大气相干长度的瞬时测量
2016-10-10卫沛锋林旭东王鸣浩
卫沛锋,林旭东,王 亮,王鸣浩
(1.中国科学院 长春光学精密机械与物理研究所,吉林 长春130033; 2.中国科学院大学,北京 100049)
大气相干长度的瞬时测量
卫沛锋1,2*,林旭东1,王亮1,王鸣浩1
(1.中国科学院 长春光学精密机械与物理研究所,吉林 长春130033; 2.中国科学院大学,北京 100049)
由于差分像运动监测法测量大气相干长度需要多帧统计,本文应用波前结构函数法,提出了一种大气相干长度的瞬时测量方法。该方法通过Shack-Hartmann波前探测器测量单帧短曝光畸变波前的Zernike系数;然后减去光学系统初始像差的Zernike系数,去除倾斜项,计算波前结构函数;最后,与满足Kolmogorov湍流理论的大气短曝光理论波前结构函数进行最小二乘拟合,得到瞬时大气相干长度。利用湍流相位板构造了相应的测试系统,并进行了外场实测对比。结果表明:提出的基于波前结构函数法的测量结果与差分像运动监测法的测量结果基本吻合;不同格林伍德频率下,标准差与均值之比小于4.1%,稳定性较好;外场比对累计16个夜晚,得到的平均偏差小于0.45 cm。该方法可以实现空间目标大气相干长度的单帧瞬时测量,并可用于观测站点的视宁度、自适应光学系统内部大气湍流强度和地基大口径望远镜主镜视宁度的监测。
自适应光学;大气相干长度;空间目标;瞬时测量;波前结构函数法
*Correspondingauthor,E-mail:weipeifeng@gmail.com
1 引 言
为获取天文目标和空间目标的清晰图像,地基望远镜口径越来越大,但其分辨率却受限于大气相干长度。为克服大气对望远镜分辨能力的限制,自适应光学系统已经成为地基大口径望远镜必不可少的技术单元[1-2]。
天文学家一般用大气相干长度r0或者视宁度来表征大气在空域上对望远镜分辨率的限制。大气相干长度定义为位相起伏的均方值为1 rad的圆域或子孔径的大小,国际上一般用差分像运动监测法(Differential Image Motion Monitor,DIMM)来测量r0[3]。该方法的实质是依据湍流冻结假设用差分到达角的时域起伏方差来获取大气畸变波前的空域统计特征量r0。DIMM的测量结果与目标仰角相关,且一般需要一分钟或数百帧的数据来获取一个有效数据,观测目标多为静止不动或运动很慢的恒星或行星目标,所以不适用于监测仰角变化快、观测时间短的空间目标。空间目标的大气相干长度如何变化,是否遵循理论上与目标观测仰角正割的6/5方成正比,以及量级都有待进一步地明确。
1975年,Fried推导了差分到达角起伏的方差公式[4],该公式成为差分像运动监测法的基本原理。1990年,M.Sarazin通过40 s200 frame的连续曝光来监测大气相干长度[5-6]。2000年,饶瑞中采用三星点像运动法[7]来测量大气相干长度,并于2007年提出了改进的四孔差分星点像运动法[8]。2010年,他们采用该方法对Dome效应进行了监测,计算样本数为200 frame,测量时间为3 s[9]。2013年,陈浩[10]通过将一对星点像增加为Shack-Hartmann波前探测器上呈正方形分布的十二对星点像来增加空间统计特征,计算样本数为300 frame。上述方法的改进思路类似,都是通过增加空间统计特性来提高测量结果的稳定性。2014年,黄德权[11]提出通过波前分布的时域剩余方差来计算大气相干长度,同样需要一定的观测时间和帧数。因此,上述方法均不适用于测量角度变化快、观测时间短的空间目标的大气相干长度。
