基于指纹信息融合的蜂窝网室内定位算法研究*
2016-10-11蒋思琪王向勇
[蒋思琪 王向勇]
基于指纹信息融合的蜂窝网室内定位算法研究*
[蒋思琪 王向勇]
针对单一蜂窝网络下基于位置指纹室内定位系统精度低,出现大误差点几率大的问题,提出一种GSM/WCDMA网络指纹信息融合的定位方案。该方案根据移动终端在GSM、WCDMA网络下接收到的小区RSSI值得到多个估计位置坐标,依据GSM、WCDMA网络下的定位点集构造置信椭圆,最后根据置信椭圆的位置关系决策出移动终端的最终估计位置坐标。真实环境数据验证表明,提出的GSM/WCDMA决策层融合定位方案相较于单GSM、WCDMA网络能够有效剔除大误差点,提升整体定位精度,具有更好的系统鲁棒性。
蜂窝网 位置指纹 室内 置信椭圆 决策层融合
蒋思琪
重庆邮电大学,重庆市移动通信技术重点实验室,硕士研究生,研究方向为室内定位。
王向勇
重庆邮电大学,重庆市移动通信技术重点实验室,硕士研究生,研究方向为室内定位与被动入侵检测。
引言
随着移动互联网、无线通信技术的不断发展,人们对于位置服务的需求越来越高,位置服务的基础——定位技术成为国内外学者研究的热点。室内定位技术是公共安全、生产安全、应急救援、物联网、特殊人群监护、大型场馆管理、智慧城市建设等领域重点关注的内容。目前,比较典型的室内定位技术主要有基于RFID、蓝牙、红外、超声波、WLAN、MEMS定位及蜂窝网指纹定位技术等[1]。与基于RFID、蓝牙、红外、超声波、WLAN、MEMS等定位技术相比,蜂窝网指纹定位技术具有结构简单,能充分利用现有网络设施,不需要增加额外硬件设备,且不存在时间累积误差等优点[2]。由于室内环境复杂多变,单一网络模式下的基于位置指纹的定位系统精度低,且定位性能具有很大的不确定性,出现大误差点的几率大[3]。因此,为了提高单一系统的定位精度以及系统的鲁棒性,扩大定位范围,本文研究将多种网络模式下的指纹信息进行融合的定位方法。本文在单GSM、WCDMA网络下基于指纹定位技术的基础上,研究将GSM网络和WCDMA网络下的室内指纹信息进行融合,提出一种在GSM、WCDMA网络下利用接收到的小区信号RSSI值分别获得多个估计位置坐标,称之为GSM、WCDMA网络的下定位点集,根据定位点集分别构造GSM、WCDMA网络下的置信椭圆,根据置信椭圆的位置关系决策最终估计位置坐标的决策层融合定位方案。经过真实环境数据验证分析可知,本文提出的GSM/WCDMA决策层融合定位方案相较于单一网络,能有有效提高定位精度,增强定位系统鲁棒性。
1 室内指纹定位技术
蜂窝网室内位置指纹定位技术一般分为两个阶段:离线阶段和在线阶段[4]。离线阶段,在室内定位区域内各指纹点处采集多个基站小区在该点处的接收信号强度(Received Signal Strength Indication, RSSI),并与该指纹点处的位置坐标一起组合成指纹记录,建立位置指纹数据库,以下简称指纹库;在线阶段,移动终端向中心定位服务器发送从不同位置接收的小区RSSI值,服务器端通过与指纹库匹配计算出移动终端的位置信息。室内指纹定位技术基本原理如图1所示。
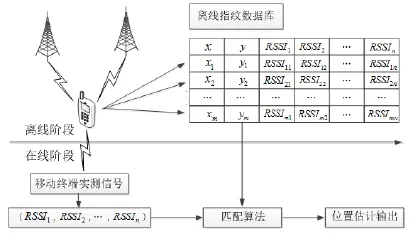
图1 室内指纹定位技术基本原理
2 置信椭圆构造
根据移动终端在线定位阶段接收到的GSM、 WCDMA网络下的多组小区信号RSSI值,分别获得多个定位坐标,对GSM、WCDMA网络下的定位点集分别构造置信椭圆。此部分主要介绍根据GSM网络下的定位点集构造置信椭圆的方法,WCDMA网络下置信椭圆的构造方法于此相同。
对于一个置信椭圆,有4个关键的参数,分别是:中心点o ,长半轴长度E ,短半轴长度F,椭圆的倾斜角φE。其中:o 是多个定位点的中心点;φE是长半轴与x 轴的夹角,它由多个定位结果在x 轴与y轴上的协方差决定;o 和φE两个参数定出椭圆的位置;E 、F两个参数反映椭圆的大小,它与多个定位结果在长半轴与短半轴上的标准差成正比[5]。中心点o 可通过公式(1)求得。

