利用近景摄影测量技术监测红旗沟排土场边坡位移变形
2016-09-26毛斌斌
毛斌斌 张 强 徐 豪 葛 涛
(武汉理工大学资源与环境工程学院)
利用近景摄影测量技术监测红旗沟排土场边坡位移变形
毛斌斌张强徐豪葛涛
(武汉理工大学资源与环境工程学院)
介绍了基于近景摄影测量技术进行露天矿山边坡位移变形监测的基本方法,详细分析了近景摄影测量技术在边坡位移变形监测中的应用流程。以金堆城钼矿红旗沟排土场边坡为例,讨论了利用近景摄影测量技术获取点云数据、边坡变形量的流程和方法,测量误差分析表明,近景摄影测量技术可对边坡进行高精度监测,为矿山边坡维护治理提供数据支持。
近景摄影测量变形监测点云边坡治理
金堆城钼矿位于我国陕西省渭南市华县金堆镇,年产钼金属量约1.2万t,处于中国钼行业之首,亚洲第一,世界第二。金堆城钼矿床采用露天分期开采方式,矿山服务年限达100多a。当前开采深度已达100多m,仍需继续下采200多m,从而形成300多m深的深凹边坡,最终开采深度可能形成500m以上国内少见的超深凹边坡。该矿山的红旗沟排土场经过30多a的运行,堆土高度达到了125m[1]。由于坡宽面长,长期受雨水冲刷,造成了坡体不稳定。在遭遇暴雨时,极易形成泥石流,严重威胁了下游人民的生命财产安全。因此,有必要建立全面的边坡稳定测量系统,实现快速、高效、实时监测边坡表面位移,分析评价边坡的稳定状态,进而找出危险范围,以便及时采取防护措施[2]。金堆城钼矿传统的位移变形监测方法都为“点”测量方法,无法得到其他部位的位移信息,更无法获取整个地质体的空间位移模式。近景摄影测量作为一种基于“面”测量的非接触监测技术,能够快速、经济地提供整个监测体的空间三维信息[3]。并且近景摄影测量无需在监测边坡体范围内布置任何观测点和仪器便可对边坡岩体的表面位移进行监测,保证了测量过程的安全,减少了工作量。本研究在考查金堆城钼矿边坡现状的基础上,对近景摄影测量边坡监测技术的流程进行分析,并将其应用于金堆城钼矿红旗沟排土场边坡位移变形监测,论证该方法在矿山边坡变形监测中的可行性。
