一种水下载体干扰磁场的空间差分补偿方法
2016-10-13赵塔陈雨薇周志坚程德福
赵塔, 陈雨薇, 周志坚, 程德福
(吉林大学仪器科学与电气工程学院,吉林长春130026)
一种水下载体干扰磁场的空间差分补偿方法
赵塔, 陈雨薇, 周志坚, 程德福
(吉林大学仪器科学与电气工程学院,吉林长春130026)
在水下地磁导航技术中,载体的干扰磁场是影响地磁场测量的关键因素之一。为了实现对载体更好的航向控制以及提高地磁导航的精确度,需要对载体的干扰磁场进行补偿。针对传统模型方法不能全面描述干扰磁场种类的不足,改进了传统测量模型表达式,提出了一种对载体干扰磁场进行补偿的空间差分模型方法,并对方法中传感器不同的安装位置做了详细的对比分析。通过仿真对补偿方法进行了验证,加入最大25nT外界杂散干扰磁场后,差分补偿结果精确度为10nT,比传统补偿方法的精确度提高了两倍。研究结果对水下载体地磁导航方法在实际中的应用具有一定的指导意义。
水下地磁导航;干扰磁场补偿;传统模型;差分模型
0 引言
导航定位技术在现代科学技术发展中处于基础地位,并已经广泛应用于各种军用和民用领域。由于电磁波在水下会快速衰减,而惯性导航方法存在累计误差等诸多问题,使水下运动载体的导航定位方法受到一定程度的制约,因此水下载体实现长时间精确的导航定位具有更大的难度[1]。而地磁导航主要以一种辅助导航方式被人们所接受,它具有无源、无辐射、隐蔽性好等优点,已经成为当前导航领域研究的热点[2]。如何获得导航区域内精确的地磁场成为地磁匹配的前提条件,也是决定导航精确度的关键因素之一。水下磁场环境复杂,载体自身的各种铁磁性构件、电子设备以及周围未知磁源等的磁场都会叠加在地磁场上,对磁力仪的测量造成干扰,因此必须对其进行补偿[3-4]。载体干扰磁场的补偿是地磁导航技术应用中必须解决的关键问题之一。目前,对海洋载体干扰磁场补偿主要还是基于传统模型的方法[5-6],李季、潘孟春等人提出的半参数模型法虽然能够提高参数估计值的准确性[7],但它主要针对模型中的感应系数矩阵和固定磁场,并非改进了传统补偿模型。文献[8]、文献[9]对传统模型方法进行了详细的介绍和实验验证,结果证明传统模型方法补偿结果误差较大,难以实现载体的精确导航。由于水下运行的载体处在一种特殊的环境,其周围有很多未知的磁源,而传统模型法采取的是单传感器的测量和补偿,导致测量磁场极易受到周围环境磁场的干扰,而且传统模型存在对载体周围磁场类型描述不充分的问题,使补偿后的结果产生极大的误差。
