窗口融合特征对比度的光学遥感目标检测
2016-10-10李湘眷王彩玲
李湘眷,王彩玲,李 宇,孙 皓
(1.西安石油大学,陕西 西安 710065;2.中国科学院 遥感与数字地球研究所,北京 100942;3.中国科学院 空间信息处理与应用系统技术重点实验室,北京 100190;4.中国科学院 电子学研究所,北京 100190)
窗口融合特征对比度的光学遥感目标检测
李湘眷1*,王彩玲1,李宇2,孙皓3,4
(1.西安石油大学,陕西 西安 710065;2.中国科学院 遥感与数字地球研究所,北京 100942;3.中国科学院 空间信息处理与应用系统技术重点实验室,北京 100190;4.中国科学院 电子学研究所,北京 100190)
提出了一种基于窗口融合特征对比度的光学遥感目标检测方法。首先,在训练图像上生成大量不同尺寸的滑动窗,计算了各窗口的多尺度显著度、仿射协变区域对比度、边缘密度对比度以及超像素完整度4项特征分值,在确认集上基于窗口重合度和后验概率最大化学习各个特征的阈值参数。然后,采用Naive Bayes框架进行特征融合,并训练分类器。 在目标检测阶段首先计算测试图像中各窗口的多尺度显著度分值,初步筛选出显著度高且符合待检测目标尺寸比例的部分窗口。然后计算初选窗口集的其余3项特征,再根据训练好的分类模型计算各个窗口的后验概率。最后,挑选出局部高分值的候选区域并进行判断合并,得到最终目标检测结果。针对飞机、油罐、舰船等3类遥感目标的检测结果显示:4类特征在单独描述3类目标时表现出的性能各有差异,最高检测准确率为74.21%~80.32%,而融合方案能够综合考虑目标自身特点,准确率提高至80.78~87.30%。与固定数量滑动窗方法相比,准确率从约80%提高到约85%,虚警率从20%左右降低为3%左右。最终高分值区域数降低约90%,测试时间减少约25%。得到的结果显示该方法大大提高了目标检测精度和算法效率。
光学遥感;目标检测;融合特征对比度;窗口;显著度;仿射协变;边缘密度
*Correspondingauthor,E-mail:xiangjuan_li@126.com
1 引 言
近年来,遥感图像的数据来源不断扩展,数据量不断增加,波谱、空间和时间分辨率不断提高,使得遥感传感器采集并传输到地面的图像数据量急剧增加。大量遥感图像数据为数据的解译分析提供了良好的条件,但也对高分辨率图像信息的有效利用提出了挑战。在传统中低分辨率图像上,看到的大多是大尺度下的自然景观,小尺度人造目标则不能清楚地观测到。而在近年来军事与民用的一些领域中所使用的高分辨率图像中,地物景观的结构、纹理和细节等信息表现的更加清楚,在获得丰富的地物光谱信息的同时还可以获取更多的地物结构、形状和纹理信息,使得人造目标达到了可以利用的程度。人造目标一般具有较规则的几何外形、清晰的闭合轮廓线以及与周围环境差别较大的表观特征,通常在图像中具有明显的显著性。这些特点使得它们更容易用规则性的特征进行描述。
近年来目标检测新方法层出不穷,很多性能卓越的目标检测算法仍然是基于滑动窗理论的[1-5]。基本步骤为:首先训练一个能够从训练图像所有窗口中识别出目标窗口的分类器,然后使用该分类器在测试图像中给每个子窗口评分,取得局部最大分值的窗口被认为可能包含目标的窗口。一个“理想”的滑动窗分类器应该使得恰好包含目标的窗口得分最高,覆盖部分目标的窗口得分相对较低,而覆盖背景的窗口得分最低。然而遥感图像数据量庞大,采用传统滑动窗检测方法会产生大量子窗口,从而降低目标检测效率。另外,特征提取环节的差异也会对目标检测性能产生影响。一个好的特征描述方案可以增大相似类别的匹配分值,同时拉大不同类别之间的距离。特征描述的一类方法是主要利用目标的颜色、纹理或几何特征进行描述[6-11],该类方法简单直观,但是不同目标通常会表现出不同特征,例如飞机具有较明显的角点,而油罐表面灰度分布均匀,因此在复杂遥感环境中使用单一特征描述目标往往不可靠。另一类方法则是综合利用目标的颜色、纹理、形状、位置等多类特征,通过自适应的概率学习融合处理[12-19],然而遥感目标通常具有不同尺寸,在不同尺度上表现出的显著程度也不同。另外,由于受到传感器高度、搭载平台姿态变化、地球自转、地形地貌、光照变化等客观因素的影响,遥感图像在实际成像过程中会发生变形,表现在图像发生尺度与视角变化、旋转、模糊、亮度变化等。即使考虑同一幅遥感图像,其中的多个目标也可能处于不同的角度,这些因素都给人造目标的检测增加了难度。
本文提出了一种基于窗口融合特征对比度的光学遥感目标检测方法。该方法可分为特征提取、模型训练和模型测试,在特征提取阶段:提出了一种基于仿射协变兴趣点检测子的特征,即仿射协变区域对比度(Affine Contrast,AC),用于衡量某窗口内部特征区域与周围区域的平均特征差异;改进了边缘密度(Edge Density,ED)特征,提出了基于四通道梯度图像最大值(Maximum of OE channels,MOE)的MOE-ED特征,用于衡量某窗口边界区域包含闭合轮廓的可能性。在模型训练阶段:首先在训练图像上生成大量不同尺寸的滑动窗,计算各窗口的多尺度显著度(Multi-scale Saliency,MS)分值、AC分值和MOE-ED分值;为了考虑窗口包含目标的完整度,同时采用基于窗口与超像素之间的跨越关系(Superpixels Straddling,SS)计算窗口的SS分值,其中特征阈值参数是基于窗口重合度以及后验概率最大化过程学习得出的;然后,采用Naive Bayes模型进行特征融合,从训练窗口中确定正负样本、估计先验概率以及各特征的独立似然概率。在模型测试阶段:首先按照与训练过程一致的流程计算各窗口的MS分值,初步筛选出显著度高且符合待检测目标尺寸比例的部分窗口;然后计算初选窗口的AC、MOE-ED和SS分值,根据训练好的分类模型计算各个窗口的后验概率,即属于目标的可能性;最后挑选出局部高分值的候选区域并进行合并,得到最终的检测结果。最后,针对典型遥感目标进行检测实验。
2 特征描述
2.1基于谱残差的多尺度显著特征