本文利用Shack-Hartmann波前探测器测量的单帧短曝光畸变波前的Zernike系数,计算大气波前结构函数,通过与理论结果对比来获取瞬时大气相干长度。并利用可控制、可重复的湍流相位板构造了相应的自适应光学测试系统,对该算法进行验证。同时,还进行了累计16个有效观测夜晚的实测比对。
2 波前结构函数法测量瞬时大气相干长度的原理
对于多数观测时间只有1~2分钟、且仰角快速变化的空间目标来讲,如果能直接提取空域统计信息,就可实现r0的瞬时测量。而波前结构函数是波前在光瞳面上的空域一维二阶统计量,这里设法从波前结构函数提取r0。
结构函数定义为不同空间间隔下成对点之间的波前相位差的平方的统计均值,即有:
Dφ(r)=〈[φ(x+r)-φ(x)]2〉x,
(1)
式中:r为成对点之间的空间间隔,φ为相应位置的波前相位,x表示光瞳面上的空间位置,三角括号表示所有x处的统计平均。
Shack-Hartmann是目前自适应光学系统最常用的波前探测器。通过波前解析可以得到短曝光单帧畸变波前的Zernike系数,从而可得到对应的波前结构函数的测量值。另外,短曝光条件下,满足Kolmogorov湍流模型的理论大气畸变波前的结构函数为[12]:

(2)
式中:d为望远镜主镜口径,2σ2代表大气散射损失,这里忽略不计。对不同大气相干长度对应的波前结构函数的理论值和测量值进行最小二乘拟合,便可求解得到瞬时的大气相干长度,此时测得的是对应目标观测仰角处的大气相干长度。而望远镜观测站点的整层大气相干长度须归一化到天顶角处来进行监测,所以须对式(2)进行修正:

(3)
式中:ζ为天顶角,r0′ 为式(2)的测量结果。
瞬时大气相干长度的计算流程如下:(1)获取Shack-Hartmann测量的短曝光(曝光时间须小于大气相干时间)单帧畸变波前的Zernike系数;(2)减去光学系统初始像差的Zernike系数;(3)计算测量波前去除倾斜项后对应的结构函数;(4)按式(2)计算对应r0从0.01~10 m间隔为0.001 m对应的理论波前结构函数;(5)对比结构函数的理论值与测量值,求大气相干长度的最小二乘估计;(6)如果需要监测天顶角处的r0,按式(3)进行修正。
3 实 验
为验证上述算法,采用湍流相位板模拟大气湍流构造了一套自适应光学测试系统,光路如图1所示。25 μm直径的白光光纤光源Source发出的光经过湍流相位板形成随机波前。随机波前经平面镜1转折光路后再经透镜L1变为平行光入射到快速反射镜(Fast Steering Mirror,FSM)上,然后反射到变形镜(Deformable Mirror,DM)上,经透镜L2会聚和分色片透射后在CCD上成像。分色片反射的光经透镜L3准直后入射到Shack-Hartmann波前探测器中。

图1 自适应光学测试系统光路图Fig.1 Scheme of adaptive optics testing system
实验光路中,FSM、DM和波前探测器均为自研,DM为97单元压电变形镜。Shack-Hartmann的曝光时间为1.98 ms,有效点数为97。湍流相位板为从Lexitek公司定制的相干长度为0.6 mm(@633 nm)的随机相位板,相位分布满足Kolmogrov湍流理论。通过改变湍流相位板的通光尺寸来模拟r0的变化。其原理如下[13]:

(3)
式中:D为模拟的望远镜口径;r0′为湍流相位板的相干长度;D′为湍流相位板上的通光孔径尺寸。通过调节湍流相位板的转速来模拟格林伍德频率fG的变化,fG与湍流相位板转速的关系为:
(4)
式中v为通光孔径中心处的线速度。
4 讨 论
Shack-Hartmann波前探测器受0.6 mm湍流相位板影响的点列图如图2所示。由图2可看出,湍流相位屏的加入使得原先亮度均匀、排列整齐、大小相同的点变得明暗不均、排列错位、大小不一。

(a) 无湍流相位板 (b)0.6 mm湍流相位板(a) Without phase plate (b) With 0.6 mm phase plate图2 Shack-Hartmann波前探测器点列图Fig.2 Spot arrays of Shack-Hartmann wavefront sensor
大气的格林伍德频率fG约为50~90 Hz,内陆地区的r0一般小于10 cm,因此,调整湍流相位板转速使得模拟的fG为60 Hz,调整通光孔径r0为9 cm。采用本文所述方法计算模拟的湍流波前。首先,使Shack-Hartmann曝光时间小于大气相干时间(一般约为10 ms),这里为1.98 ms,得到畸变波前的Zernike系数;通过设置参考或直接减去光学系统初始像差,得到大气畸变波前的Zernike系数;预先计算得到不同项单位Zernike系数的结构函数,然后与大气畸变波前Zernike系数相乘后累加,计算去除倾斜项后对应的结构函数;按式(2)计算对应的理论波前结构函数;最后,通过对比波前结构函数的理论值与测量值,求得大气相干长度的最小二乘估计。实验中,光束相当于直接从天顶角处入射,计算结果无须进行角度修正,但实际外场测量时则必需进行角度修正。8 625帧的湍流波前的测量结果如图3所示。由于r0与波长相关,故后续计算结果统一归一化到633 nm,以便于比较。r0测量均值为9.6 cm,标准差为3.6 cm,波动较大。图4为Shack-Hartmann测量的波前均方差(Root Mean of Square,RMS),RMS均值为0.454 6λ(λ=633 nm),标准差为0.1λ,同样波动较大。对比图3和图4说明:瞬时r0的测量结果同波前均方差RMS波动的周期性、幅度均类似,能较好地反映波前的瞬时变化特征,这也正是波前结构函数法测量r0的优势。

图3 fG=60 Hz,r0=9 cm时波前结构函数法的测量结果Fig.3 Result of wavefront structure function when fG=60 Hz and r0=9 cm

图4 fG=60 Hz,r0=9 cm时波前均方差RMS的变化Fig.4 Variation of RMS of wavefront when fG=60 Hz and r0=9 cm
测量均值r0=9.6 cm与设计值r0=9 cm的波前结构函数的对比如图5所示。从图5可看出,测量均值与设计值的波前结构函数能够较好地吻合;但是在大的空间间隔,即低频处的偏差稍大。其原因有两方面:一方面是大气湍流理论模型引起的偏差。式(2)的理论前提是大气湍流满足Kolmogorov湍流模型,但实际的大气湍流并不完全遵从该理论[14];另一方面,计算结构函数时低频处的统计样本数小于高频处会引起部分统计偏差。

图5 波前结构函数的测量值和理论值对比Fig.5 Comparison between theoretical values and experimental values of wavefront structure function
