一种基于投影变换的深度图像生成算法
2016-10-17贾凯华李和志
贾凯华,李和志,朱 鹏
(江西科技学院 南昌市材料研究与结构检测重点实验室,江西 南昌 330098)
一种基于投影变换的深度图像生成算法
贾凯华,李和志,朱鹏
(江西科技学院 南昌市材料研究与结构检测重点实验室,江西 南昌 330098)
深度图像的表示是实现三维目标识别、配准等工作的前提。针对地面三维激光扫描得到的点云数据,提出一种基于投影变换的深度图像生成算法。采用投影变换将三维点沿观察坐标系的法向量投影到观察平面上,使投影向量和观察平面垂直,这样观察点和观察平面间的距离就不会影响物体的投影大小和形状,有效避免了“失真”现象的发生。利用灰度图像生成深度图像,使用方案对地面激光扫描系统获取的建筑物实验数据进行具体处理。结果表明,文中基于投影变换的图像生成方法更能直观地反映建筑物表面的几何分布特征,为后续特征的提取奠定基础。
点云;三维激光;中心投影;深度图像
由于激光扫描获取的建筑物点云数据量非常大,直接对点云的几何数据进行后续处理,如特征识别、图像提取等都比较困难,因此,将三维点云转换为一幅平面的二维图像,这里的深度图像与传统的深度图像有所不同,是利用投影变换将单站扫描的点云转换后得到的一幅影像。深度图像可以作为快速确定三维点云邻域关系的索引手段,借助已获取的数字图像处理算法可以从此影像上直接提取有用特征,可以解决三维点数据检索处理较难的问题。本文从图像入手,分析传统的图像生成方法。
1 传统的点云图像生成方法
目前已有的图像生成算法,不论是针对车载点云数据还是针对机载点云数据,大部分都是采用深度图像的生成原理,本文也曾尝试利用该方法生成图像。实验采用由美国天宝公司生产的Trimble GXTM三维激光扫描仪,以某大学校园内一幢教学楼获取的局部点云数据进行实验,在主频为1.79 GHz,内存为1.5 G,Windows2000的PC机上,通过matlab软件编程实现运算过程,结果如图1所示。

图1 数据一某平面的深度图
很明显,若直接将墙面点云转换成深度图像会出现实景物体扭曲、几何失真的现象。所谓“几何失真”是指图像在获取过程中,由于成像系统具有非线性,或摄像时是斜视角度、视角变化等原因,使得成像后的图像与原景物相比,产生比例失调,甚至扭曲,这类图像退化现象称之为几何失真(畸变)。产生这种现象的原因是深度图像是以扫描仪中心作为观察点,且是基于球面投影的。当扫描视场角较大时,图像自然会出现一定的弧度,角度越大,弧度越大,扭曲变形越严重。这样的距离图像显然不能满足建筑物特征提取的要求。针对该问题,本文设计了一种新的图像生成算法。
2 基于投影变换的点云图像生成方法
考虑到绝大多数建筑物立面都是平面,且垂直于地面,若把三维点沿观察坐标系的法向量投影到观察平面上,使投影向量和观察平面垂直,这样观察点和观察平面间的距离就不会影响物体的投影大小和形状,有效避免了“失真”现象的发生,而且建筑物的边缘轮廓等细节信息也能够清楚显现出来。具体过程如下:
2.1空间点投影变换
首先将三维点投影到所在的拟合平面上,如图2所示,P(x0y0z0)为空间平面的任意一点,投影平面是α,它是拟合建筑物的墙面点得到的,设方程为ax+by+cz+d=0,Q为P在平面α上的投影点,设坐标为Q(xyz),现在要根据P点坐标和平面方程,求解投影点Q的坐标。

图2 空间点向平面投影示意图
由于Q点位于α平面上,因此坐标值也满足平面方程,即
ax+by+cz+d=0.
(1)
(2)
联立方程得
(3)

