高空大跨度钢结构液压提升施工技术
2016-10-19黄凯张文博刘文田凯
□文/黄凯 张文博 刘文 田凯
高空大跨度钢结构液压提升施工技术
□文/黄凯 张文博 刘文 田凯
超大型构件液压同步提升施工技术,采用液压提升器作为提升机具,柔性钢绞线作为承重索具,液压提升器为穿芯式结构,以钢绞线作为提升索具。文章通过在南港工业区投资服务中心项目的成功推广应用,充分体现了其安全、可靠、承重件自身重量轻、运输安装方便、中间不必镶接等一系列独特优点。
液压;同步提升;高空;大跨度;钢结构
1 工程概况
南港工业区投资服务中心高层塔楼在底部1~4层间由中央局部裙房相连,13层处由局部连廊与两个塔楼相连,在17~顶层由钢结构连接体将两座塔楼连接成一个整体。连廊钢结构安装高度最大84 m;跨度最大29.1 m;总提升量563 t,单件提升质量最大109.5 t;吊装难度大,技术质量要求高。连廊钢结构为桁架形式,中间采用双层H型钢与两座塔楼相连接,整个连接体的结构形式比较特殊且两端安装标高不同,结构形式复杂、安装困难、施工安全难以保证,见图1。

图1 连廊钢结构
采用超大型构件液压同步提升技术对连廊钢结构进行吊装。
2 液压提升系统
2.1液压提升系统介绍
超大型构件液压同步提升施工技术主要设备包括YS-SJ-75型液压提升器、YS-PP-60型液压泵源系统、YS-CS-01型计算机同步控制及传感检测系统。
总体布置原则:满足钢结构单元各吊点的理论提升推反力的要求,尽量使每台液压设备受载均匀;尽量保证每台液压泵源系统驱动的液压设备数量相等,提高液压泵源系统的利用率;在总体控制时,要认真考虑液压同步提升系统的安全性和可靠性,降低工程风险。
2.2提升同步控制策略
控制系统根据一定的控制策略和算法实现对钢结构单元整体提升(或下降)的姿态控制和荷载控制。在提升(或下降)过程中,从保证结构吊装安全角度来看,应尽量保证各个提升吊点的液压提升设备配置系数基本一致;保证提升(或下降)结构的空中稳定,以便提升单元结构能正确就位,也即要求各个吊点在上升或下降过程中能够保持一定的同步性(±10 mm)。
根据以上要求,制定控制策略:将集群的液压提升器中的一台提升速度和行程位移值设定为标准值,作为同步控制策略中速度和位移的基准。在计算机的控制下,其余液压提升器分别以各自的位移量来跟踪比对主令点,根据两点间位移量之差△L进行动态调整,保证各吊点在提升过程中始终保持同步。通过三点确定一个平面的几何原理,保证钢结构单元在整个提升过程中的水平度和稳定性。
3 钢结构液压提升施工
3.1钢结构原位拼装
首先对各层连体钢结构的桁架及主梁结构进行现场实地测量,按照实际节点跨度、尺寸标高等在其投影面正下方的首层楼面上进行现场实地拼装,连接体、连廊拼装胎架标高0.600 m,布置在南北塔楼中间的首层楼面上;裙房胎架标高10.440 m,布置在裙房3层楼面。拼装胎架布置见图2。
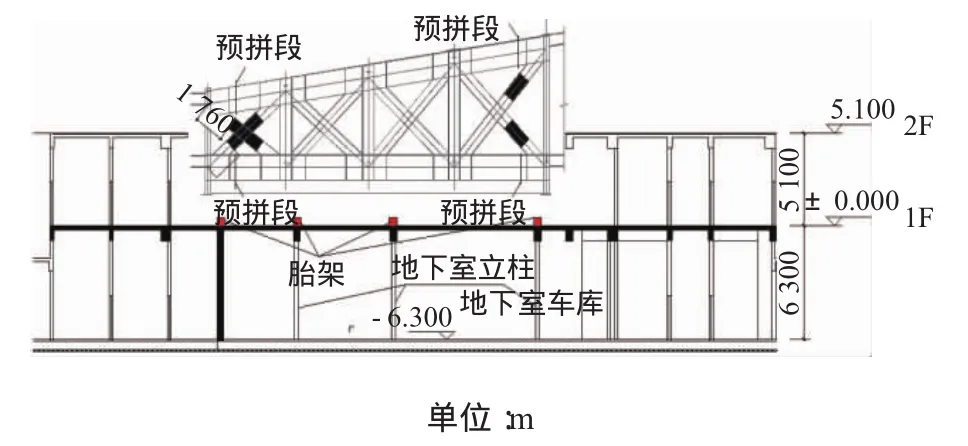
图2 钢结构原位拼装胎架布置
3.2液压提升器安装
1)液压提升器安装到位后,利用临时固定板固定。