本文在传统模型方法基础之上,详细分析了水下环境载体周围磁场特性,并根据分析结果构建了新的磁场测量模型,引入差分的求解思想推导出差分模型,并对差分补偿方法中传感器的安装方案做了详细的对比分析。该方法为提高地磁场三分量测量精度,增强补偿方法的抗干扰能力提供了可能,最后通过仿真验证了此方法的有效性。
1 传统模型方法及存在问题
在水下存在多种运行载体,如水下机器人、潜艇、其他水下航行器等,它们大多都是由铁磁性材料建造而成,当受到外界环境中的地磁场磁化后,会在自身磁矩的作用下向周围辐射一些附加磁场,主要分为感应磁场和固定磁场。感应磁场主要由载体上的软磁性材料受到外界地磁场磁化而产生,该磁场的大小与引起它的外界磁场满足一定的线性关系,即载体上每一部分的感应磁矩正比于地磁场的各个分量。因此,感应磁场的大小和方向会随载体姿态的不同而发生改变,满足如下关系:
式中HR=[HRxHRyHRz]T为载体坐标系下感应磁场三分量,K为感应磁场系数矩阵,它是一个3×3的方阵,其大小只与载体的材料、形状、传感器的安装位置有关。HG=[HGxHGyHGz]T为地理坐标系下地磁场三分量,A为地理坐标系与载体坐标系之间的变换矩阵,对于一个确定载体只要传感器的安装位置不变,该点的感应系数矩阵中的各个元素被视为常数,可以通过计算拟合得到。
固定磁场HS=[HSxHSyHSz]T是载体在建造过程中或长期停放受到相同方向地磁场的磁化而产生的剩磁,其值在短时间内认为是不随时间发生变化的,。
由全部空间混合磁场的矢量叠加最终构成的传统测量模型为[10]

式中HM=[HMxHMyHMz]T是载体坐标系下磁矢量传感器三分量测量值,将式(1)式代入式(2)整理后得:

式中E为单位矩阵,式(3)是根据矢量传感器测量数据和拟合参数进行补偿的传统模型。
对于实际载体而言,水下环境极其复杂,利用传统模型来描述载体周围磁场会存在一定的问题。由于载体在地磁场中运动还可能产生涡流磁场。载体的发动机、电气设备等其他机构也会向外辐射低频交流磁场。海底沉船、水面船只或周围其他运动载体等也会产生一些杂散干扰磁场,这些磁场成分都会对地磁传感器的测量造成影响,而传统模型中将这些干扰成分全部忽略掉,这也是造成传统模型方法补偿精确度较低的原因之一。
2 差分模型建立
考虑到上述各种影响因素,需要对传统模型做出改进,并提出新的补偿方法。在式(2)中补充更多干扰磁场成分,得到载体上磁矢量传感器测量磁场完整表达式为