1 边坡变形监测数据处理流程
数字近景摄影测量系统改变了传统近景碎部测量的作业模式,基于计算机视觉和数字近景摄影测量原理,利用成像传感器摄取研究对象的影像,通过对影像的处理、解译和分析,获取对象的形状、尺寸、空间位置及与其他对象的空间关系等几何属性信息和研究对象的纹理等物理属性信息,实现了全自动数字近景摄影测量,极大提高了生产效率[4-5]。在红旗沟排土场边坡变形监测过程中,摄影之前,首先在重点监护区设置标志点,使用非量测相机(普通数码单反相机,像素要求在1 200万以上)进行外业近景摄影测量,获取监测区影像;然后采用全站仪测量控制点的绝对坐标;最后使用Lensphoto多基线数字近景摄影测量系统对影像进行前处理、空三匹配、空三测量及区域网光束法平差、加密匹配、立体编辑,DEM、点云及等高线的生成,并对变形前后的DEM进行对比,得出相应时间区段的变形量。基于近景摄影测量技术的边坡变形监测数据处理流程见图1。
2 外业影像数据采集
2.1控制点布设
在监测区域布设少量控制点,建立摄影像片与目标物间的已知数学关系。控制点标识牌尺寸为 1m×1m,用黑色油漆刷制而成(图2)。控制点的布设原则:①控制点宜均匀分布于摄影区内,点位不宜布设于近似1条直线上或近似1个平面上;②控制点尽可能布设于拍摄物体(测量对象)四周,便于进行空中三角测量;③控制点数目7~10,点数越多,易增加测量成本,太少则影响测量精度[6]。经实地考查,在红旗沟排土场共布设了8个控制点,控制点分为3排,上排3个,中排2个,下排3个,依次编号为1#~8#(图3)。