2)在液压提升器提升或下降过程中,其顶部必须预留长出的钢绞线,如果预留的钢绞线过多,对于提升或下降过程中钢绞线的运行及液压提升器天锚、上锚的锁定及打开有较大影响。所以每台液压提升器必须事先配置好导向架,方便其顶部预留过多钢绞线的导出顺畅。多余的钢绞线可沿提升平台自由向后、向下疏导。
3)每一台液压提升器对应一套专用底锚结构。底锚结构安装在提升下吊点临时吊具的内部,要求每套底锚与其正上方的液压提升器、提升吊点结构开孔垂直对应、同心安装。
4)17~顶层连接体和钢绞线最大长度为90 m,共用18根钢绞线。17~顶层连接体和13、14层连廊的提升速度为22 m/h,裙房屋面钢梁提升速度为11 m/h。
钢绞线采用由下至上穿法,即从液压提升器底部穿入至顶部穿出。应尽量使每束钢绞线底部持平,穿好的钢绞线上端通过夹头和锚片固定。
待液压提升器钢绞线安装完毕后,再将钢绞线束的下端穿入正下方对应的下吊点底锚结构内,调整好后锁定。每台液压提升器顶部预留的钢绞线应沿导向架朝预定方向疏导。
3.3提升过程控制要点
为确保提升单元及主体结构提升过程的平稳、安全,根据结构的特性,拟采用“吊点油压均衡,结构姿态调整,位移同步控制,分级卸载就位”的同步提升和卸载落位控制策略。
3.3.1提升前的检查工作
1)提升临时措施结构状态检查。
2)设备电气、油管、节点的检查。
3)提升结构临时固定措施是否拆除。
4)将提升过程可能产生影响的障碍物清除。
3.3.2系统调试
检查液压泵站上所有阀或油管的接头是否有松动,溢流阀的调压弹簧处于是否完全放松状态,液压泵站控制柜与液压提升器之间电源线、通讯电缆的连接是否正确,液压泵站与液压提升器主油缸之间的油管连接是否正确。系统送电,检查液压泵主轴转动方向是否正确。在液压泵站不启动的情况下,手动操作控制柜中相应按钮,检查电磁阀和截止阀的动作是否正常,截止阀编号和液压顶推器编号是否对应。检查行程传感器,使就地控制盒中相应的信号灯发讯。
3.3.3吊点设置
每台液压提升器处各设置一套行程传感器,用以测量提升过程中各台液压提升器的提升位移同步性。主控计算机根据各个传感器的位移检测信号及其差值,构成传感器-计算机-泵源控制阀-提升器控制阀—液压提升器-提升单元的闭环系统,控制整个提升过程的同步性。
本工程采用液压提升施工技术,吊点少,对吊点设置要求高,采用专业计算软件对各提升单元吊点进行计算并对钢桁架挠度变形进行验算,确保构件变形在允许范围内。吊点固定见图3。
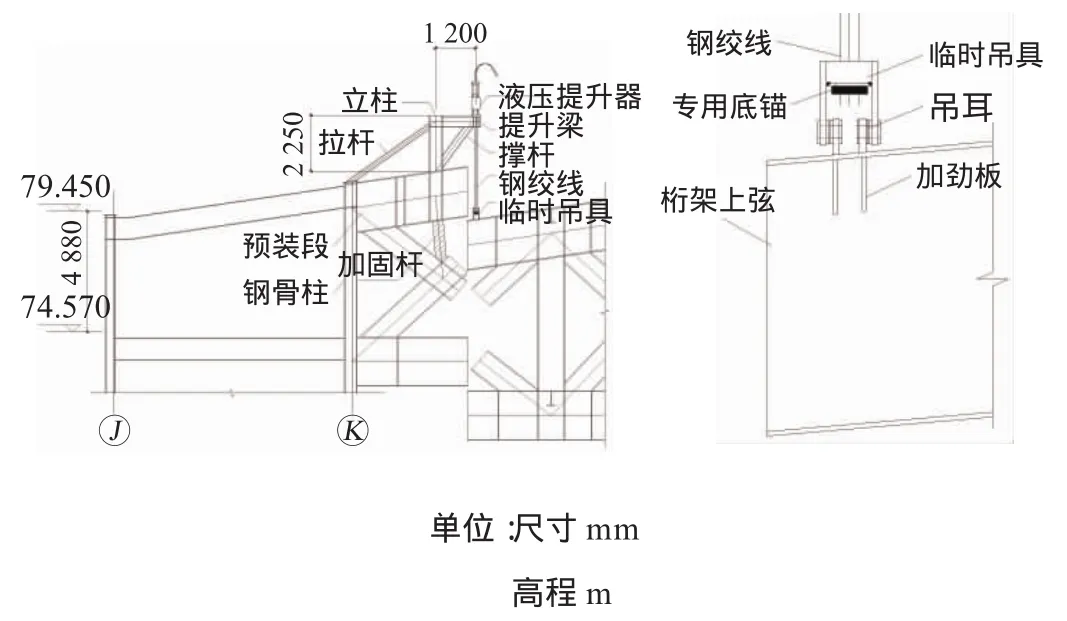
图3 液压提升吊点固定
3.3.4提升分级加载
通过试提升过程中对钢结构提升单元、提升临时措施、提升设备系统的监测,确认符合模拟工况计算和设计条件,保证提升过程的安全。以计算机仿真计算的各提升吊点反力值为依据,对钢结构提升单元进行分级加载(试提升),各吊点处的液压提升系统伸缸压力分级增加,依次为20%、40%、60%、70%、80%;在确认各部分无异常的情况下,可继续加载到90%、95%、100%,直至提升单元全部脱离拼装胎架。
在分级加载过程中,每一步分级加载完毕,均应暂停并检查如:上吊点、下吊点结构、提升单元自身等加载前后的变形情况以及主楼结构的稳定性等情况。一切正常情况下,继续下一步分级加载。当分级加载至提升单元即将离开胎架时,可能存在各点不同时离地,此时应降低提升速度并密切观查各点离地情况,必要时做“单点动”提升,确保提升单元离地平稳。
