基于免疫遗传模糊神经滑模的地面作战机器人轨迹跟踪控制
2016-09-20李郁峰李魁武潘玉田郭保全
李郁峰,李魁武,潘玉田,郭保全
(1.中北大学 计算机与控制工程学院,山西 太原 030051;2.西北机电工程研究所,陕西 咸阳 712099)
基于免疫遗传模糊神经滑模的地面作战机器人轨迹跟踪控制
李郁峰1,李魁武2,潘玉田1,郭保全1
(1.中北大学 计算机与控制工程学院,山西 太原030051;2.西北机电工程研究所,陕西 咸阳712099)
提出了一种基于运动学与动力学模型的免疫遗传模糊神经滑模混合控制器用于地面作战机器人的控制。算法中利用径向基神经网络逼近滑模控制的等效部分,并通过免疫遗传算法对径向基神经网络参数进行了优化,滑模控制的增益通过模糊控制策略进行了调节。利用该算法对圆形轨迹进行了跟踪控制仿真及试验分析,与传统的滑模控制相比,该算法能够有效克服系统的不确定性因素的影响,有效抑制了滑模控制中抖振现象,系统的动态轨迹跟踪性能得到了优化。
滑模控制;神经网络;免疫遗传;模糊控制;轨迹跟踪控制
针对移动机器人的轨迹跟踪控制问题,主要集中在运动学模型,由于不确定性因素的存在,机器人运动参数时刻发生变化,导致速度跟踪无法得到实现。于是引入了机器人的动力学模型,利用智能优化算法设计混合控制器,解决非完整移动机器人系统的不确定性问题[1-3]。
1 地面作战机器人动力学模型
具有n维状态的非完整约束移动机器人Lagrange广义动力学系统模型可表示为[4]
(1)
该机器人系统中n=3,l=1,速度控制输入向量uc=[vc,ωc]T,ωc、vc分别为机器人质心的角速度与线速度。
选择一个满秩矩阵S(q)=[S1(q),…,Sn-1(q)]作为A(q)零空间的一组基:A(q)S(q)=0。于是存在n-l维速度向量u(t)=[V1,V2,…,Vn-1]T可作为新的速度控制输入,并且对于时间t,使

(2)
根据地面作战机器人的结构,由Lagrange公式得到该动力学模型可用下述矩阵形式表示:


(3)

在系统模型不确定因素的影响下,其动力学方程式可表示为
(4)
式中:ΔM′和ΔV′m分别为系统惯性矩阵和哥氏矩阵的模型误差;E0为系统矩阵:
(5)
式(4)取代式(1)成为机器人动力学模型的方程表达式。
2 免疫遗传模糊神经滑模混合轨迹跟踪控制
根据滑模控制原理,选择滑模面为
(6)
式中:ec=uc-u;λ>0。

(7)
设B=E0τ作为新的控制变量,为了使状态轨迹保持在滑模面上,则
(8)
(9)

(10)
由于作战机器人系统具有参数不确定性及扰动性,式(10)无法保障系统性能和稳定性,于是采用径向基神经网络(radial basisfunction neural network, RBFNN)[5]来计算等效控制。设计轨迹跟踪误差作为RBFNN的2个输入,N个隐层单元,2个输出的RBFNN网络结构[6-7]。取xi=ec(i),i=1,2,于是RBFNN的输出为
假设神经网络逼近的最优值为
为了克服系统的不确定性,神经网络权值通过免疫遗传算法在线调节[8],于是实际等效控制为
(12)

用免疫遗传算法进行在线调整网络各隐层单元“中心”和“宽度”,并用最小二乘法对RBFNN输出权值进行辨识。

为了消除神经网络的初始学习误差,提高系统的瞬态响应,在混合控制器Bhc中引入了比例控制项,则
(13)
式中:kp>0为比例系数;切换控制BSW= Κsign(S)。
对于t≥0,在滑模面上的速度跟踪偏差方程变为
(14)
将式(13)代入式(8),得速度跟踪的误差方程
(15)

此时,免疫遗传神经滑模控制律变为
(16)
式(16)利用切换控制消除了误差,但引起了抖振。于是利用自适应模糊策略来调整滑模控制增益K消除抖振。将滑模面作为模糊系统的输入,将ki模糊化并作为模糊系统的输出。则模糊规则[9-11]为

(17)