(1)
由于不同图像数据部分log谱的分布特点相似。因此,不同的log谱中的差异部分对应原始图像中变化剧烈的区域,即显著区域。

(2)

(3)

(4)

(5)
其中θs表示特定尺度的阈值,|·|表示求面积。
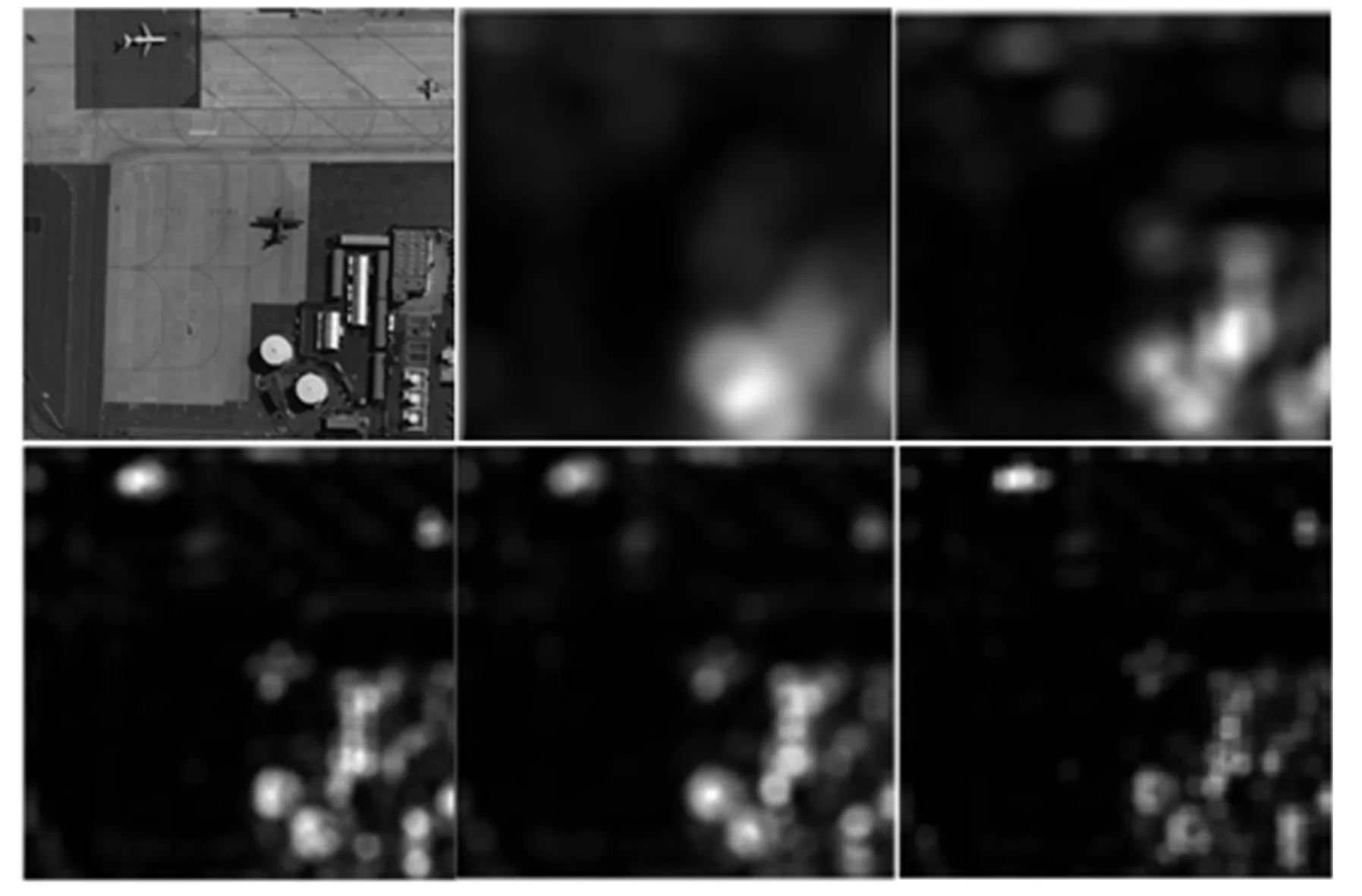
图1 多尺度显著性示意图Fig.1 Multi-scale saliency
图1所示为包含油罐和两架飞机的光学遥感图像,可见油罐在粗尺度显著度图上表现出高亮度,而两架飞机目标则在细尺度体现为显著区域。由此可见,在多尺度上检测显著性对于多目标检测具有重要意义。
2.2仿射协变区域对比度
Hessian-Affine 检测子[21]常用于计算仿射协变区域对比度,其首先在高斯尺度空间使用Hessian矩阵及其行列式DoH检测出初始的特征点,然后搜索DoH局部极值来选择特征点的位置和特征尺度,最后使用迭代算法不断调整特征点的空间位置、尺度以及邻域的形状,找到收敛后的仿射协变区域。Hessian-Affine检测子对于明显的尺度变化和视角变化等具有较强适应性,可以降低特征的误配率,从而更准确地识别出不同仿射变换和不同光照变化图像中对应的相似特征区域。
本文首先提取图像的Hessian-Affine椭圆仿射协变区域,然后用SIFT(Scale Invariant Feature Transform)描述子进行描述,形成特征点对应的特征向量X。为了描述某特征区域R的独特性,将当前区域按照参数θAC向外扩大得到区域R(θAC),二者之间的关系如式(6)所示。