(4)
2)旋转矩阵R。由坐标系o1-x1y1z1到坐标系o2-x2y2z2的旋转矩阵由o2-x2y2z2的3个坐标轴在o1-x1y1z1下的单位方向向量构成。

因此可得到旋转矩阵
(5)
根据式(4)和式(5)可得由坐标系o1-x1y1z1到坐标系o2-x2y2z2的旋转矩阵

对于空间中任意一点,其在坐标系o1-x1y1z1下的齐次坐标,均可通过旋转和平移转换到坐标系o2-x2y2z2下,变换公式为
(6)
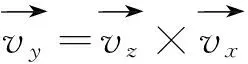
式中:X1为扫描点云的原始坐标,X2为转换后的坐标值。按照上述方法,将图中的点向拟合平面投影,投影后的三维坐标和二维坐标的部分结果如表1所示。
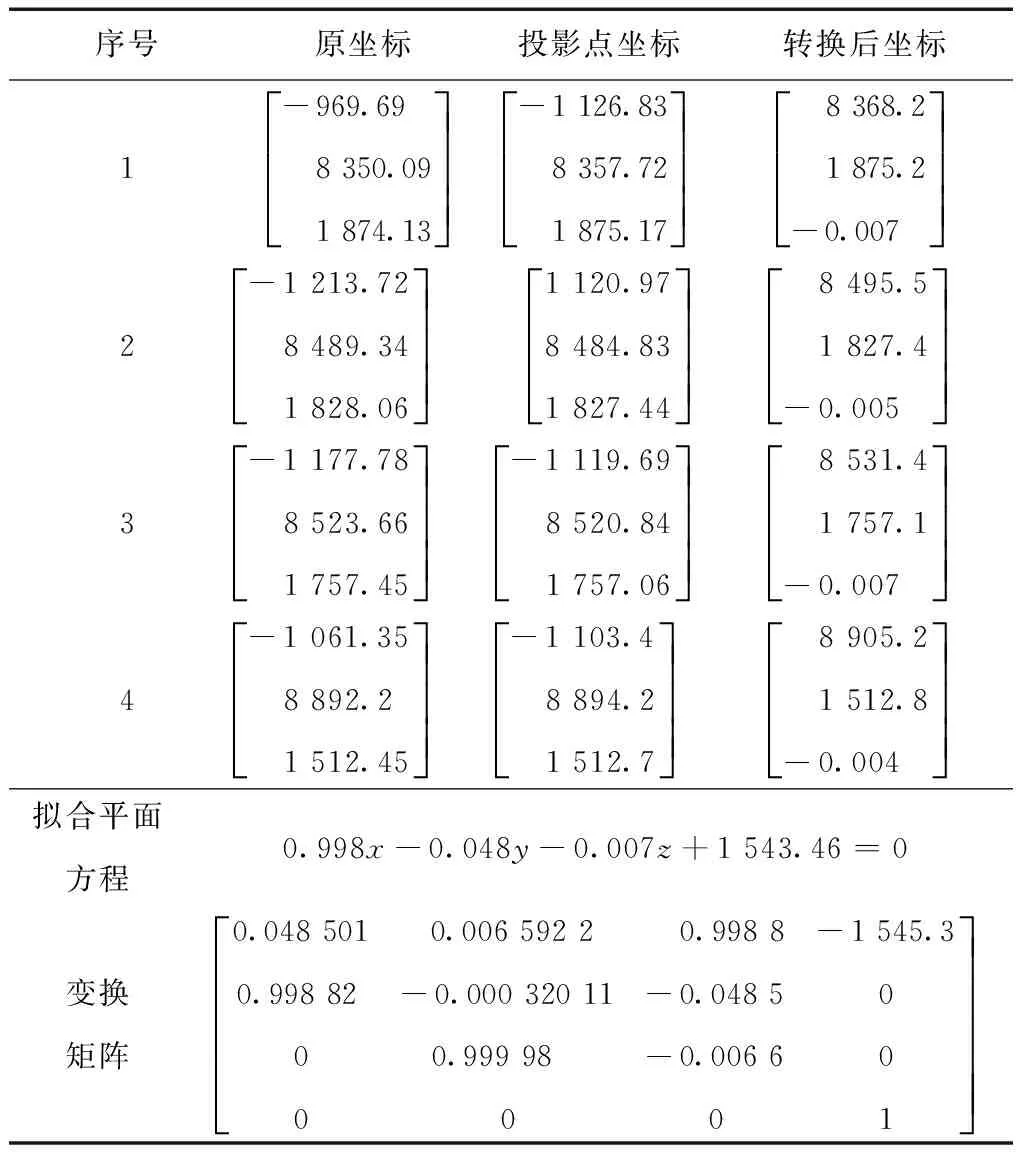
表1 三维点投影变换的计算结果
由表1可知,在拟合平面内新的坐标系下,坐标虽然还是三维的,但z坐标值几乎为0,可以忽略,只保留x,y坐标值,这样,每个点的坐标就从三维降到二维了。根据二维坐标值在平面上画出投影点,结果如图3(b)所示,与未经坐标转换得到的图3(a)比较,投影后墙面点与实景基本一致,无扭曲和变形,阳台点云呈现较规则的矩形,但它还不是图像格式,下面介绍由二维点转换成图像的方法。
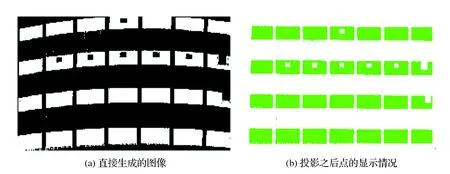
图3 空间点向平面投影示意图
2.2深度图像的生成方法
经过以上处理,点云由三维变成了二维。设点云分布范围为(Xmin,Ymin)和(Xmax,Ymax),其中某一个点pk(Xk,Yk),根据所有点的范围进行格网划分,设网格间距为Δd,由此可求得点pk的平面坐标
(7)
其中,rk,ck分别表示各点的行列号,由于下文将用到形态学运算,该操作对象是二值图像,因此这里采用二值图的生成方法,当格网内有点时,像素设为1,当格网内没有点时设为0,每个格网都有对应的像素值,这样便得到一幅能反映平面点云分布特征的二值图。
为验证本文基于投影变换的图像生成方法的有效性,仍然以图1中点云为例实验,并与深度图生成方法对比,如图4所示,可看出基于投影变换的图像生成方法更能直观地反映建筑物表面的几何分布特征,图像效果较好。
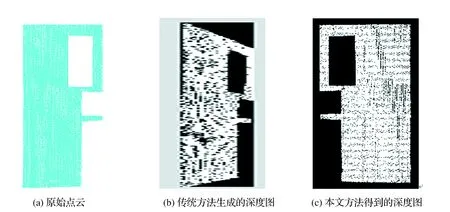
图4 不同图像生成方法的结果对比
此外,与直接生成图像的方法相比,在本方法生成图像的方法效率也较高,不同原始点云数量两种方法的计算时间比较见表2。