图1 边坡变形监测数据处理流程
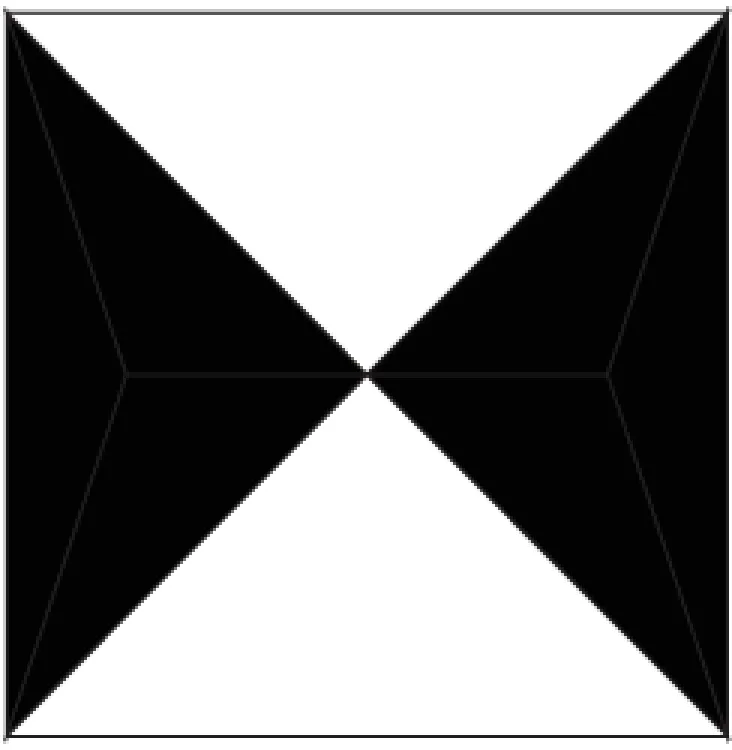
图2 标识牌样式

图3 控制点布设
2.2影像拍摄
近景摄影测量的摄影方法有平行摄影法和旋转多基线交向摄影法2种。平行摄影法是指相机平行于被摄物连续进行拍摄,一次拍摄过程中相机的移动距离较大。旋转多基线交向摄影法是将拍摄物体分为多个条带,确定摄站后,在各摄站旋转相机,对准每一条带中心进行连续摄影。由于本研究拍摄影像时相机距拍摄物体较远(达670多m),因而选用旋转多基线交向摄影方法(图4)。采用旋转多基线交向摄影方法时,首先根据被摄物体的宽度和相机的地面覆盖范围,将被摄物体按水平方向划分为若干条带,要求条带间的重叠度大于60%;然后根据摄影距离确定摄影基线的长度和摄站个数;最后在各摄站上手持相机,通过旋转摄影的方式,对准每一条带中心进行连续摄影。在金堆城钼矿红旗沟排土场边坡监测过程中,共进行了2次影像拍摄,时间分别为2014年5月15日、2014年10月23日,通过前后2次监测结果的比较,得出边坡的变形情况。现场拍摄时使用佳能3580相机,1 280万像素,镜头焦距200mm。在排土场设置了3个摄站,每个摄站拍摄4张影像,共12张影像。
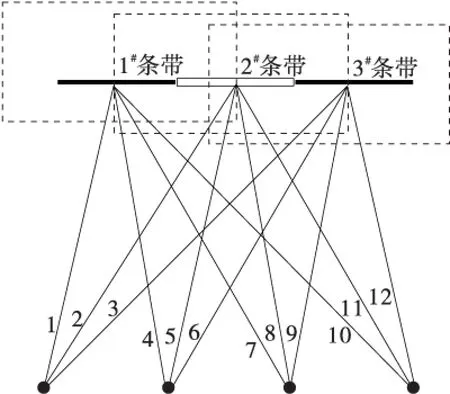
图4 旋转多基线交向摄影示意
2.3控制点坐标测量
现场影像拍摄完毕后,需测量控制点的绝对坐标,作为进行摄影测量的初始数据。本研究采用SOKKIA全站仪测量各控制点的绝对坐标。
3 内业影像数据处理
3.1空三匹配处理