(6)
接下来,重新计算扩大区域的SIFT特征向量,并将二者的χ2距离作为该区域形状对比度的度量。
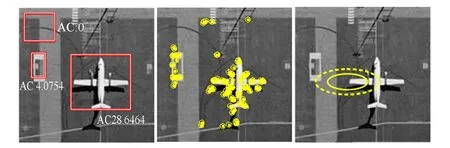
(a) AC分值 (b)特征点 (c)特征区域 (a) AC scores (b) Feature points (c) Feature regions图2 仿射协变区域对比度示意图Fig.2 Affine invariant region contrast
图2(a)所示为光学遥感图像的典型目标,图(b)所示为图像的部分Hessian-Affine特征点,图(c)所示为扩大前后的某椭圆仿射协变区域示意图(实线为原始区域,虚线为扩大区域)。由于检测窗口可能覆盖多个特征点,为了描述当前检测窗口w的形状独特性,本文将窗口覆盖的所有特征点对应的特征区域AC之和作为度量指标,如公式(7)所示:

(7)
2.3边缘密度对比度
由于遥感图像中的典型目标均具有明显的规律性闭合轮廓,与诸如海面、跑道等背景地物具有较明显的区别,因此本文采用边缘密度对比度(Edge Density, ED)来描述目标的轮廓特征。ED特征描述的是窗口边界边缘处的密度特征。首先对图像进行边缘检测,提取图像的轮廓信息。与文献[22]中采用Canny算子不同,本文采用四通道梯度算子(Oriented Edge,OE)来提取原图像4个方向上的边缘,然后通过非极大值抑制方法[23]去掉次要的细小轮廓,保留最大轮廓。最终的轮廓图像由四通道梯度图像中的最大值(Maximum of OE channels,MOE)组合而成。提取出轮廓之后,对当前窗口w按照参数θED进行缩小,得到一个内部环形区域Inn,在此环形区域内计算ED特征。如式(8)所示:

(a) ED分值 (b)Canny边缘图 (c) MOE边缘图(a) ED score (b) Canny edge map (c) MOE edge map图3 Canny-ED与MOE-ED比较Fig.3 Comparison of Canny-ED and MOE-ED
MOE-ED特征描述的是窗口边缘附近目标的闭合边界特性。图3所示为特征提取结果。图3(b)和图3(c)分别表示Canny算子和MOE算子的轮廓提取结果,可见MOE边缘检测子能够更好地保留主要轮廓,去除细小、次要的其他轮廓。针对包含目标和不包含目标的两个窗口计算出的特征分值图为图3(a),可以看出,MOE-ED更能拉大不同目标之间的距离,具有更好的区分性。
2.4超像素完整度
由于AC和MOE-ED特征描述的是目标的边界信息,而遥感图像中诸如油罐等目标表面没有明显的拐点,表面灰度分布均匀,边缘信息不丰富。因此还需要对目标的成块区域进行描述。超像素[24]分割就是把一幅图像分割成具有均匀颜色或纹理的子区域。超像素的重要特性是可以保留目标的边界,即一个超像素内的像素均属于同一个目标。因此,一个目标有可能被过分割成多个超像素,但是一个超像素不会跨越目标之间的边界。因此,本文采用窗口与超像素之间的SS来计算窗口分值。