为验证波前结构函数法测量瞬时r0的准确性和稳定性,同时模拟了r0=11,9,5 cm,fG=10~100 Hz,间隔10 Hz时的波前结构函数法和DIMM法测量r0的结果比较。为增加DIMM测量结果的稳定性,选取图2所示的Shack-Hartmann点列图中第4~8行,第3列、第11列共5对点的统计平均值作为DIMM方法的测量结果。两种方法的测量结果对比如图6所示,图中实线为设计值,点划线为拟合曲线。由图6可看出,波前结构函数法的测量结果同DIMM法测量结果呈良好的线性关系,并且随着模拟r0的变化,能同步反映波前的变化;但两种方法的测量值存在一定的偏差,这是由于DIMM方法固有的空间采样不足的缺陷,或者理论波前结构函数模型描述误差引起的;两种方法的测量值都同设计值存在一定的偏差,这可能是实验过程中通光孔径尺寸的设置偏差所引起的。从图6还可看出,在模拟大气湍流r0一定的情况下,当fG从10 Hz变化到100 Hz时,波前结构函数法测量的瞬时r0的标准差与均值之比的最大值小于4.1%,说明测量稳定性良好。
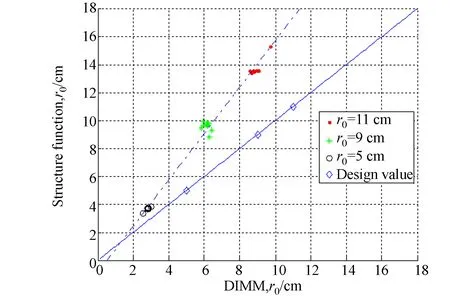
图6 波前结构函数法和DIMM法测量r0的结果比较Fig.6 Comparison of r0 measured by wavefront structure function and DIMM
2011年10-11月累计16个有效观测夜晚,在长春光机所自研的1.23 m自适应望远镜上分别使用波前结构函数法和DIMM法测量大气相干长度,其结果对比如图7所示。其中,曝光时间均为1.98 ms;累计8 000帧的平均值作为对比;DIMM法的单个r0的计算样本数为200帧。图7可看出,两种方法测量结果的偏差均值为0.45 cm,标准差为1 cm,说明两种测量方法的结果在数值和偏差上相当; 同时,随时间变化,两种测量结果在趋势上趋于一致,这说明在监测整层大气的r0上,波前结构函数法同DIMM法的精度相当。
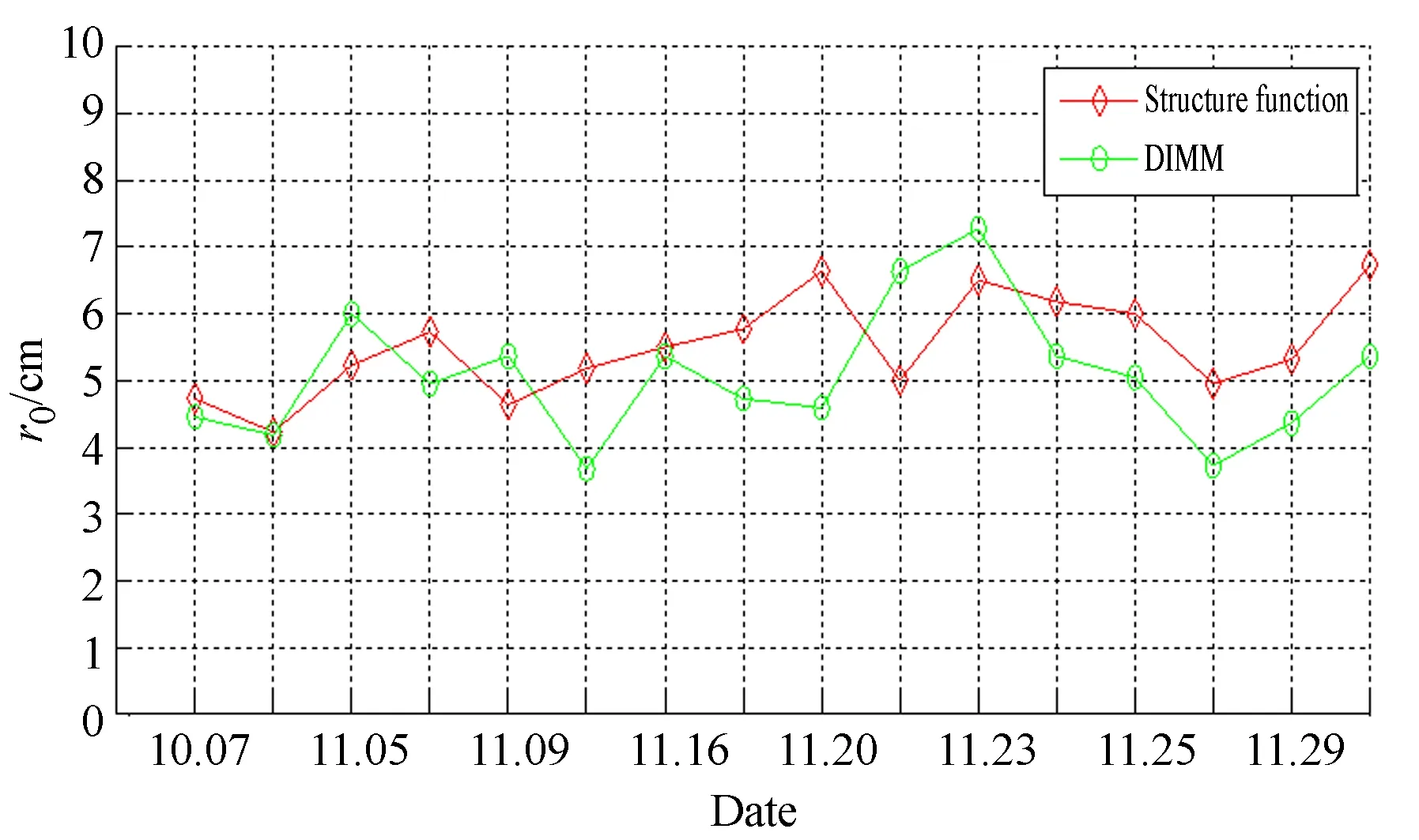
图7 波前结构函数法和DIMM外场测量r0的结果对比Fig.7 Comparison of r0 measured by wavefront structure function and DIMM in field
5 结 论
本文基于应用波前结构函数法,提出了一种瞬时测量大气相干长度的方法。实验结果表明:波前结构函数法的测量精度同传统的DIMM方法相当,实测偏差小于0.43 cm(16个有效观测夜晚)。波前结构函数法能够评价空间目标受大气影响的r0尺度大小,突破了DIMM方法只能测量恒星或行星的限制。此外,单帧短曝光测量可避免震动对测量结果的影响。波前结构函数法避免类似DIMM方法空间采样不足对测量结果的影响,拓展了视宁监测设备的适用范围,可用于地基大口径望远镜主镜视宁度和自适应光学系统内部湍流的监测。
[1]贾建禄,王建立,赵金宇,等.自适应光学系统波前处理算法的优化[J].光学 精密工程,2013,21(4):1026-1031.
JIA J L, WANG J L, ZHAO J Y,etal.. Optimization of adaptive optical wave-front algorithm[J].Opt.PrecisionEng., 2013, 21(4):1026-1031.(in Chinese)
[2]林旭东,刘欣悦,王建立,等. 137单元变形镜的性能测试及校正能力实验[J].光学 精密工程,2013,21(2):267-273.