外业影像拍摄完毕后,需检验影像拍摄是否符合规范,须实现空三匹配成功平差,后续的内业影像数据处理方可顺利进行。空三匹配用于自动寻找不同影像上的同名点,匹配前需人工给定航带内立体像对的种子点和航带间相应影像的种子点。空三匹配是影像数据处理的基础,空三匹配的效果越好,则后续的平差和解算精度越高,边坡位移变形监测的结果也越精确。图5为航带间的匹配效果图,影像A、影像B是同一测站拍摄的分属于不同航带的2张影像。图5中的白色区域是程序在两航带间找到的同名点,本研究匹配的白色区域范围广,遍及整个坡面,表明匹配效果好,航带间影像的重叠度满足要求。
3.2点云生成
Lensphoto多基线数字近景摄影测量系统软件可自动生成密集点云,利用粗差检测算法,可有效删除匹配后出现的错点、无效点。进入点云编辑模块对点云进行人工编辑,添加特征点线,删除部分冗余点和错点。点云生成后可利用三维空间点云建立边坡的立体模型。本研究点云生成效果见图6,点云分为3个部分,由上至下依次编号为①、②、③,对应的边坡图片也进行类似编号。图6(a)中白色直线为摄影基线,标有X、Y的线条为系统坐标系,点云中间最为密集,上下较稀疏,对应所拍摄排土场的3块边坡,能够看出边坡轮廓,说明点云生成效果较好。
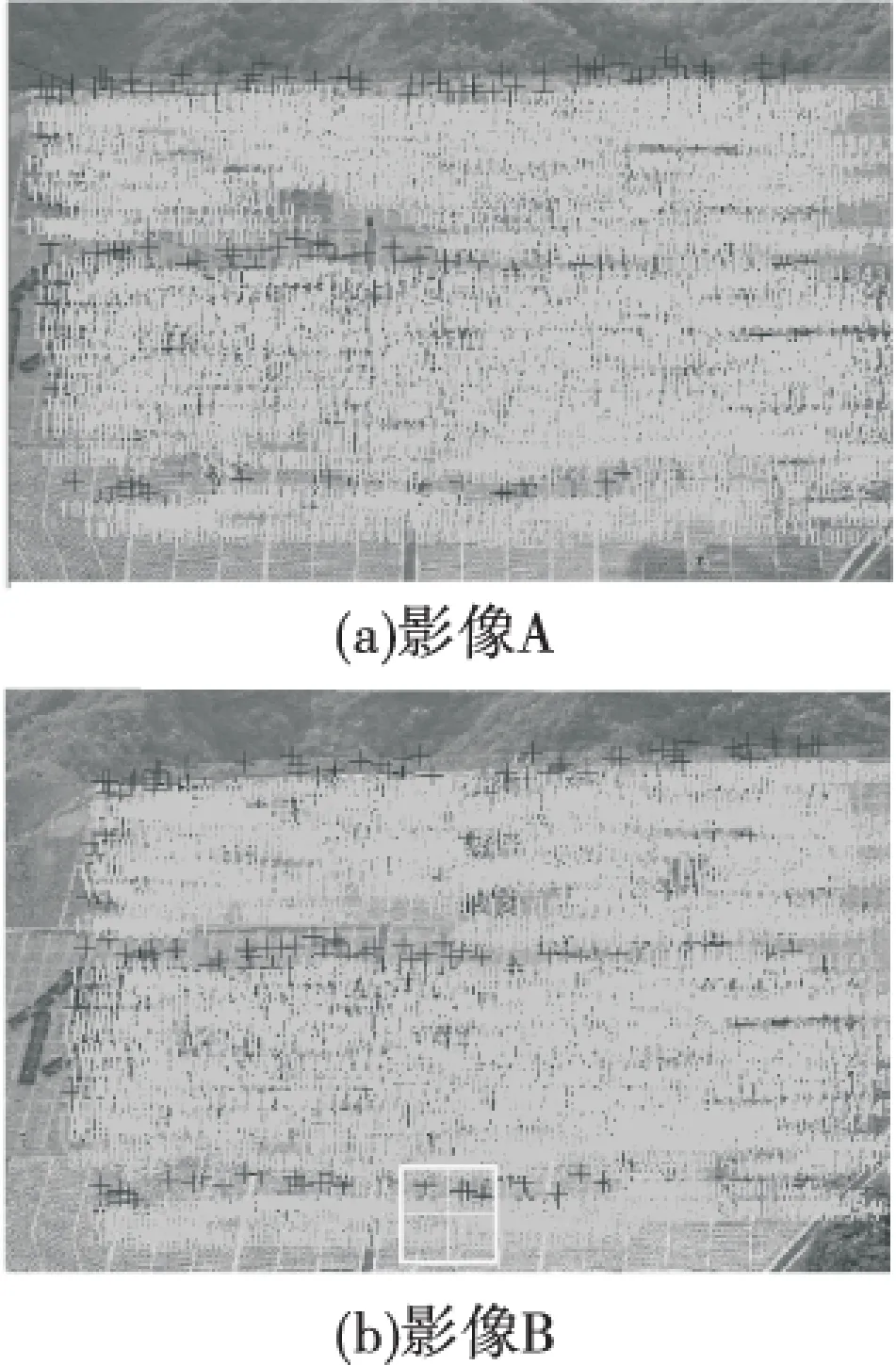
图5 空三匹配处理结果
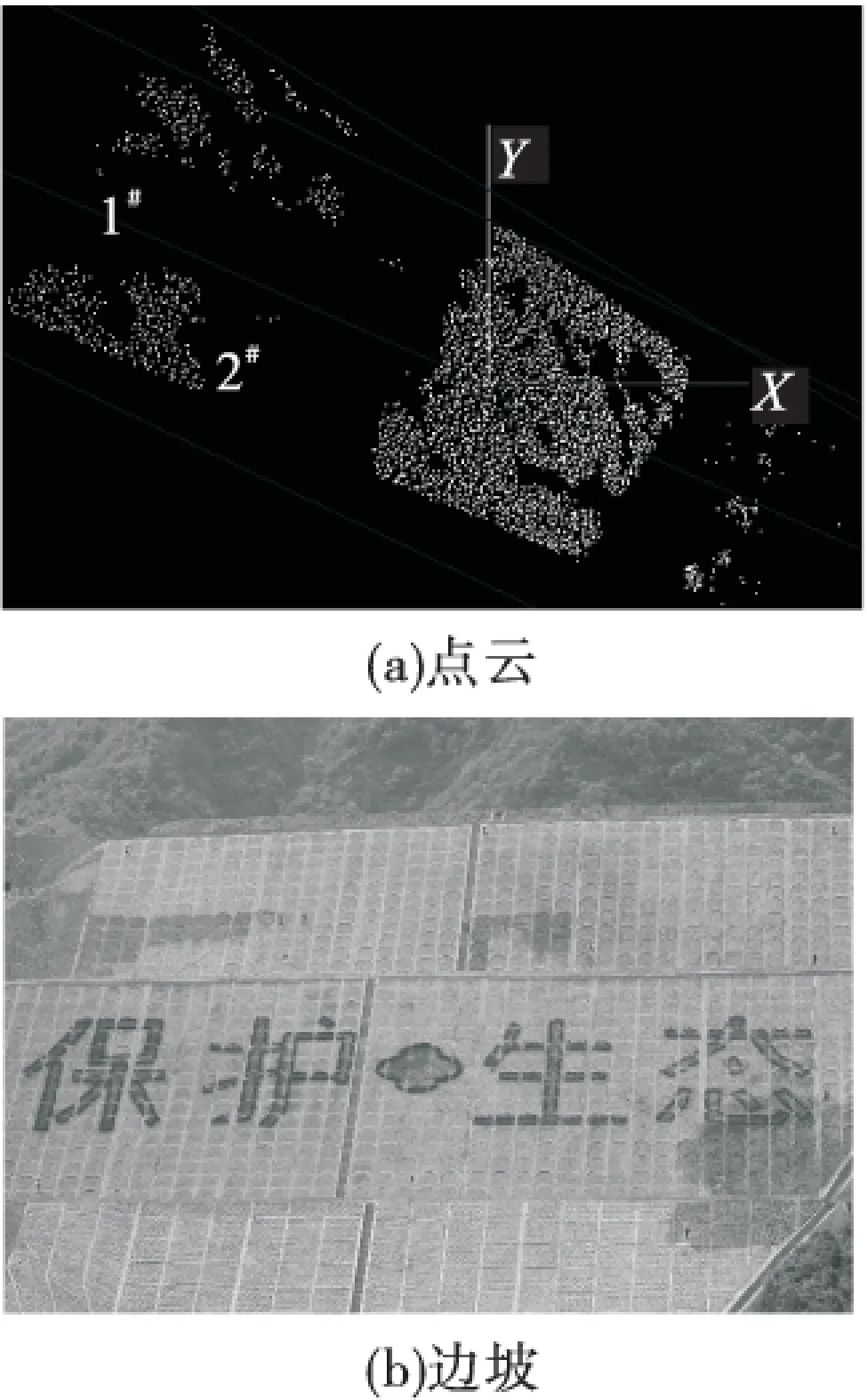
图6 点云及边坡照片
3.3边坡变形量及精度评价
将点云数据调入数据处理系统后可自动生成测量目标的DEM。将前后2次生成的DEM相减,可得到不同时期监测边坡的体积变化和最大变形量。比较2014年5月15日、2014年10月23日所拍摄影像生成的DEM,可得到该段时间边坡所产生的最大变形量。由DEM比较结果可知,2次拍摄期间红旗沟排土场的最大变形量为4.3mm。在影像处理完毕后,通过增加同名点的方式,量测选定标识牌十字丝交叉处的坐标,检查监测效果和数据处理误差。