(9)
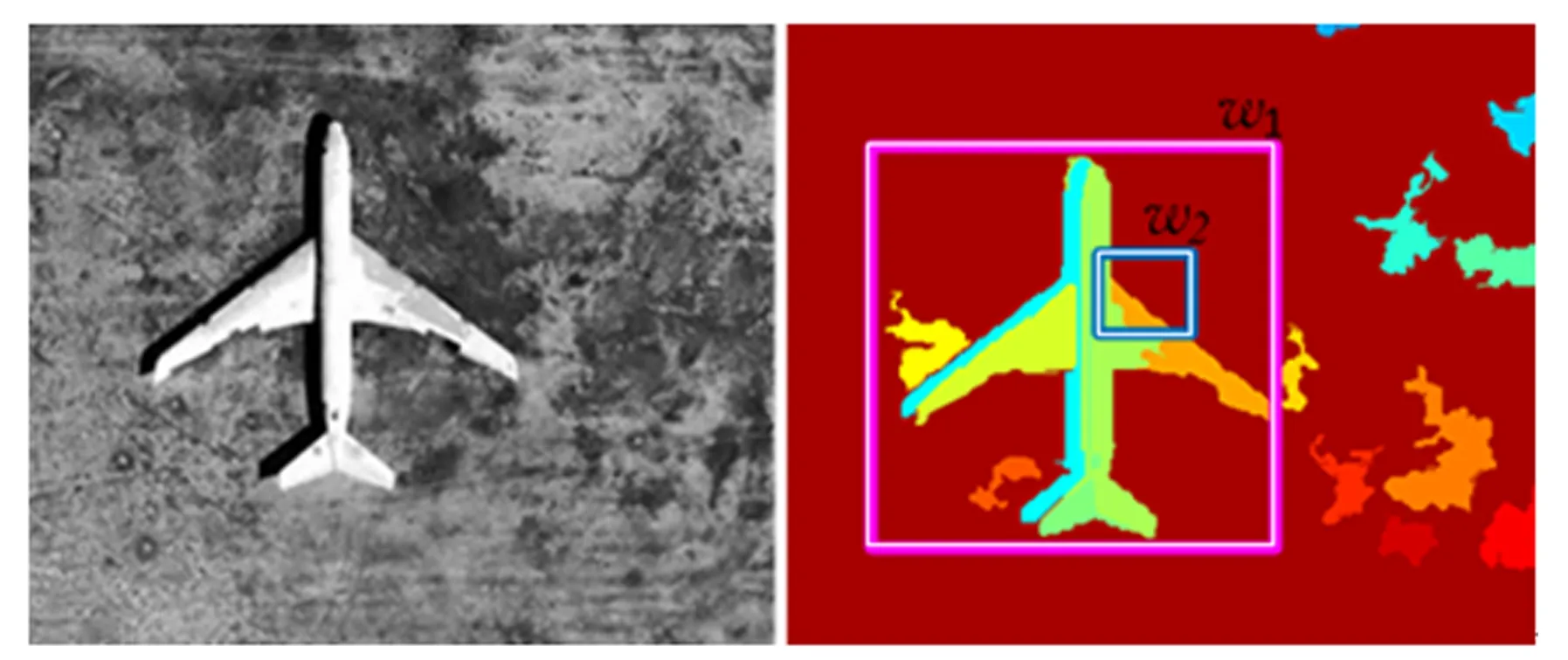
(a) 原始图像 (b)分割图(a) Original Image (b) Segmentation image图4 SS特征示意图Fig.4 Schematic of SS feature
3 基于贝叶斯理论的分类模型
3.1特征参数的训练


(10)

(11)

3.2分类模型的训练与测试
MS可以根据显著度图粗略给出目标的大致位置,AC侧重的是判断目标是否具有明显拐点,对于没有明显拐点的目标可能会失效,而MOE-ED统计的是目标的闭合轮廓特性,但有时候也会出现大量纹理区域的虚警。SS特征能够考察窗口内超像素的完整度,但不同的超像素有可能属于不同目标。因此,有必要将各种特征结合起来使用,以更全面地描述目标,使目标和背景区分的更好。