(18)
于是可得免疫遗传模糊神经滑模动力学控制器为
(19)
采用基于反演(Backstepping)控制算法[6]式(20),作为系统运动学控制器。
(20)
式中,γi>0,i=1,2,3。
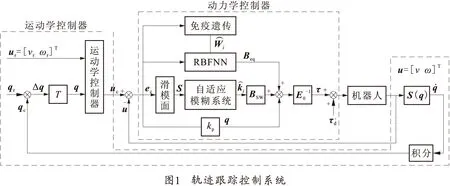
轨迹跟踪控制系统中,如图1所示。

3 仿真试验分析
为了验证本文算法的有效性,对圆形轨迹进行了轨迹跟踪仿真与试验。假设给定的参考轨迹圆
的圆心在(0,0)点,半径为1m。取参考速度vr=0.3m/s,ωr=0.1rad/s;参考轨迹初始位姿xr(0)=1,yr(0)=0,θr(0)=π/2;受控机器人的初始位姿为x(0)=1.2,y(0)=-0.3,θ(0)=2π/3;机器人的初始速度为vc=0.4m/s,ωc=0.3rad/s;初始位姿误差为qe=[-0.2,0.3,-0.5]。
试验中的机器人系统及相关控制参数设置为γ1=5,γ2=10,γ3=5,kp=10,k1=k2=5,λ=10;取免疫遗传算法初始群体为100;迭代次数为300;交叉概率pc=0.8;变异概率pm=0.05,α=β=0.5,ζ=0.5;机器人所受到的扰动τ′d=[3sint,3sint]T。仿真后得到的相应跟踪结果如图2所示。
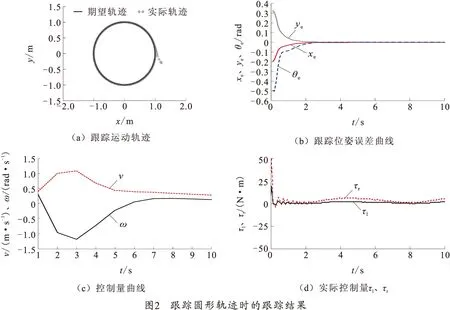
从仿真结果可以看出,系统能够在3 s内进入稳定状态,并能够跟踪圆形轨迹。基于本算法,跟踪误差收敛速度快且稳定,实际的角速度与线速度都能收敛到对应的参考值,最终跟踪误差在系统要求的范围内。在免疫遗传和自适应模糊系统的调节下,消除了滑模控制存在的不确定性和抖振现象。
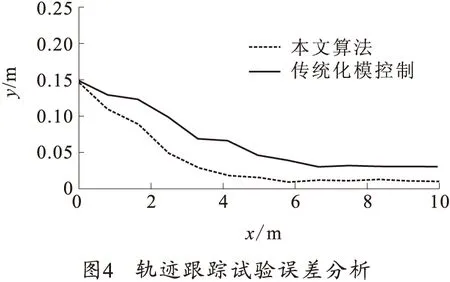
为了进一步验证混合轨迹跟踪控制算法的实用性,以圆形轨迹进行了实物试验,轨迹跟踪控制试验场景如图3所示。将本算法与传统滑模控制进行了测试,试验结果平均误差比较如图4所示。
通过实际轨迹跟踪控制试验,本算法的实用性得到了进一步的验证。本算法相比传统滑模控制,跟踪误差和抖振减小了很多,实际跟踪误差在系统要求的范围内,获得了良好的轨迹跟踪控制效果。

