the Distributed Jamming[J].Acta Armamentarii, 2011,32(6):764-769.
[5]杨超, 徐江斌, 吴玲达.分布式干扰下雷达网探测能力的三维可视化[J].计算机工程,2011,37(1):19-21.
YANG Chao,XU Jiang-bin,WU Ling-da.3D Visualization on Radar Network Detection Ability under Distributed Jamming[J].Computer Engineering, 2011,37(1):19-21.
[6]李世忠, 王国宏, 吴巍, 等.分布式干扰下组网雷达目标检测与跟踪技术[J].系统工程与电子技术,2011,34(4):782-788.
LI Shi-zhong,WANG Guo-hong,WU Wei,et al.Detection and Tracking Technique for Radar Network in the Presence of Distributed Jamming[J].Systems Engineering and Electronics, 2011,34(4):782-788.
[7]Bassem R, Mahafza Ph.D. 雷达系统分析与设计(MATLAB版)[M].2版.北京:电子工业出版社,2008.
Bassem R, Mahafza Ph.D.Radar Systems Analysis and Design Using Matlab [M]. 2nd ed.Beijing:Publishing House of Electronics Industry,2008.
[8]王国宏, 李世忠, 白晶, 等.压制干扰下组网雷达目标检测与跟踪技术[J].宇航学报, 2012,33(12):1781-1787.
WANG Guo-hong,LI Shi-zhong,BAI Jing,et al.Target Detection and Tracking Technique for Radar Network in the Presence of Suppressive Jamming[J].Journal of Astronautics, 2012,33(12):1781-1787.
[9]何友, 修建娟, 张晶炜, 等.雷达数据处理及应用[M].北京:电子工业出版社,2006.
HE You,XIU Jian-juan,ZHANG Jing-wei,et al.Radar Data Processing with Applications[M].Beijing:Publishing House of Electronics Industry,2006.
[10]尹帅, 袁俊泉, 吴顺华, 等.改进的JIPDA多目标跟踪算法[J].雷达科学与技术,2014,12(3):285-290.YIN Shuai,YUAN Jun-quan,WU Shun-hua,et al.An Improved JIPDA Algorithm for Multi-Target Tracking[J].Radar Science and Technology, 2014,12(3):285-290.
[11]张晶炜, 熊伟, 何友.几种简化联合概率数据互联算法性能分析[J].系统工程与电子技术,2005,27(10):1807-1810.
ZHANG Jing-wei,XIONG Wei,HE You.Analysis to a Few Simplified Aigorithms Based on Joint Probabilistic Data Association[J]. Systems Engineering and Electronics, 2005,27(10):1807-1810.
[12]张艳艳, 董普靠, 高恒.组网雷达时空对准方法[J].火控雷达技术,2013,42(2):15-18.
ZHANG Yan-yan,DONG Pu-kao,GAO Heng.Time-Space Alignment Method for Radar Netting[J].Fire Control Radar Technology, 2013,42(2):15-18.
[13]梁凯, 潘泉, 宋国明, 等.多传感器时间对准方法的研究[J].陕西科技大学学报,2006,24(6):111-114.
LIANG Kai,PAN Quan,SONG Guo-ming,et al.The Study of Multi-Sensor Time Registration Method[J].Journal of Shaanxi University of Science & Technology, 2006,24(6):111-114.
[14]韩红, 刘允才, 韩崇昭, 等.多传感器融合多目标跟踪中的序贯航迹关联算法[J].信号处理,2004,20(1):30-34.
HAN hong,LIU Yun-cai,HAN Chong-zhao,et al.Sequential Track-Association Algorithm in Multi-Target Tracking System by Using the Multi-Sensor Information Fusion[J].Signal Processing, 2004,20(1):30-34.
[15]赵艳丽, 陈永光, 蒙洁, 等.分布式组网雷达抗多假目标欺骗干扰处理方法[J].电光与控制,2011,18(3):25-30.
ZHAO Yan-li,CHEN Yong-guang, MENG Jie, et al.A Data Processing Method Against Multi-False-Target Deception Jamming for Distributed Radar Network[J].Electronics Optics & Control,2011,18(3):25-30.
[16]张尧庭,方开泰.多元统计分析引论[M].武汉:武汉大学出版社,2013.
ZHANG Yao-ting,FANG Kai-tai.An Introduction to Multivariate Satatistical Analysis[M].Wuhan:Wuhan University Publishing House,2013.
Target Tracking Technique for Distributed Radar Network Under Distributed Jamming
HE Da-chao, WANG Guo-hong, SUN Dian-xing
(Naval Aeronautical Engineering Institute,Institute of Information Fusion Technology, Shandong Yantai 264001, China)
Under distributed jamming, radar tracking is discontinuous due to low detection probability, and a target tracking technique for distributed radar network is proposed. Firstly, transforming the tracks of radar network to fusion center and completing the time-space alignment. Then, association and inspection are made for different types of track in the fusion center of radar network. Finally, the tracks passed the inspection are fused. The technique can enhance continuity and stability of radar network target tracking under distributed jamming. Simulation results verify the feasibility and validity of the proposed technique.
distributed jamming;radar network;time-space alignment;target tracking;track association;track fusion
2015-08-15;
2015-10-22
国家自然科学基金(61002006;61102165;61102167);“泰山学者”建设工程专项经费资助课题
贺达超(1990-),男,湖南怀化人。硕士生,主要研究方向为多传感器信息融合、雷达组网。
通信地址:311201浙江省杭州市萧山区域厢街道萧然南路156号E-mail:676796198@qq.com。
10.3969/j.issn.1009-086x.2016.04.014
TN973;TN958
A
1009-086X(2016)-04-0081-08