本研究之所以选取了5#点进行误差分析,是因为:①5#点位于监测区域中部,属于变形较大的区域,是重点监测区域;②5#点是两航带拼接处,数据处理误差较大。2014年5月15日、2014年10月24日的2次监测中,5#点坐标通过全站仪测量和近景摄影测量得到的结果及两者的差值见表1。由表1可知:近景摄影测量结果与全站仪测量结果误差较小,可见近景摄影测量技术具有较高的精度。
4 结 语
分析了传统边坡监测方法的缺陷,阐述了近景摄影测量技术在边坡位移变形监测中的应用流程,并对近景摄影测量技术的边坡监测精度进行了评价,结果表明,近景摄影测量技术具有较高的精度,测量工作量较小,具有非接触式拍摄影像的特点,作业安全,可操作性强。利用近景摄影测量数据分析评价边坡危险状况,开发相应的边坡稳定性计算软件,是需要进一步研究的方向。
表1不同时期5#点坐标值

m
[1]席字鹏,王江文.金堆城露天矿红旗沟排土场的综合治理[J].现代矿业,2009(10):131-138.
[2]孙玉科,姚国魁,许兵.矿山边坡稳定性研究的回顾与展望[J].工程地质学报,1998(4):305-311.
[3]ArakiK.Ahigh-speedandcontinuous3Dmeasurementsystem[J].MachineVisionandApplications,1995(2):79-84.
[4]丁进选,王斌.多基线数字近景摄影测量在建筑立面提取中的应用[J].测绘通报,2012(6):47-50.
[5]柯涛,张祖勋.旋转多基线数字近景摄影测量[J].武汉大学学报:信息科学版,2009,34(1):44-51.
[6]龚涛.近景摄影测量控制点布设方案的研究[J].西南交通大学学报,1997,32(3):330-335.
2015-10-26)
毛斌斌(1993—),男,硕士研究生,430070 湖北省武汉市。