其中,pi=(xi, yi)表示第i个定位点的坐标。
设定GSM网络下得到的定位点集为P ,定位点集P 内共有n 个定位位置坐标,P={p1, p2,…,pn}。
下面将对当置信椭圆为正椭圆和斜椭圆两种情况下分别讨论长半轴长度E,短半轴长度F,椭圆的倾斜角φE的求解方式。
2.1置信椭圆为正椭圆
当x 轴与y 轴上的数据不相关时,此时φE=0,置信椭圆为正椭圆,即椭圆的长半轴和短半轴分别平行于x轴和y 轴,如图2所示。
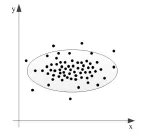
图2 置信椭圆为正椭圆
此时椭圆方程可由公式(2)表示:

在这种情况下,计算椭圆方程的步骤如下[6]:
(1)根据定位点集P构造卡方分布:
在这种情况下,长半轴和短半轴的长度与定位点集P 在x 轴与y 轴方向上的标准差成正比关系,于是公式(2)中置信椭圆的表达式可由公式(3)表示。其中:σx、σy分别表示定位点集P 在x 轴与y 轴方向上的标准差;s是一个常数,它的大小与所选取的置信度α有关。
为了使置信椭圆反映定位点集P的分布情况,需要使离中心比较近的点都出现在椭圆内,这是因为根据正态分布的特性,离中心越近,出现概率越大,这些点的分布也越集中。而那些离中心比较远的点,它们出现概率小,分布散乱,可以认为它们是偶然误差造成的,需要将它们排除出椭圆外。这里选取置信度为α,它保证占总数比例为1-α的定位结果出现在椭圆内,即:当x与y 均服从正态分布时,即x~N(x0,σx),y~N(y0,σy)时,根据正态分布与卡方分布的关系可知:其中χ(2)表示自由度为2的卡方分布。


(2)根据卡方分布求上置信界限sα:
根据表1的卡方分布表,可以求出使s 满足公式(4)的sα
(3)求正椭圆方程表达式:
对比公式(2)与公式(3),利用公式(6)可求出椭圆的长半轴长度E ,短半轴长度F。得到椭圆的长半轴长度E ,短半轴长度F后,正椭圆的表达式可表示如公式(7):2.2 置信椭圆为斜椭圆


当x 轴与y 轴上的数据相关时,即φE≠0时,这时的置信椭圆表现为一个斜椭圆的形式,如图3所示。
此时椭圆公式可由公式(8)表示。其中(x′, y′)表示正椭圆坐标轴旋转φE后的坐标。
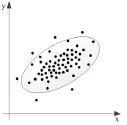
图3 置信椭圆为斜椭圆
在这种情况下,计算椭圆的倾斜角φE、长半轴长度E ,短半轴长度F这3个参数的步骤如下。
(1)计算这n 个定位点的协方差矩阵R :
协方差矩阵R 可表示如公式(9):其中:rxx,ryy,rxy分别表示n 个定位点在x轴上的方差、在y 轴上的方差、在x 轴与在y轴上定位结果的协方差。

(2)对R进行特征值分解:
利用公式(10)对协方差矩阵R 进行特征值分解,求得R 的两个特征值λ1, λ2( λ1>λ2>0)与其对应的特征向量v1, v2。

(3)计算φE、E 、F :
根据矩阵特征值分解的性质可知,定位结果在v1、v2方向上不相关,且在v1、v2方向上定位结果的方差分别为、λ2,由此可知置信椭圆的长半轴和短半轴分别在v1、v2方向上。置信椭圆与x 轴的夹角φE可由公式(11)计算得到:其中:v1( x)、v1(y)分别表示向量v1在x 轴与y 轴上的投影。
由公式(6)可知,置信椭圆的长半轴长度E,短半轴长度F 分别为:(4)计算斜椭圆方程表达式:

计算出φE、E 、F 之后,可以根据倾斜角φE和坐标轴旋转公式(13)来计算旋转后的坐标(x′, y′)与(x0′,y0′)。


至此,完成了根据GSM网络下的定位点集构造置信椭圆的实施步骤,WCDMA网络下置信椭圆的构造方法于此相同。
3 基于置信椭圆的融合定位
针对单蜂窝网环境下基于位置指纹定位技术中离线指纹数据库的建立、移动终端实时数据的采集、在线匹配定位的特点,提出一种GSM/WCDMA决策层融合定位方法。基本原理为:根据移动终端在GSM、WCDMA网络下接收到的实时数据,利用匹配算法分别求得GSM、WCDMA网络下的定位点集,然后对GSM、WCDMA网络下的定位点集构造置信椭圆,根据置信椭圆的位置关系决策移动终端位置坐标。决策层融合定位方案结构框图如图4所示。
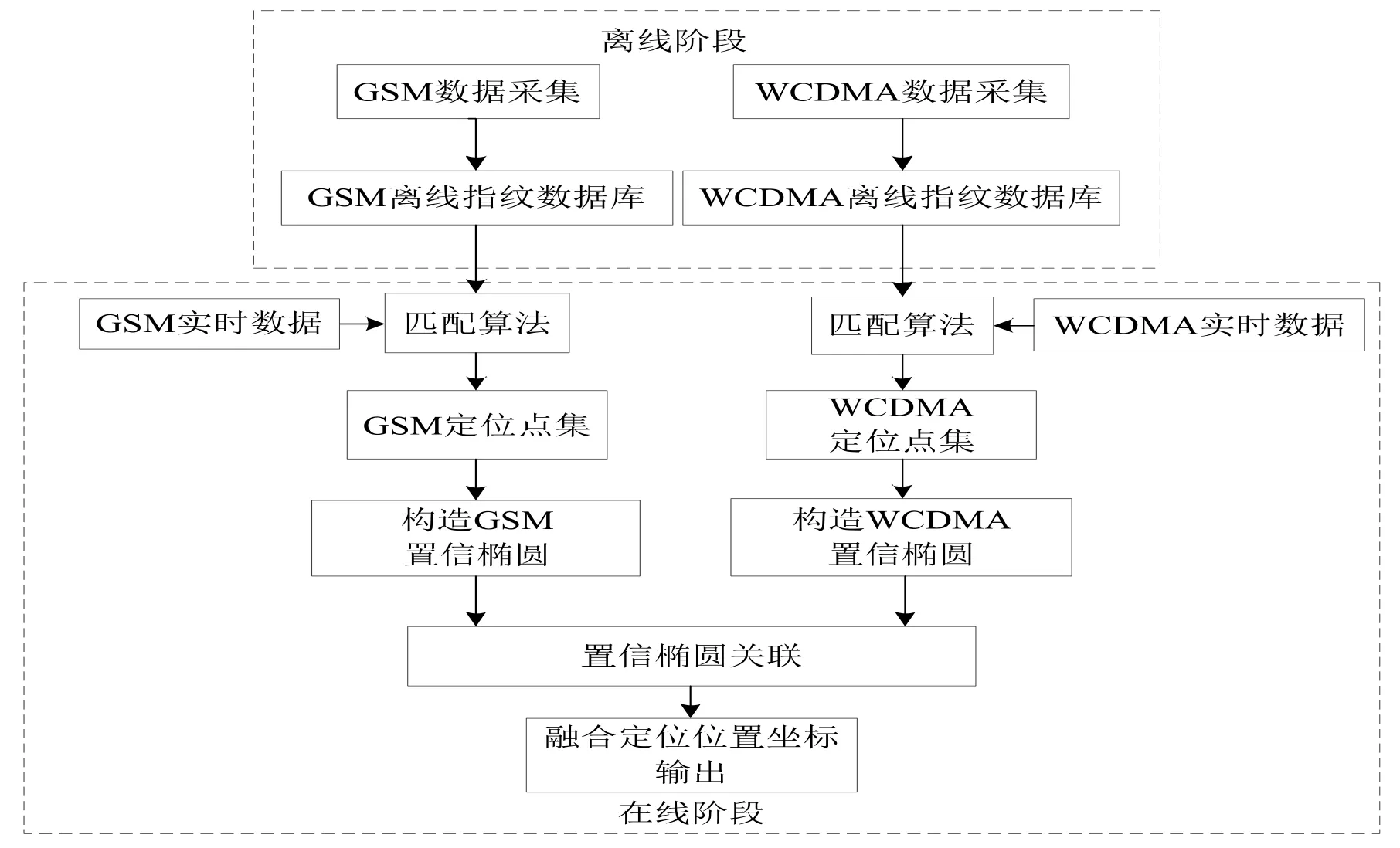
图4 GSM/WCDMA决策层融合定位结构框图
离线阶段,分别建立GSM、WCDMA网络下的离线指纹数据库;在线定位阶段,分别根据移动终端实时监测到的GSM、WCDMA网络基站小区的RSSI值在相应的子数据库中进行匹配运算,分别获得GSM、WCDMA网络下的定位点集,利用上面讲述的方法分别构造GSM、WCDMA定位点集的置信椭圆。此时,GSM、WCDMA置信椭圆的位置关系可能有3种情况,下面将分情况讨论。
3.1置信椭圆相内含
此时的GSM、WCDMA置信椭圆的位置关系如图5所示。