3.3.5结构离地检查
提升单元离开拼装胎架约150 mm后,利用液压提升系统设备锁定,空中停留4 h作全面检查,包括吊点结构,承重体系和提升设备等。各项检查正常无误,再进行正式提升。
3.3.6姿态检测调整
用测量仪器检测各吊点的离地距离,计算出各吊点相对高差。通过液压提升系统设备调整各吊点高度,使提升单元达到设计姿态。
3.3.7提升过程的微调
在提升过程中,因为空中姿态调整和后装杆件安装等需要进行高度微调。在微调开始前,将计算机同步控制系统由自动模式切换成手动模式。根据需要,对整个液压提升系统中各个吊点的液压提升器进行同步微动或者对单台液压提升器进行微动调整。微动即点动调整精度可以达到毫米级,完全可以满足提升单元安装的精度需要。
3.3.8提升就位
提升钢结构提升单元至距离安装标高约1 200 mm左右暂停提升;再次测量钢桁架或钢梁各点实际尺寸,与设计值核对无误,降低提升速度,继续提升钢结构接近设计位置,各提升吊点通过计算机系统的“微调、点动”功能,使各提升吊点均达到设计位置,液压提升系统设备暂停工作,保持提升单元的空中姿态,满足对接要求。
钢结构提升单元与上部结构对接,使结构形成整体稳定受力体系;钢结构对接工作完毕后,液压提升系统设备同步减压,使钢结构自重转移至两侧主楼结构上,达到设计状态;各吊点同步分级卸载至钢绞线完全松弛;拆除液压提升系统设备及相关临时措施,完成提升单元的整体提升安装。
3.3.9整体同步提升
以调整后的各吊点高度为新的起始位置,复位位移传感器。在整体提升过程中,保持该姿态直至提升到设计标高附近。
3.3.10提升过程的监控
为确保钢结构提升的顺利进行,在整个同步提升过程中应随时检查:
1)观测提升系统压力变化情况,定时做好记录并和预设值进行比对;
2)上吊点提升平台结构工作情况;
3)钢梁结构提升过程的整体稳定性;
4)提升钢绞线的垂直度偏差(应控制在±1°以内);
5)液压提升系统设备的提升同步性;
6)激光测距仪配合测量各提升吊点在提升过程中的同步性;
7)提升承重系统是提升工程的关键部件,务必做到认真检查,仔细观察;
8)液压动力系统监控。
4 结语
超大型构件液压同步提升施工技术在南港工业区投资服务中心项目的成功应用,提高了工程的施工质量,节约了工程成本,保证了施工安全。
[1]DGTJ 08-2056—2009,重型结构(设备)整体提升技术规程[S].
[2]GB50205—2001,钢结构工程施工质量验收规范[S].
[3]贺洪伟,王庆礼,王彦超.大跨重型高空钢结构连廊逆向液压同步整体提升施工技术[J].建筑施工,2012,41(369):95-98.
□张文博、刘文、田凯/中建八局三公司北京分公司。
TU758.11
C
1008-3197(2016)04-22-03
2016-01-05
黄凯/男,1990年出生,助理工程师,中建八局三公司北京分公司,从事工程技术管理工作。
□DOI编码:10.3969/j.issn.1008-3197.2016.04.008
