基于MATLAB的整体式转向梯形优化设计
2016-09-19喻超王保华湖北汽车工业学院湖北十堰442002
喻超,王保华(湖北汽车工业学院,湖北 十堰 442002)
基于MATLAB的整体式转向梯形优化设计
喻超,王保华
(湖北汽车工业学院,湖北 十堰 442002)
以整体式转向梯形机构的平面模型为基础,建立了以实际外轮转角与理想转角偏差均方根为最小的目标函数。首先根据图解法对整体式转向梯形机构进行了初步分析,然后基于MATLAB优化工具箱,对整体式转向梯形机构进行优化设计,与图解分析结果进行对比,验证了优化结果的正确性。最后基于MATLAB/GUI设计了可视化的交互界面,简化了整体式转向梯形的优化计算。
整体式转向梯形;优化设计;MATLAB/GUI
10.16638/j.cnki.1671-7988.2016.08.046
CLC NO.: U463.45Document Code: AArticle ID: 1671-7988(2016)08-141-04
为了减小行驶阻力和轮胎磨损,理想的转向传动机构应使车辆在转弯过程中各车轮处于纯滚动而无侧滑的状态,即在设计转向梯形时,希望汽车内外轮转角完全符合Ackerman转向原理[1],但是由于转向梯形机构自身的限制,其实际转角与 Ackerman理想转角之间存在一定的偏差。目前对整体式转向梯形机构的优化设计,大多是建立某一目标函数,根据各种约束条件得到最优解[2~4],但求解非线性优化问题时,优化结果与初始条件及约束条件有关,导致优化结果各异且得不到验证。本文首先根据图解法得到某整体式转向梯形机构[5]不同梯形臂长及梯形底角下的实际与理论左右转向轮转角关系曲线,然后提出了一种以实际外轮转角与理想转角偏差均方根为最小的目标函数,通过对转向梯形机构的优化,使其能够最大限度的接近理想转向梯形机构。优化结果与图解结果进行比对,验证了优化结果的正确性,并基于 MAT LAB/GUI,设计了可视化交互界面,能够避免大量的重复性计算,直接得到优化结果,对工程实际具有一定的借鉴作用。
1、整体式转向梯形机构数学建模
1.1理想转角关系的确定
汽车在转向行驶时,受轮胎侧偏角的影响,转向中心点不在后轴延长线,而是位于前轴与后轴的某一点,由于影响轮胎侧偏角的因素很多,此点位置难以确定。为了便于计算,忽略车轮定位参数的影响,假设车轮为刚性体,且转向梯形机构为平面机构。
假设左转为正。若要保证全部车轮绕一个转向中心行驶,则梯形机构应保证内、外车轮转角满足(如图1所示):
其中δi、δo分别为内外轮转角,k为两主销中心线延长线到地面交点之间的距离,l为汽车轴距。由式(1)可得同一轴理想的内外轮转角关系为:
1.2整体式转向梯形数学建模
转向梯形机构一般分为两种:整体式转向梯形与断开式转向梯形机构,而对于转向桥采用非独立悬架的汽车,一般采用整体式转向梯形。当轴距一定时,内外轮转角的关系主要由梯形底角γ及梯形臂长d的设计决定,所以在设计时一般选取这两个关键参数进行优化。当车轮转动时,内、外车轮转角与梯形底角及梯形臂长的关系如图2所示。
根据三角函数关系
可得同一轴实际的内外车轮转角关系如下:
2、初步分析
对于某型号的汽车,其转向机构的基本参数如下:k=2030mm,1=5000mm。在设计转向梯形机构时,梯形底角γ及梯形臂长d过大,将使梯形机构的空间布置困难;γ及d过小时,转向横拉杆上的转向力过大,容易使其发生变形,影响转向精度。转向梯形机构的优化意味着在满足约束条件的情况下,要使实际的内、外轮转角关系尽可能的接近阿克曼理论转向。这里假设满足阿克曼运动学条件就是理想的转向系统,那么可以首先通过图解法比较所设计的转向梯形与理想的转向梯形之间的关系,来评价设计的优劣。
通过对相同梯形臂长,不同梯形底角的转向梯形机构的分析(如图3所示), 可以看出:在相同的内轮转角下,随着梯形底角的增大,实际的内外轮转角关系曲线逐渐偏离Ackerman理想转角关系。当内轮转角在 10°范围以内时,曲线重合度较好;当内转向轮大于10°后,当梯形底角γ略大于70°时曲线与Ackerman理想曲线重合度最好。不同的梯形底角γ对内外轮转角关系影响较大。