图5 GSM、WCDMA置信椭圆相内含
此种情况下,小置信椭圆中的定位结果均落在大置信椭圆的椭圆定位区域内。由于小置信椭圆的数据方差小,定位结果集中程度高,而大置信椭圆的定位结果相对来说比较发散,可信度较低。因此让大置信椭圆的定位结果信任于小置信椭圆的定位结果,将小置信椭圆的中心坐标作为最终融合定位的定位坐标输出。此时融合定位的估计位置坐标(x, y)表示为:

3.2置信椭圆相交
此时的GSM、WCDMA置信椭圆的位置关系如图6所示。
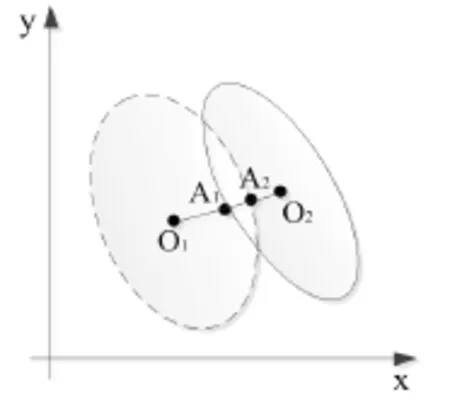
图6 GSM、WCDMA置信椭圆相交
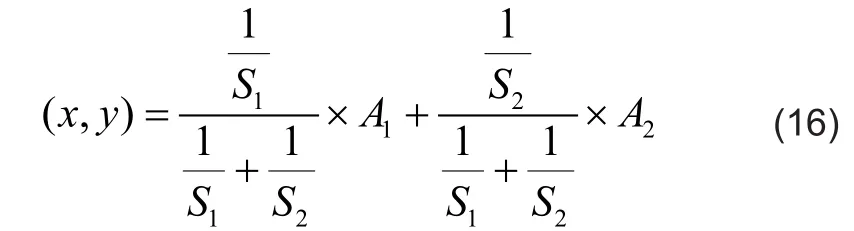
此种情况下,两个系统可能的定位结果相互交叉,显然两个椭圆相交的部分的定位结果更加可信。设两个椭圆的面积分别是S1、S2,两个椭圆圆心O1、O2的连线与这两个椭圆的交点分别为A1、A2。由于置信椭圆圆心位置坐标是单一网络下最优的估计位置坐标,因此,融合定位结果应该在线段A1A2上进行搜索。椭圆的面积反映定位点的集散程度,椭圆面积越小,表示定位点集中度越高,则此椭圆中心定位结果越可信。因此,将两个椭圆相交部分的面积占所在置信椭圆的比例的权重结合交点A1、A2的坐标输出最终估计位置坐标。此时定位结果输出如公式(16)所示为:
3.3置信椭圆相离
此时的GSM、WCDMA置信椭圆的位置关系如图7所示。