表2 不同点云数量两种方法计算时间比较
3 结 论
本文利用投影变换的原理,将空间点云投影到观察平面上,使投影向量和观察平面垂直,从而使观察点和观察平面间的距离就不会影响物体的投影大小和形状,有效避免了“失真”现象的发生。利用灰度图像生成深度图像,更能直观地反映建筑物表面的几何分布特征,为后续特征提取、配准、三维重建等奠定基础。
[1]杜月阳.三维激光测量系统点云数据的区域提取、模型重构及锻件尺寸测量研究[D]. 上海:上海交通大学,2012.
[2]朱宁宁.三维激光扫描在地铁隧道形变监测中的应用[J].测绘工程,2015,24(5):63-68.
[3]张会霞, 陈宜金, 刘国波.基于三维激光扫描仪的校园建筑物建模研究[J].测绘工程,2010,19(1):32-34.
[4]杨洋. 基于车载LIDAR数据的建筑物立面重建技术研究[D]. 郑州:信息工程大学,2010.
[5]魏征,董震,李清泉.车载LiDAR点云中建筑物立面位置边界的自动提取[J].武汉大学学报(信息科学版),2012,37(11):1311-1315.
[6]张凯. 三维激光扫描数据的空间配准研究[D]. 南京:南京师范大学,2008.
[7]BARTOLI A.Piecewise Planar Segmentation for Automatic Scene Modeling[C]. Proceedings of the IEEE International Conference on Computer Vision and Pattern Recognition, CVPR’01, Hawaii, USA, 8-16, 2001,2(1):283-289.
[8]RABBANI T, HEUVEL F A, VOSSELMAN G. Segmentation of point clouds using smoothness constraint. International Archives of Photogrammetry[J].Remote Sensing and Spatial Information Sciences 36 (Part 5),2006:248-253.
[9]LERMA J L, BIOSCA M.Unsupervised robust planar segmentation of terrestrial laser scanner point clouds based on fuzzy clustering methods[J]. ISPRS, Journal of Photogrammetry & Remote Sensing,2008,63, 84-98.
[10] 孟娜.基于激光扫描点云的数据处理技术研究[D].济南:山东大学,2009.
[11] 尹丹.古建筑三维重建中的深度图像配准技术研究与应用[D].西安:西北大学,2008.
[12] 杜晓晖,尹宝才,孔德慧.一种点云混合简化算法[J].计算机工程与应用,2007,43(34):43-45.
[责任编辑:刘文霞]
A depth image generation algorithm based on projection transformation
JIA Kaihua,LI Hezhi,ZHU Peng
(Nanchang Key Laboratory of Material and Structure Detection Jiangxi University of Technology, Nanchang 330098,China)
Depth representation of the image is a prerequisite to achieve a three-dimensional object recognition, registration and other work. For point cloud data obtained by terrestrial laser scanning, a depth image generation algorithm is proposed based on the principle of a central projection. The method uses the central projection vector along the observed three-dimensional coordinate system projected onto the observation plane, making the projection vector perpendicular to the plane and observed, so that the distance between the observation point and observation plane will not affect the projection size and shape of the object, avoiding the “distortion” phenomenon generating a depth image from the grayscale image. Finally, with the present scheme, the experimental data terrestrial laser scanning systems are acquired. The results show that the image generated based on the projection transformation can directly reflect the distribution of the surface geometry of the building, which provides a subsequent feature extraction foundation.
point cloud; three-dimensional laser; central projection; depth image
10.19349/j.cnki.issn1006-7949.2016.12.012
2015-08-24
江西科技学院2014年度校级自然科学研究项目(ZR14QN05)
贾凯华(1975-),女,硕士研究生.
TP391
A
1006-7949(2016)12-0061-04