式中HE是载体坐标系下的涡流磁场三分量,由于地磁场矢量自身梯度小,当水下载体实际运动速度相对较低时,产生的涡流磁场一般可以忽略;∑HA是载体坐标系下各种电气设备产生的低频交流磁场三分量,可通过设计合理的滤波器将其滤除。∑HN是载体坐标系下载体周围其它磁源产生的干扰磁场三分量,它是一种或多种未知来源的外界杂散干扰磁场,既无法估计大小也不确定其方向,是测量中难以去除和补偿掉的。在传统模型补偿方法中由于采取单传感器测量无法去除这种成分而忽略掉了这部分磁场。因此,式(4)经滤波整理后,得到新的传感器测量模型:

式中虽然∑HN具有不确定性,但它是水下复杂环境磁场中必不可少的成分之一,这部分干扰磁场会叠加到HM中,而传统测量模型式(2)中只考虑了部分影响因素,并没有对周围干扰磁场进行全面描述。因此,忽略周围杂散干扰磁场影响了传统模型方法总体的补偿精度。
如何补偿掉式(5)中的HR、HS和∑HN成为面临主要问题。针对上述问题,提出了基于多传感器的差分模型,根据式(5)对两个矢量传感器构建如下方程组

由于地磁场各个分量自身梯度较小,我国从南到北地磁场水平分量强度主要随纬度而变化[11],根据载体实际尺寸两个传感器安装时的距离又比较近。因此,在地理坐标系下两个传感器测量的地磁场三分量与载体位置的地磁场三分量HG基本相同,满足下面关系:

各种干扰磁场满足磁场强度在水中衰减的经验公式[12],磁场强度和距离的三次方成反比,再由一阶和二阶导数可知磁化体磁场呈衰减特性,且梯度随距离逐渐减小。当测量位置与磁化体距离较近时,把载体自身看成磁化体,近距离处磁场强度的梯度较大,使两个传感器位置的感应磁场有较大不同,即感应系数矩阵K1和K2存在差异性。当测量位置与磁化体距离较远时,把外界未知磁源看成磁化体,由于距离较远磁场强度的梯度较小,因此可以把这部分磁场看成是均匀磁场,满足下面关系式

通过上面的分析,将式(6)中的两个方程做差,可得式(9)

上式为干扰磁场补偿的差分模型,其中感应系数矩阵K1和K2以及固定磁场H1S和H2S在载体不同位置存在明显差异,可以通过控制载体姿态在磁场变化平缓的环境下进行机动测量后估计得到,通常采取“8字旋转法”或者“360°旋转法”,常用的参数估计方法有椭圆约束法、基于Kalman滤波法、非线性最小二乘法[17]等。H1M、H2M和A的数据分别由矢量传感器和姿态传感器测量获得。因此,通过上述差分模型即可对干扰磁场进行补偿,特别对一些外界磁源产生的杂散磁场能够起到较好的补偿效果,从而获得地理坐标系下的地磁场。
3 传感器的空间布局方案