LIN X D, LIU X Y, WANG J L,etal.. Performance test and experiment of correction capability of 137-element deformable mirror[J].Opt.PrecisionEng., 2013,21(2):267-273.(in Chinese)
[3]于龙昆,吴毅,侯再红,等.利用差分像运动监测仪法测大气相干长度的研究[J].光学学报,2013,33(12):1201004-1-5.
YU L K, WU Y, HOU Z H,etal.. Study on the measurement of coherence length by differential image motion monitor[J].ActaOpticaSinica, 2013, 33(12):1201004-1-5.(in Chinese)
[4]DAVID L F. Differential angel of arrival: Theory, evaluation, and measurement feasibility[J].RadioScience, 1975, 10(1):71-76.
[5]MARC S, RODDIER F. The ESO differential image motion monitor[J].Astron.Astrophys, 1990,227:294-300.
[6]MARC S. ESO-VLT instrumentation for site evaluation in Northern Chile[J].SPIE,1986,628:138-141.
[7]饶瑞中,王世鹏,刘晓春,等. 湍流大气中的激光束漂移的实验研究[J]. 中国激光,2000,27(11):1011-1015.
RAO R ZH, WANG SH P, LIU X CH,etal.. Experimental study of spot dancing of laser beam in turbulent atmosphere[J].ChineseJournalofLasers, 2000,27(11):1011-1015.(in Chinese)
[8]黄宏华,姚永帮,饶瑞中.四孔差分像运动测量大气相干长度的方法研究[J].强激光与粒子束,2007,19(3):357-360.
HUANG H H,YAO Y B, RAO R ZH. Measurement of atmospheric coherent length by four-aperture differential image motion method[J].HighPowerLaserandParticleBeams, 2007,19(3):357-360.(in Chinese)
[9]倪志波,黄宏华,黄印博,等. Dome效应对四孔大气相干长度仪系统性能的影响[J]. 强激光与粒子束,2010,22(11):2551-2555.
NI ZH B, HUANG H H, HUANG Y B,etal.. Influence of Dome effect on system performance of four-aperture coherent length monitors[J].HighPowerLaserandParticleBeams, 2010,22(11):2551-2555.(in Chinese)
[10]陈浩,宣丽,胡立发,等. 大气相干长度的稳定测量[J]. 光学 精密工程, 2013,21(4):911-918.