图7 GSM、WCDMA置信椭圆相离
此种情况下,两个网络下构造的置信椭圆相离,则移动终端实际位置坐标最有可能出现在两个置信椭圆最接近的部分处。因此,根据两个置信椭圆的位置找到两个椭圆距离最近的两个点A1、A2,利用公式(16)求出融合定位的估计位置坐标。
4 算法验证与分析
4.1实验环境
本文在真实环境下搭建平台、采集数据来验证所研究算法的有效性。实验场景选择在面积为57m×42m的重庆邮电大学逸夫楼五楼室内和走廊,并在该场景下进行真实GSM、WCDMA蜂窝网无线参数的采集,如图8所示。图中的小黑点“·”为建立位置指纹数据库时布置的指纹点,坐标原点选在图中红色圆点处。实验场景内共布置了204个指纹点,其中区域1中布置了92个指纹点,区域2中布置了82个指纹点,指纹点之间间隔为1.2m;区域3(室内)布置30个指纹点,其沿X轴方向间隔为3m,沿Y轴方向间隔为1.2m。算法运行软件平台为Windows 7系统;硬件平台为:处理器Inter(R)Core(TM)i3-2120,内存4GB。
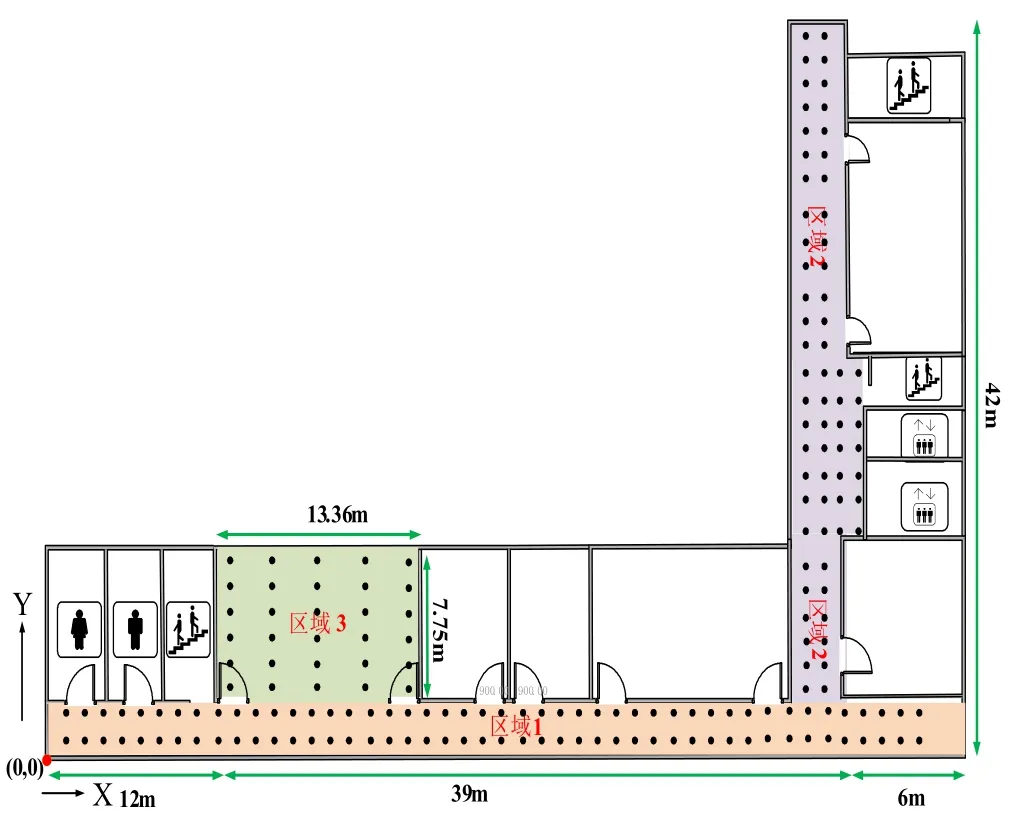
图8 实验环境平面图
4.2实验结果分析
根据真实数据验证分析得到GSM/WCDMA决策层融合定位方案与单GSM、WCDMA网络定位精度的CDF曲线对比图,如图9所示。
由图9可知,GSM/WCDMA决策层融合定位定位性能明显优于单GSM、WCDMA网络下的定位性能,且有效提出了大误差点,提升了整体的定位性能。
GSM/WCDMA决策层融合定位方案与单GSM、WCDMA网络定位精度对比如表1所示。
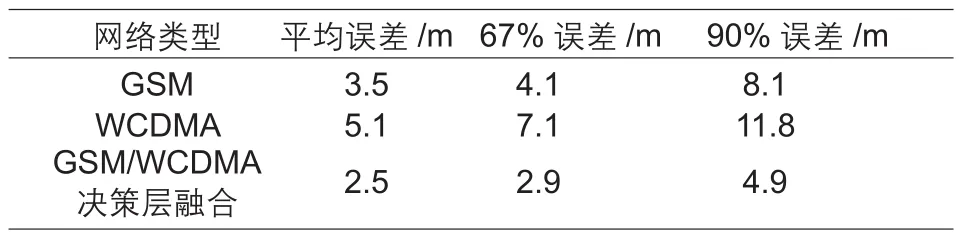
表1 GSM/WCDMA决策层融合定位与单GSM、WCDMA网络定位精度CDF图
如表1所示,GSM/WCDMA决策层融合定位方案将单GSM、WCDMA网络定位平均定位误差提升至2.5m,67%误差提升至2.9m,90%误差提升至4.9m,精度提升明显。综合图9和表1的定位结果可知,本文提出的GSM/WCDMA决策层融合定位方案能够有效剔除大误差点,提升定位精度,获得了更好的系统鲁棒性。