差分模型是基于差分思想对干扰磁场进行补偿,为了更好的体现差分模型补偿方法的优势,传感器的安装位置要满足一定的要求。水下载体根据流体力学原理一般采取左右对称的梭形结构,因此传感器应沿着载体上表面中轴线两侧安装,同时,需要尽可能的缩短两个传感器的直线距离,使外界杂散磁场在两个传感器上产生的响应尽可能相同,从而在差分模型中将这部分磁场差掉,提高补偿精确度。按照上述要求传感器大致可以有三种安装方法。如图1所示,x轴在载体左右对称的剖面上指向载体前进方向为正,y轴在载体中心平面上指向右侧为正,z轴垂直xy平面向下为正。在载体上远离尾翼的位置捷联式安装两个或多个三分量磁传感器。图1(a)中两个传感器在同高度的平面上,具有相同的x和z轴坐标,称其为水平对称安装。图1(b)中两个传感器在图1(a)基础上在x轴方向产生一定位移,具有相同的z轴坐标,称其为水平错位安装。图1(c)中两个传感器在图1(b)基础上又在z轴方向产生一定位移,保证了两个位置的三维坐标完全不同,称其为空间错位安装。通过研究表明,磁化磁场各分量值是载体内部横向(x轴方向)、纵向(y轴方向)和垂向(z轴方向)分别受地磁场三分量磁化后产生的,而图1(a)和图1(b)中传感器安装位置均具有部分相同坐标值,这样会使在相同坐标值方向上产生的磁化情况比较接近,导致感应系数矩阵中各元素值和固定磁场各分量值之间区分度小,容易造成式(9)出现不可解的情况。因此,采取空间错位安装方式可以避免感应系数矩阵之差出现奇异矩阵,确保了差分测量模型的可解性。
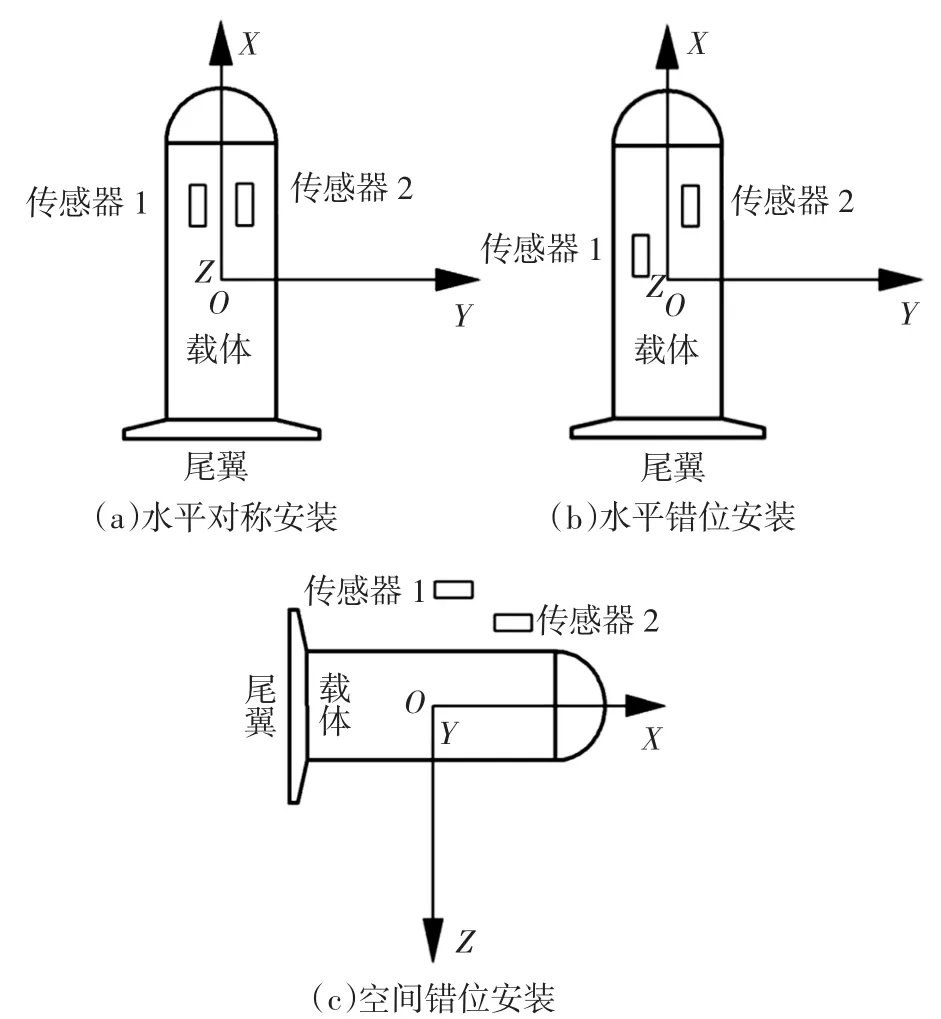
图1 水下载体坐标系及传感器安装图Fig.1 Underwater vehicle coordinate system and sensor installation diagram
4 仿真实验研究
应用大型有限元仿真软件对该方法进行仿真验证,采用单椭球载体来构建模型[18-19],载体模型为长度50 m,宽度和高度均为5 m的椭球形空腔,腔体厚度为0.05 m,后端带有尾翼,材料的相对磁导率为100。在模型上表面中轴线两侧以空间错位的方式捷联安装两个三分量传感器,传感器1离载体表面高度为1.0 m,传感器2离载体表面高度为2.0 m,两个传感器的直线距离为1.73 m。在长、宽、高均为100 m的正方体求解域中加入x、y、z方向的矢量数据来提供均匀背景地磁场。在磁场属性中添加初始磁矢量来提供载体自身三个方向的固定磁场。
首先,在∑HN=0的环境中进行相关参数的仿真求解。设置已知的地磁场三分量为[40 859nT 185nT-3 991nT],固定磁场分别为[120nT 150nT 170nT]和[125nT 165nT 185nT],根据360°旋转法使模型水平旋转一周,并伴有横摇和纵倾动作,且横摇和纵倾角不超过5°,角度的最大误差为0.001°,得到的传感器测量磁场数据如表1所示。