(12)
本文基于以下原则进行候选窗口合并:
(1)分值高于一定阈值的区域选做候选区域。分值越高,该子区域包含目标的可能性越大;
(2)属于同一类别的区域彼此重叠超过70%的采用K均值聚类的方法进行合并;
(3)相邻的重叠区域应该被合并,但是发生在不同尺度上的重叠或属于不同类别的区域不应被合并。

图5 目标检测流程Fig.5 Object detection process
4 实验结果与分析
4.1使用的数据集
为了验证本文提出的方法在复杂场景下目标检测的有效性,选用从QuickBird-2遥感图像上截取的图像作为数据集,主要场景为机场、港口和海面,如图6所示。需要检测的目标为飞机、油罐、舰船3类。数据集由人工截取的图像片组成,这些图像都是分辨率约为0.6 m的高分辨率遥感图像,每幅图像大小约从300 pixel×300 pixel到1 000 pixel×1 000 pixel,每幅图像包含一个或多个目标。实验中使用了300幅/类图像,其中150幅/类用于作为训练样本,150幅/类用于作为测试样本。训练特征阈值参数θ时随机从训练集中分出来的一小部分确认集,数量为50幅/类。数据集上事先人工标注出真实目标所在范围,并记录外接矩形框的位置,用于特征参数和贝叶斯分类模型的计算。

图6 训练数据集Fig.6 Training datasets
4.2参数设置

4.3目标检测结果分析
图7(彩图见期刊电子版)给出了一些测试图像的窗口分值分布结果,图7(a)表示一些包含目标的测试图像,7(b)表示得分最高的5个窗口,红色越明亮,表示分值越高,颜色越暗,表示分值越低。图7(c)表示统计分值靠前的150个窗口之后得到的能量分布图,可以看到,能量在目标范围内较为集中,越靠近目标中心点,分值越高,而背景区域得分较低,证明了本文所提出方法的有效性。

(a) 测试图像 (b)前五个检测窗口 (c) 总体分值分布(a)Test images (b) The first five det- (c) Total scores ection windows distribution图7 窗口分值分布Fig.7 Distribution of window scores
图8为包含更多目标的测试图像的最终检测结果。可以看出,本文提出的算法能够在复杂的场景下,有效地将不同角度、不同尺度的目标同时检测出来。观察图8可以发现,存在检测框与目标略有套合不够准确的现象,分析原因主要有3点:(1)受目标阴影影响。例如油罐的检测框会略偏向阴影区域的方向,原因是由于阴影区域与背景对比更强,且轮廓更为清晰,可能会取得更高的窗口分值。(2)滑动窗是按照一定步长移动的;(3)最后的检测框是由多个候选区域合并的结果。从图中还可以看出,对于特别微小的目标也存在漏检的可能性。例如第2行第4列中包含的小舰船目标),这是因为目标过小有可能导致其显著度不明显且闭合长轮廓较少,从而窗口得分较低。
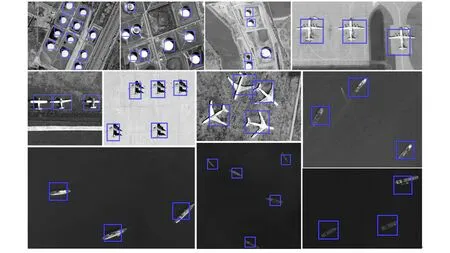
图8 目标检测结果Fig.8 Detection results
表1所示为针对飞机、油罐、舰船3类典型遥感目标,利用本文提出的算法、其他单独特征窗口方法以及其他融合方法进行检测,统计出的平均准确率。可以看出,对于油罐目标,4种单特征方案中MOE-ED特征的准确率最低,这是因为油罐顶部灰度分布较为平坦,除了外部轮廓以外,内部边缘较少,因此MOE-ED分值会较低。MS特征检测的准确率在单特征方案中最高,这是由于油罐区域像素值较高,通常和背景形成强烈对比,显著性较为明显,因此MS分值得分较高。对于飞机目标而言,MOE-ED特征性能较油罐而言明显上升,而MS准确率有所下降,这是由于飞机颜色和机场背景区分性远不如油罐,导致显著性明显下降。得分最高的单特征方案是AC特征,这是因为飞机目标具有较多明显的角点,目标附近的仿射协变区域数量大大增加。对于舰船目标而言,大部分单独特征方案准确率均有所提高,这是由于作为背景的海面灰度分布较为均匀,因此舰船检测率较高。取得最佳结果的单独特征方案是SS特征,这是由于在图像分割阶段,由于背景和目标对比明显,出现过分割的可能性降低,能够获得较为完整的目标区域,因此SS分值区分度更强。综上所述,不同特征在描述不同目标时,描述能力也会发生变化,因此在检测多种目标时,需要结合多种特征。表1中所示的3种特征融合方案中,MS+MOE-ED+AC+SS方案由于综合考虑了目标在显著性、闭合轮廓、纹理、角点等方面的特点,均能取得最佳的检测结果。