4 结论
针对地面作战机器人轨迹跟踪控制问题,提出了基于系统运动学与动力学模型的免疫遗传模糊神经滑模混合控制器。算法中采用径向基神经网络来近似等效滑模控制中的不确定参数,通过免疫遗传算法在线调整径向基神经网络非线性隐含层的结构和参数,提高了学习效率和识别精度。同时利用自适应模糊系统调节滑模控制的增益,减少了系统的不确定性的影响,消除了滑模控制中的抖振现象。利用该算法对圆形轨迹进行了跟踪控制仿真及试验分析,跟踪效果良好,跟踪位姿误差满足系统的要求。
References)
[1]史先鹏,刘士荣,刘斐,等.非完整移动机器人的神经网络滑模自适应轨迹跟踪控制[J].华东理工大学学报:自然科学版,2010, 36(5): 695-701.
SHI Xianpeng,LIU Shirong,LIU Fei,et al.Adaptive neural network sliding mode trajectory tracking control for nonholonomic wheeled mobile robots[J].Journal of East China University of Science and Technology:Natural Science Edition,2010, 36(5): 695-701. (in Chinese)
[2]王宗义,李艳东,朱玲.非完整移动机器人的双自适应神经滑模控制[J].机械工程学报, 2010, 46(23):16- 21.
WANG Zongyi,LI Yandong,ZHU Ling.Dual adaptive neural sliding mode control of nonholonomic mobile robot[J].Journal of Mechanical Engineering,2010,46(23):16-21.(in Chinese)
[3]张鑫,刘凤娟,闫茂德.基于动力学模型的轮式移动机器人自适应滑模轨迹跟踪控制[J].机械科学与技术, 2012,31(1): 107-112.
ZHANG Xin,LIU Fengjuan,YAN Maode.Dynamic model-based adaptive sliding mode trajectory tracking control over wheeled mobile robot[J].Mechanical Science and Technology for Aerospace Engineering, 2012,31(1): 107-112. (in Chinese)
[4]李艳东.非完整移动机器人系统的智能鲁棒控制研究[D]. 哈尔滨: 哈尔滨工程大学, 2011.
LI Yandong.Research on intelligent robust control of nonholonomic mobile robots[D].Harbin:Harbin Engineering University,2011. (in Chinese)
[5]俞其江,刘士荣.基于改进RBFNN与滑模控制的移动机器人跟踪控制[C]∥中国控制与决策学术年会论文集.沈阳:东北大学出版社,2006:1347-1354.
YU Qijiang,LIU Shirong.Tracking control for mobile robots based on improved RBFNN and sliding mode control[C]∥Proceedings of 2006 Chinese Control and Decision Conference.Shenyang: Northeastern University Press,2006: 1347-1354. (in Chinese)
[6]周巍.煤矿井下搜救探测机器人的路径规划及轨迹跟踪控制研究[D].太原: 太原理工大学, 2011.
ZHOU Wei. Study on the path planning and trajectory tracking of the coal mine detecting and rescuing robot[D]. Taiyuan: Taiyuan University of Technology,2011. (in Chinese)
[7]周明希.免疫-滑模变结构理论及其在矢量控制中的应用[D].湘潭:湘潭大学, 2008.
ZHOU Mingxi. Immune sliding mode variable structure theory and its application in vector control[D]. Xiangtan: Xiangtan University,2008. (in Chinese)
[8]LIU Jinkun,HE Yuzhu.Fuzzy global sliding mode control based on genetic algorithm and its application for flight simulator servo system[J]. Chinese Journal of Mechanical Engineering, 2007, 20(3): 13-17.
[9]LI Yufeng, LI Kuiwu, PAN Yutian.Adaptive fuzzy neural sliding mode control based onimmune genetic algorithm for ammunition auto-loading manipulator[J].Journal of Computational Information Systems, 2013, 17 (9): 1-10.
[10]常江.非完整轮式移动机器人的运动控制方法研究[D].哈尔滨:哈尔滨工程大学,2011.
CHANG Jiang. Research on movement control method of nonholonomic wheeled mobile robot[D]. Harbin: Harbin Engineering University, 2011. (in Chinese)
[11]LI Yufeng, LI Kuiwu, PAN Yutian. Fuzzy adaptive sli-ding mode control based on fuzzy compensation for ammunition auto-loading robot[J].Advanced Materials Research, 2013, 816-817: 363-366.
A Trajectory Tracking Control Based on Immune Genetic Fuzzy Neural Sliding Mode for Ground Combat Robot
LI Yufeng1, LI Kuiwu2, PAN Yutian1, GUO Baoquan1
(1.School of Computer and Control Engineering, North University of China, Taiyuan030051, Shanxi, China;2.Northwest Institute of Mechanical & Electrical Engineering, Xianyang712099, Shaanxi, China)
Based on a kinematic controller and a sliding mode dynamics controller with immune gene-tic algorithm fuzzy neural network, a hybrid control algorithm is presented for ground combat robot. In this algorithm, the equivalent sliding mode control is approached by using radial basis function neural network (RBFNN), and the structure and parameters of RBFNN nonlinear hidden layers are tuned online according to immune genetic algorithm for the optimization of the parameters of networks with the gain of sliding mode control adjusted through the adaptive fuzzy systems. Simulation and experimental analysis of the circular trajectory tracking control are carried out by using this algorithm. Compared with the traditional sliding mode control, the proposed controller effectively overcomes the influences of uncertain factors, eliminates chattering of the sliding mode control, and optimizes the dynamic trajectory tracking performance of the system.
sliding mode control; neural network; immune genetic; fuzzy control; trajectory tracking control
10.19323/j.issn.1673-6524.2016.02.004
2015-05-20
国家自然科学基金资助项目(51275489)
李郁峰(1978—),男,博士,主要从事火炮、自动武器与弹药工程方面的技术研究。E-mail:panyutiannuc@163.com
TJ 303+.3;TP242
A
1673-6524(2016)02-0014-05