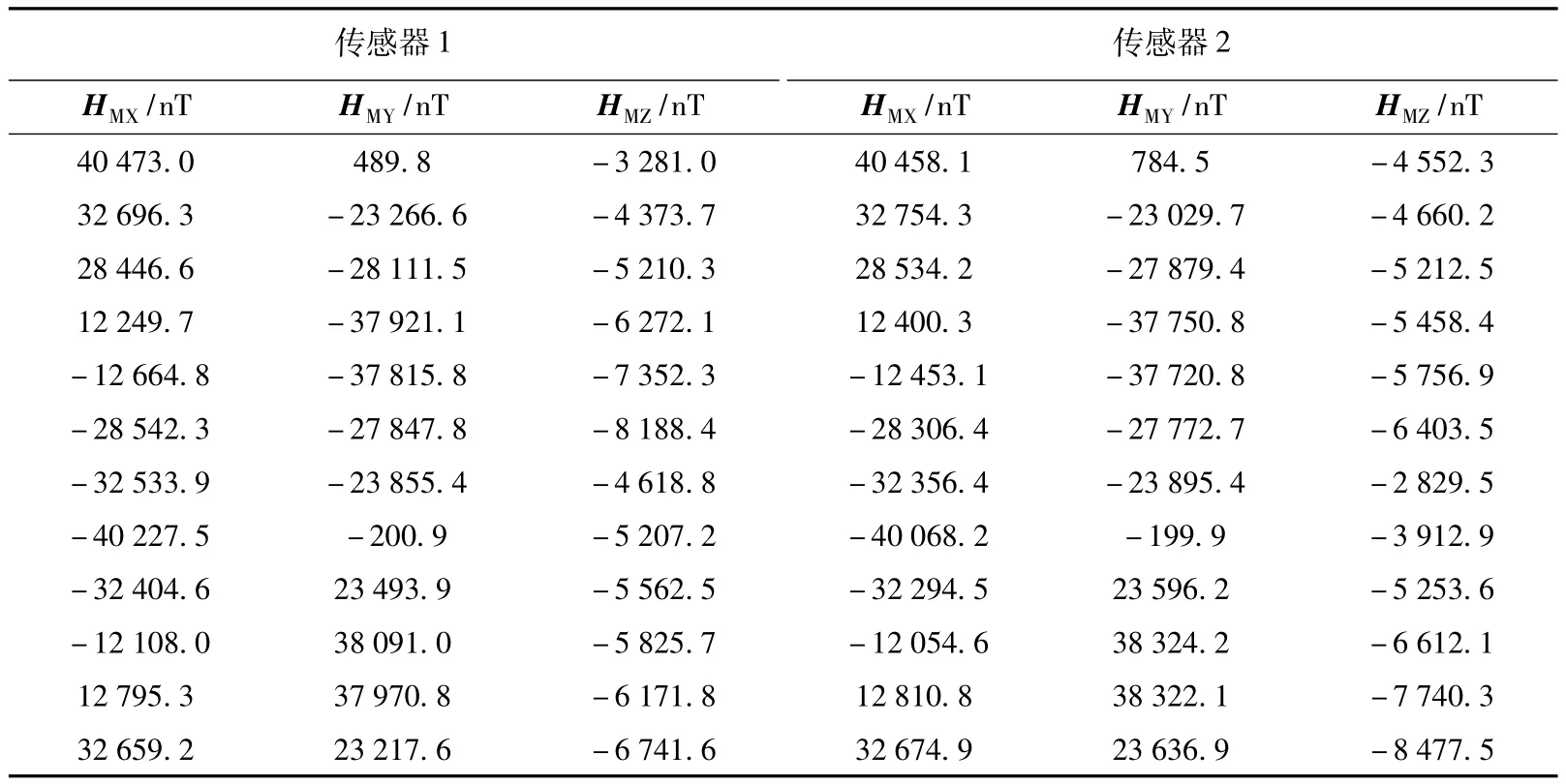
表1 传感器测量磁场数据Table 1 Measurement data of multi-sensors
采用最小二乘法拟合出每个传感器的感应系数矩阵和固定磁场结果为:
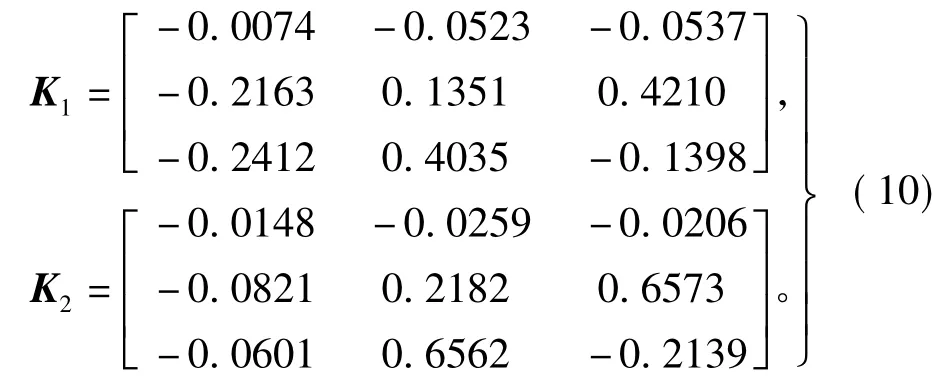

通过仿真计算可以得到固定磁场拟合值与真实值之间的相对误差最大为0.5%,通过对传感器的空间错位安装布局方式,使感应系数矩阵内部元素差值的有效位数最小为10-2数量级,并没有因为差分计算而出现奇异矩阵,确保了差分模型数学表达式的可解性。
然后,在北纬5°东经110°到北纬6°东经111°海域,根据IGRF-11/2010模型均匀选取20个地磁场三分量数据进行仿真,假设过程中载体坐标系与地理坐标系相同。将估计出的相应参数带入差分模型式(9)中对干扰磁场进行补偿,为了更接近真实水下载体周围磁场环境,在仿真测量数据中加入随机干扰来模拟实际环境中的外界杂散磁场(∑HN≠0。设在传感器上产生的杂散干扰磁场三分量最大幅值为±25nT,磁场梯度为2nT/m。
图2所示为补偿前和补偿后磁场强度各分量值,图中蓝色圆圈实线为1号传感器数据,黑色虚线为2号传感器数据,“传统模型结果”为两个传感器分别补偿后结果的平均值,红色实线表示的“地磁场实际值”是通过IGRF-11/2010模型获得的地磁场数据。可以明显的看到图(a)、(c)、(e)中的磁场数据由于受到感应磁场、固定磁场和外界杂散磁场的共同影响与实际地磁场x分量产生的最大偏差大于700nT。通过图(b)、(d)、(f)可以看出两种方法都能够对干扰磁场进行一定程度的补偿,但传统模型方法在加入外界杂散干扰磁场后其补偿结果的误差比较大,最大绝对误差为30.0nT,最大相对误差为19.1%。而差分模型补偿方法受外界杂散干扰磁场的影响非常小,最大绝对误差仅为10.0nT,最大相对误差为4.0%。产生误差的主要原因是由于仿真数据量有限,造成感应系数矩阵和固定磁场拟合估计值不够准确,同时外界干扰磁场存在梯度也是造成误差的原因。仿真结果不但说明了差分模型中各个参数估计值的可解性,还证明了差分模型法比传统模型法在干扰磁场补偿方面具有更高的精确度,在去除外界磁场异常方面具有更强的优势,显著提高了地磁场测量的准确性和可靠性。
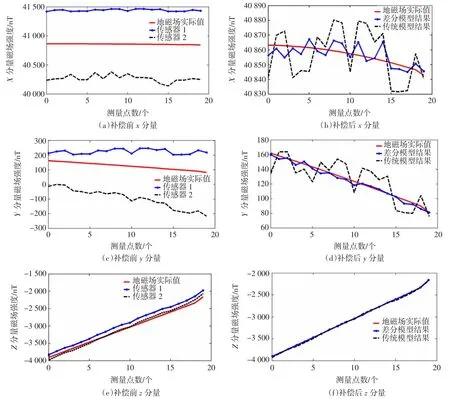