CHEN H, XUAN L, HU L F,etal..Steady measurement of atmospheric coherence length[J].Opt.PrecisionEng.,2013,21(4):911-918.(in Chinese)
[11]黄德权,周文超,邱红,等. 哈特曼测量大气相干长度研究[J]. 强激光与粒子束,2014,26(8):081003-1-6.
HUANG D Q, ZHOU W CH, QIU H,etal.. Research on measurement of atmospheric coherence length using Shack-Hartmann wavefront sensor [J].HighPowerLaserandParticleBeams, 2014,26(8):081003-1-6.(in Chinese)
[12]耿则勋,陈波,王振国,等. 自适应光学图像复原理论与方法[M].北京:科学出版社,2010.
GENG Z X, CHEN B, WANG ZH G,etal..PerformanceAnalysisofAdaptiveOpticalSystemforSpatialObjectives[M]. Beijing: Science Press, 2010. (in Chinese)
[13]卫沛锋,卢振武,刘欣悦,等. 自适应光学系统对空间运动目标校正性能分析[J]. 光子学报, 2015,44(7):0701001-1-7.
WEI P F, LU ZH W, LIU X Y,etal.. Performance analysis of adaptive optical system for spatial objectives[J].ActaPhotonicaSinica, 2015,44(7):0701001-1-7.(in Chinese)
[14]饶长辉. 非Kolmogorov湍流情况下低阶校正自适应光学系统的性能研究[D]. 北京:中国科学院, 2000.
RAO CH H.PerformanceAnalysisofLow-orderCorrectionAdaptiveOpticalSystemforNon-KolmogorovTurbulence[D]. Beijing:Graduate University of the Chinese Academy of Sciences,2000.(in Chinese)

卫沛锋(1984-),男,山西运城人,博士研究生,助理研究员,2006年、2009年于西北工业大学分别获得学士、硕士学位,主要从事自适应光学、大气光学的研究。E-mail:weipeifeng@gmail.com

林旭东(1982-),男,福建莆田人,博士,副研究员,2005于长春理工大学获得学士学位,2010年于中科院长春光机所获得博士学位,主要从事自适应波前校正技术方面的研究。E-mail:linxudong_82@126.com
(版权所有未经许可不得转载)
Simultaneous measurement of atmospheric coherence length
WEI Pei-feng1,2*, LIN Xu-dong1, WANG Liang1,WANG Ming-hao1
(1.ChangchunInstituteofOptics,FineMechanicsandPhysics,ChineseAcademyofSciences,Changchun130033,China; 2.UniversityofChineseAcademyofSciences,Beijing100049,China)
When the differential image motion monitor method is used to measure the atmospheric coherence length, it needs a number of frames recorded with objective motions. Therefore, this paper proposes a simultaneous measuring method of the atmospheric coherence length based on the wavefront structure function for spatial objective. The method uses a Shack-Hartmann wavefront sensor to measure the Zernike coefficients of a frame of aberrated wavefront with short exposure. Then, it subtracts the initial aberration of optical system, removes the tip and tilt items and calculates the experimental structure function of aberrated wavefront. Finally, the simultaneous atmospheric coherence length is obtained by least-square approximation fitting with the theoretical structure function of aberrated wavefront satisfying the Kolmogorov turbulence theory. A test system is constructed by a turbulence phase plate and a number of experiments are conducted in an external field. The result shows that the measured atmospheric coherence length by using the proposed method based on the wavefront structure function matches well with that of the differential image motion monitor method. The ratio of mean value to standard deviation is less than 4.1% under different Greenwood frequencies and the mean difference of two methods is less than 0.45 cm in 16 effective nights. The method implements the simultaneous measurement of atmospheric coherence lengths of spatial objectives and also could be used to evaluate the seeing of observation sites, the atmospheric turbulence strength inside adaptive system and the mirror seeing of main mirror for a ground-based large aperture telescope.
adaptive optics; atmospheric coherence length; spatial objective; simultaneous measurement; wavefront structure function method
2015-11-13;
2016-01-07.
国家863高技术研究发展计划资助项目(No. 2015AAXXX1003X)
1004-924X(2016)08-1840-06
P412.1
A
10.3788/OPE.20162408.1840