表1 不同特征描述方案目标检测性能比较(%)
从数据集中挑选出3幅不同尺寸的图像,计算在各种特征描述方案下每幅图像的平均检测时间。实验的硬件环境为:Intel(R) Core(TM) i7-5500U(2.4GHz)处理器和8.0G内存,操作系统为基于Linux系统的Fedora 22。表2为检测不同尺寸图像所需的时间。可以看出,影响测试时间的主要因素有2个:(1)图像大小;(2)图像纹理的丰富程度。一般情况下,随着图像尺寸的加大,耗时也会相应增加。但是如果图像内容比较单一,那么检测出的角点、边缘等特征数则会相应降低,所需时间也会减少。在各种单独特征方案中,AC特征所需的时间最长,这是因为Hessian-Affine复杂度较高,其中涉及到初始点检测、自动尺度选择和形状适应迭代。在特征融合方案中,由于本文算法需要提取的特征类别最多,因此耗时较长。

表2 不同特征描述方案检测时间比较
为了进一步评价算法的综合性能,采用固定窗口数量的传统滑动窗方法[25]和本文方法进行比较(为了便于比较,窗口分值采用相同方式进行计算),并在测试集上进行目标检测,其中固定滑动窗方法采用在图像上生成100 000个均匀分布的大小不同的子窗口进行检测。3类目标的检测准确率和虚警率如表3所示。本文方法由于在检测中间阶段利用显著度提取出显著区域,并且及时筛选出符合目标特性的候选窗口,使得最终的平均准确率从约80%提高到约85%,平均虚警率从约20%降低为约3%。虚警的产生主要有几种情况:(1)块状目标或背景上的格状区域容易被误检为油罐;(2)条状码头等地物容易被误检为舰船;(3)机场背景中的房屋较多处可能检测为飞机。整体来说,海面舰船虚警最低,这是由于海面背景和舰船具有较大差异。另外,本文还对3类目标的平均候选区域数和平均检测时间进行了统计,结果如表4所示。可见本文方法平均候选区域数减少约90%以上,平均测试时间降低大约25%左右。