图2 载体干扰磁场补偿前和补偿后磁场强度各分量值Fig.2 Vehicle interference magnetic field before and after compensation of each component of the magnetic field intensity
5 结论
本文针对传统测量模型方法中单个磁传感器在水下载体干扰磁场补偿方面存在的抗干扰能力差、补偿精确度低的问题,提出了基于多传感器的补偿方法,并通过传感器的阵列式差分运算推导出了差分模型。在模型表达式中的差分形式仅受磁场的梯度影响,不受自身磁场强度大小的限制,这也正是此方法的优势所在。而在传统模型方法中,产生的外界杂散干扰磁场会直接被引入地磁场中,严重影响了补偿精确度,并且当干扰磁场幅值越大时,其补偿精确度越低。因此,差分模型法能够更有效的补偿载体的干扰磁场,特别是对外界磁异常体产生的磁场有更好的补偿效果。仿真结果表明,存在外界干扰磁场时,差分模型方法补偿精确度明显高于传统模型方法,而且相对误差比传统模型方法降低了15.0%,提高了地磁场测量数据的可靠性。为水下地磁场三分量实地测量中干扰磁场补偿工作奠定了基础。
[1]吴招才,高金耀,罗孝文,等.海洋地磁三分量测量技术[J].地球物理学进展,2011,26(3):902-907. WU Zhaocai,GAO Jinyao,LUO Xiaowen,et al.Marine measurement of the three-component geomagnetic field[J].PROGRESS IN GEOPHYSICS,2011,26(3):902-907.
[2]赵国荣,黄婧丽,胡正高.地磁辅助惯性组合导航技术分析[J].系统仿真技术,2013,9(2):119-123. ZHAO Guorong,HUANG Jingli,HU Zhengao.Geomagnetic aided inertial navigation technical analysis[J].System Simulation Technology,2013,9(2):119-123.
[3]LUKE S,LIU H H,DAVID J B.Navigation technologies for autonomous underwater vehicles[J].IEEE Transacti-on on Systems,Man,and Cybernetics-Part C:Applications and Reviews,2008,38 (4):581-589.