图9 GSM/WCDMA决策层融合定位与单GSM、WCDMA网络定位精度CDF图
5 结束语
由于目前基于位置服务的需求越来越多,对高精度室内定位的研究具有重要的现实意义。
本文在蜂窝网环境下基于位置指纹的室内定位技术的基础上,研究了一种针对多网络模式指纹信息融合的GSM/ WCDMA决策层融合定位方案。此方案根据GSM、WCDMA网络下移动终端在线阶段接收小区RSSI值获得多个估计位置坐标。根据GSM、WCDMA网络下定位点集构造置信椭圆,最后根据置信椭圆的位置关系决策出移动终端最终估计位置坐标。在真实实验场景下采集GSM、WCDMA数据进行验证,实验结果表明本文提出的GSM/WCDMA决策层融合定位方案相对于单一GSM、WCDMA网络能够有效剔除大误差点,提高整体定位精度。
1 陈永光, 李修和. 基于信号强度的室内定位技术[J]. 电子学报,2004, 32(9):1456-1458
2 Liu X D, Wei H, Tian Z S. The Improvement of RSS-based Location Fingerprint Technology for Cellular Networks[C]// International Conference on Computer Science and Service System. IEEE Computer Society, 2012:1267-1270
3 Huang C M, Hsieh T H, Lin S Y. A Signal-Aware Fingerprinting-Based Positioning Technique in Cellular Networks[J]. IEEE, 2011:325-332
4 周傲英, 杨彬, 金澈清, 等. 基于位置的服务:架构与进展[J].计算机学报, 2011, 34(7): 1155-1171
5 杨士英, 罗景青. 利用误差椭圆消除虚假定位的算法研究[J].电子信息对抗技术, 2004, 19(5): 3-6
6 张宇辛, 卞鸿巍, 王荣颖. 一种基于误差椭圆的卫导精度评估方法研究[J]. 计算机与数字工程, 2014, 42(3):364-368
10.3969/j.issn.1006-6403.2016.06.010
国家自然科学基金(61301126),重庆市基础与前沿研究计划项目(cstc2013jcyjA40041),重庆市基础与前沿研究计划项目(cstc2013jcyjA40032),重庆邮电大学博士启动基金(A2012-33)
(2016-05-16)