表3 准确率与虚警率比较
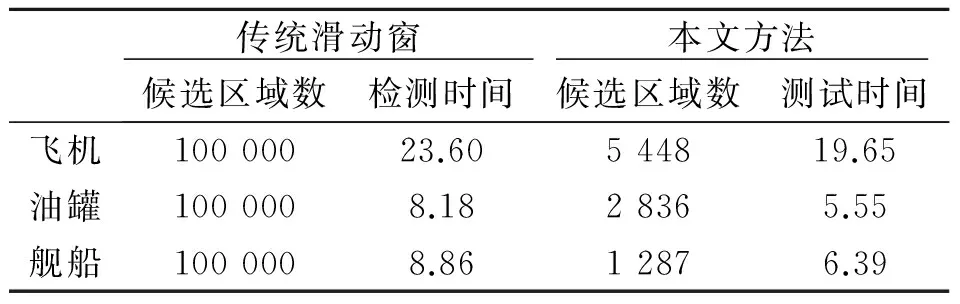
表4 区域数与检测时间比较
5 结 论
本文提出一种基于窗口融合特征对比度的目标检测方法。首先在训练图像上生成滑动窗,计算各窗口的MS、AC、MOE-ED以及SS 4项特征分值,在确认集上基于窗口重合度和后验概率最大化学习各个特征的阈值参数,然后采用Naive Bayes框架进行特征融合,并训练分类器。目标检测阶段首先计算各个窗口的MS分值,初步筛选出显著度高且符合待检测目标尺寸比例的部分窗口,然后计算其余3项特征分值,再根据分类器计算各窗口的后验概率,通过挑选出局部高分值的候选区域并进行合并,得到最终目标检测结果。实验结果表明:单一特征的检测准确率最高为74.21%~80.32%,而融合方案由于能够综合考虑目标在显著度、角点、闭合轮廓以及分割完整度等方面,准确率提高至80.78%~87.30%。与固定数量滑动窗方法相比,由于本文方法及时筛选出候选窗口,准确率从约80%提高到约85%,虚警率从约20%降低为约3%。最终高分值区域数降低约90%,测试时间减少约25%。
本文方法提高了算法效率,更适用于遥感相关的实际应用中。然而,滑动窗由于形状较为固定,从而具有一定程度的不灵活性,无法完全避免小目标漏检和大目标残缺的情况,结合图像分割的方法自适应地分割出完整目标,是本文进一步的研究方向。
[1]DESAI C, RAMANNAN D, FOLKESS C. Discriminative models for multi-class object layout [J].InternationalJournalofComputerVision, 2011, 95(1):1-12.
[2]FELZENSZWALB P F, GIRSHICK R B, DAVID M A,etal.. Object detection with discriminatively trained part-based models [J].IEEETransactionsonPatternAnalysisandMachineIntelligence, 2010,32(9):1627-1645.
[3]LONG C, WANG X, HUA G,etal.. Accurate object detection with location relaxation and regionlets relocalization [C].AsianConferenceonComputerVision,Singapore, Nov 1-5, 2014: 260-275.
[4]LAMPERT C H, BLASCHKO M B, HOFMANN T. Beyond sliding windows: Object localization by efficient subwindow search [C]. 2008IEEEConferenceonComputerVision&PatternRecognition,USA,June24-26, 2008: 1-8.
[5]ZHANG S,XIE M. Beyond sliding windows: Object detection based on hierarchical segmentation model [C].IEEEInternationalConferenceonCommunications,Hungary, Jun 9-13, 2013:263-266.
[6]张志龙, 杨卫平, 张淼, 等. 基于频谱残留变换的红外遥感图像舰船目标检测方法[J]. 电子与信息学报, 2015,37(9): 2144-2150.
ZHANG ZH L, YANG W P, ZHANG M,etal.. Ship detection in infrared remote sensing images based on spectral residual transform [J].JournalofElectronics&InformationTechnology, 2015, 37(9): 2144-2150. (in Chinese)
[7]高立宁, 毕福昆, 龙腾, 等. 一种光学遥感图像海面舰船检测算法[J]. 清华大学学报(自然科学版), 2011, 51(1):105-110.
GAO L N, BI F K, LONG T,etal.. Ship detection algorithm for optical remote sensing images [J].JTsinghuaUniv(Sci&Tech), 2011, 51(1):105-110. (in Chinese)
[8]MOHAMMAD A, HOSSEIN E. Accurate object detection using local shape descriptors [J].PatternAnalysisandApplication, 2015,18(2): 277-295.
[9]WANG X, LV Q, WANG B,etal.. Airport detection in remote sensing images: a method based on saliency map [J].CognitiveNeurodynamics, 2013, 7(2):143-154.
[10]聂海涛,龙科慧,马军,等.采用改进尺度不变特征变换在多变背景下实现快速目标识别[J].光学 精密工程, 2015, 23(8): 2349-2355.
NIE H T, LONG K H, MA J,etal.. Fast object recognition under multiple varying background using improved SIFT method [J].Opt.PrecisionEng., 2015, 23(8): 2349-2355. (in Chinese)
[11]周姣, 辛云宏. 基于显著性与尺度空间的红外弱小目标检测[J]. 激光与红外, 2015, 45(4): 452-456.
ZHOU J, XIN Y H. Infrared dim small target detection based on saliency and scale-space [J].Laser&Infrared, 2015, 45(4): 452-456. (in Chinese)
[12]张宇, 何楚, 石博, 等. 逐层特征选择的多层部件模型用于遥感图像飞机目标检测[J]. 武汉大学学报(信息科学版), 2014, 39(12): 1406-1411.
ZHANG Y, HE CH, SHI B,etal.. Multi-layer feature selection based hierarchal component model for aero-plane detection on remote sensing image [J].GeomaticsandInformationScienceofWuhanUniversity, 2014, 39(12): 1406-1411. (in Chinese)
[13]安彧, 王小非, 夏学知, 等. 海战场光学遥感图像舰船目标检测[J]. 武汉大学学报(工学版), 2015, 48(4): 568-573.
AN H, WANG X F, XIA X ZH,etal.. Detection of sea battlefield’s ship targets in optical remote sensing images [J].EngineeringJournalofWuhanUniversity, 2015, 48(4): 568-573. (in Chinese)
[14]LI Y, WANG S, TIAN Q,etal.. Learning cascaded shared-boost classifiers for part-based object detection [J].IEEETransactionsonImageProcessing, 2014, 23(4): 1858-1871.
[15]LEIBE B, LEONARDIS A, SCHIELE B. Robust object detection with interleaved categorization and segmentation [J].InternationalJournalofComputerVision,2015,77(1-3):259-289.
[16]李平,魏仲慧,何昕,等. 采用多形状特征融合的多视点目标识别[J]. 光学 精密工程,2014, 22(12): 3368-3376.
LI P, WEI ZH H,HE X,etal.. Object recognition based on shape fearure fusion under multi-views [J].Opt.PrecisionEng., 2014, 22(12): 3368-3376. (in Chinese)
[17]谭熊,余旭初,张鹏强,等.基于多核支持向量机的高光谱影像非线性混合像元分解[J].光学 精密工程, 2014, 22(7): 1912-1920.
TAN X, YU X CH, ZHANG P Q,etal.. NonLinear mixed pixel decomposition of hyperspectral imagery based on multiple kernel SVM [J].Opt.PrecisionEng., 2014, 22(7): 1912-1920. (in Chinese)
[18]杜杰, 吴谨, 朱磊. 基于区域特征融合的RGBD显著目标检测[J].液晶与显示, 2016, 31(1):117-123.
DU J, WU J, ZHU L, RGBD salient object detection based on regional feature integration[J].ChineseJournalofLiquidCrystalsandDisplays, 2016, 31(1):117-123. (in Chinese)
[19]邓丹, 吴谨, 朱磊, 等. 基于纹理抑制和连续分布估计的显著性目标检测方法[J].液晶与显示, 2015, 30(1): 120-125.
DENG D, WU J, ZHU L,etal.. Significant target detection method based on texture inhibition and continuous distribution estimation [J].ChineseJournalofLiquidCrystalsandDisplays, 2015, 30(1): 120-125. (in Chinese)
[20]HOU X, ZHANG L. Saliency detection: A spectral residual approach[C].IEEEConferenceonComputerVisionandPatternRecognition, 2007: 1-8.
[21]MIKOLAJCZYK K, SEHMID C. Scale & affine invariant interest point detectors [J].InternationalJournalonComputerVision, 2004, 60(1):63-86.
[22]ALEXE B, DESELAERS T, FERRARI V. Measuring the objectness of image windows [J].IEEETransactionsonPatternAnalysisandMachineIntelligence,2012, 34(11): 2189-2202.
[23]MARTIN D, FOWLKES C, MALIK J. Learning to detect natual image boundaries using local brightness, color, and textures cues[J].PAMI, 2004, 26(5): 530-549.
[24]FELZENSZWALB P F, HUTTENLOCHER D P. Efficient graph-based image segmentation[J].InternationalJournalonComputerVision, 2004, 59(2):167-181.
[25]孙显,王宏琦,杨志峰. 基于形状统计模型的多类目标自动识别方法[J]. 电子与信息学报, 2009, 31(11): 2626-2631.
SUN X, WANG H Q, YANG ZH F. Automatic multi-categorical objects recognition using shape statistical models[J].JournalofElectronics&InformationTechnology, 2009, 31(11): 2626-2631. (in Chinese)