[4]黄珍雄,罗孝文,关云兰,等.海洋地磁导航区域适配性分析[J].江西科学,2013,31(1):35-38. HUANG Zhengxiong,LUO Xiaowen,GUAN Yunlan,et al.The suitability analysis of marine magnetic navigation area[J].JIANGXI SCIENCE,2013,31(1):35-38.
[5]NGUYEN T S,GUICHON J M,CHADEBEC O,et al.Ship magnetic anomaly computation with integral equation and Fast Multipole method[J].IEEE Transactions on Magnetics,2011,47(5):1414 -1417.
[6]LESUR V,CLARK T,TURBITT C,et al.A technique for estimating the absolute vector geomagnetic field from a marine vessel[J]. Journal of Geophysics and Engineering,2004,(1):109-115.
[7]李季,潘孟春,罗诗途,等.半参数模型在载体干扰磁场补偿中的应用研究[J].仪器仪表学报,2013,34(9):2147-2152. LI Ji,PAN Mengchun,LUO Shitu,et al.Study on the application of semiparametric model in vehicle interferential magnetic field compensation[J].Chinese Journal of Scientific Instrument,2013,34(9):21-47-2152.
[8]闫辉,肖昌汉.一种海洋环境地磁场三分量的测量方法[J].海军工程大学学报,2005,17(6):80-83. YAN Hui,XIAO Changhan.A method of measuring three-component geomagnetic field on ocean[J].Journal of Naval University of Engineering,2005,17(6):80-83.
[9]闫辉,肖昌汉,沈明,等.船载三分量测量算法的实验验证[J].海洋测绘,2010,30(3):27-29. YAN Hui,XIAO Changhan,SHEN Ming,et al.The experimental verification of ship three-component geomagnetic fieldmeasurement method[J].Hydrographic Surveying and Charting,2010,30(3):27-29.
[10]NOVUHIRO ISESAKI.A New Shipboard Three-component magnetometer[J].Geoph-ysics,1986,51(10):1992-1998.
[11]安振昌.地磁场水平梯度的计算和分析[J].地学科学进展,1992,7(1):39-43. AN Zhenchang.Calculations and analyses of the horizontal gradient of the geomagnetic field[J].Advances in Earth Science,1992,7(1):39-43.
[12]扬世周.航空磁力反潜浅谈[J].舰船科学技术,1979(12),66-76. YANG Shizhou.Discussion of aeromagnetic anti-submarine[J]. Ship Science and Technology,1979(12):66-76.
(编辑:贾志超)
Spatial difference compensation method of underwater vehicle interference magnetic field
ZHAO Ta, CHEN Yu-wei, ZHOU Zhi-jian, CHENG De-fu
(College of Instrumentation and Electrical Engineering,Jilin University,Changchun 130026,China)
Vehicle interference magnetic field is one of the key factors of the geomagnetic field measurement in underwater geomagnetic navigation.In order to control course and improve the precision of geomagnetic navigation,it is necessary to compensate for vehicle interference magnetic field.Because the traditional model can't fully describe the interference magnetic field component,a new method was proposed based on a spatial difference model to compensate the interference magnetic field and to improve the compensation precision compared with the traditional model.The influence of the sensor installation location was analyzed and the best laying position of the magnetic sensors was found.To verify the proposed compensation method,a simulation experiment was carried out under the condition of±25nT stray outside interference magnetic field,and the simulation result shows that the accuracy of the proposed method is 10nT which is double than that of the traditional model compensation method.The proposed method was used to solve similar problems in underwater vehicle geomagnetic navigation.
underwater geomagnetic navigation;compensate for interference magnetic field;traditional model;difference model
10.15938/j.emc.2016.03.011
TM 154.3
A
1007-449X(2016)03-0071-06
2015-04-21
国家重大科研装备研制项目(ZDYZ2012-1-02)
赵塔(1987—),男,博士研究生,研究方向为弱信号检测、地磁导航技术;
陈雨薇(1994—),女,本科,研究方向为电机拖动与控制;
周志坚(1980—),男,博士,讲师,研究方向为弱信号检测、智能仪器;
程德福(1959—),男,教授,博士生导师,研究方向为弱信号检测、智能仪器。
周志坚