李湘眷(1984-),女,陕西西安人,博士,讲师,2006年于西安电子科技大学获得学士学位,2012年于北京中国科学院电子学研究所获得博士学位,主要从事遥感图像处理与模式识别方面的科研和教学工作。E-mail: xiangjuan_li@126.com

王彩玲(1984-),女,宁夏吴忠人,博士,讲师,2006年于天津大学获得学士学位,2011年于中国科学院西安光学精密机械研究所获得博士学位,主要从事遥感影像数据处理技术方面的科研和教学工作。E-mail:azering@163.com
(版权所有未经许可不得转载)
Optical remote sensing object detection based on fused feature contrast of subwindows
LI Xiang-juan1*, WANG Cai-ling1, LI Yu2, SUN Hao3,4
(1.Xi′anShiyouUniversity,Xi′an710065,China;2.InstituteofRemoteSensingandDigitalEarth,ChineseAcademyofSciences,Beijing100942,China; 3.KeyLaboratoryofTechnologyinGeospatialInformationProcessingandApplicationSystem,InstituteofElectronics,ChineseAcademyofSciences,Beijing100190,China; 4.InstituteofElectronics,ChineseAcademyofSciences,Beijing100190,China)
A detection algorithm for optical remote sensing targets was proposed based on the fused features contrast of subwindows. Firstly, a large number of varisized sliding windows were generated in a training image, and four types of scores related to multi-scale saliency, affine invariant region contrast, edge density and superpixel straddling were computed within each window. The feature parameters were learned on validation sets by maximizing localization accuracy and posterior probability. Then, all the features were combined in a Naive Bayesian framework and a classifier was trained. In the target detection step, the multi-scale saliency score was firstly computed within all the windows of test images, and partial windows with higher saliency and proper sizes matching to the objects to be detected were selected preliminarily. Furthermore, other scores were computed within the selected windows, and the posterior probability of each window was computed by using the trained classifier. Finally, windows with high local scores were selected and merged and the final detection results were obtained. The detection experiments were performed on three types of remote targets including planes, oilcans and ships, and the results show that each type of feature appears different properties for targets described, the highest accuracy is 74.21% to 80.32%. The proposed method outperforms all the single feature methods and the accuracy is improved to 80.87% to 87.30%. By compared with the fixed number sliding window algorithm, the accuracy rate is improved from about 80% to 85% and the false alarm rate is reduced from about 20% to 3%. Furthermore, the proposed method shows a 90% reduction in the number of windows and 25% reduction in the detection time due to the selection in the intermediary stage. It concludes that the method improves detection accuracy and algorithm efficiency greatly.
optical remote sensing; object detection; fused feature contrast; subwindow; saliency; affine invariant; edge density
2016-03-21;
2016-07-03.
国家自然科学基金资助项目(No. 41301480,No. 41301382);陕西省自然科学基础研究计划资助项目(No. 2014JQ5181);陕西省教育厅专项科研计划资助项目(No.14JK1573)
1004-924X(2016)08-2067-11
TP751
A
10.3788/OPE.20162408.2067