当梯形转向机构的梯形底角相同,取不同的梯形臂长值时(如图4所示),可以看出,梯形臂长对内外轮转向关系影响较小,但是误差值Δδo与梯形臂长成正比变化。
由上图我们得到如下结论:梯形底角的变化对内外轮转角之间的关系有较大影响,梯形臂长的变化则影响梯形转向机构的空间布置,进而影响汽车转向性能的改变。
3、建立目标函数
3.1整体式转向梯形数学建模
对于梯形转向机构的优化设计问题,其实是一个小型约束非线性规划问题,可以通过调用 MATLAB(2014a)优化工具箱中的fmincon函数来求解这个问题。

由于式(6)中的δDO及δAO为连续变量,对于所设计的梯形转向机构而言,不能明确定义目标函数。因此,可以将式(6)改写为在转向梯形机构一般工作范围-30°≤δi≤30°内的偏差函数:
通过对一系列δi的计算分析,我们可以得出偏差e的变化趋势。如果可以得到e的最小值,那么就可以找到相应的最优解,另外,也可以通过分析e的变化趋势来得到寻找最优解的方向。
3.2约束条件

其中δmaxo为最大外轮转角。
3.3优化结果分析
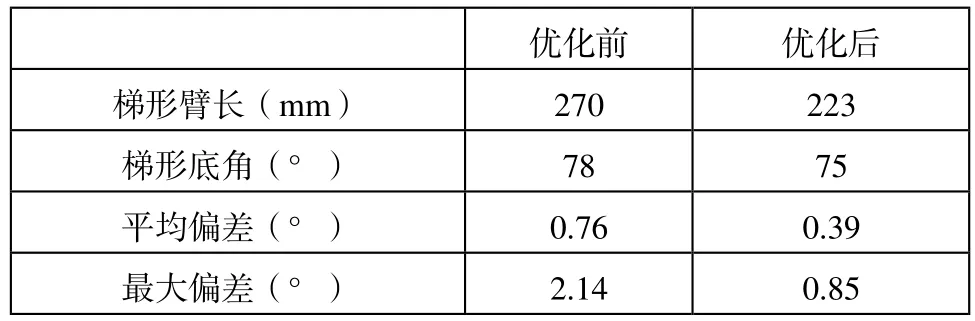
表1 某汽车转向梯形机构优化结果
从表1可以看出,经过目标函数的优化,在整个转向梯形工作范围内,实际的外轮转角与 Ackerman理论外轮转角之间的平均偏差减小了0.4°左右,最大偏差值减小了1.3°。为了防止优化后的局部最优解,将优化值与图3、图4的初步分析结果相对比,证实了优化结果与图解法相吻合,证明了优化程序的正确性。优化结果比较理想,可以有效提高转向精度,改善轮胎的磨损。
4、GUI界面设计
为了更加直观便捷地体现实际的内外轮转角与Ackerman理论转角之间的变化关系以及优化效果,基于MATLAB/GUI,设计了一个可视化的交互界面。GUI是指由窗口、菜单、按键、光标、图标、对话框及文本框等各种图形对象组成的用户界面,它让用户定制用户与MATLAB的交互方式。在此界面下,用户通过输入汽车基本参数如两主销中心距、汽车轴距以及允许的最大内轮转角,以及待优化的转向梯形机构梯形底角及梯形臂长的初始值,通过点击优化按钮可以直接得到优化后的结果,并可以输出优化前后内外轮转角与 Ackerman理论值之间的关系曲线以及优化后的外轮偏差曲线,如图5所示。
5、结语
本文通过对某汽车转向梯形机构的初步图解分析,以及MATLAB优化工具箱进行优化,得到了能够最大程度接近Ackerman理想转角关系的转向梯形机构,两者相互印证,保证了优化结果的正确性。并基于MATLAB/GUI,设计了人机交互的可视化界面,通过简单的参数输入,即可得到最优值,且能直观地了解实际梯形转向机构的内外轮转角与理想转角之间的关系,对工程实践具有一定的指导作用。
[1]Simionescu,P.A,Beale,D.Optimum synthesis of the four-bar generator in its symmetric embodiment:the Ackermann steering linkage[J].Mechanism and Machine Theory,2002,37(12):1487-1504.
[2]刘旋,李腾飞,郑帅广.汽车整体式转向梯形机构优化设计[J].汽车实用技术,2014,3:28-30.
[3]王计广,邢号彬,常秀岩,等.基于MATLAB优化工具箱的整体式转向梯形优化设计[J].汽车零部件,2010,10:60-62.
[4]何正强,石凯凯.整体式转向梯形机构的优化设计[J].现代机械,2012,2:33-35.
[5]Reza N.Jazar.Vehicle dynamics:theory and application[M].Phoenix Lieb press,2008.
[6]罗永革,冯樱.汽车设计[M].北京:机械工业出版社,2011.
Optimization Design Based on MATLAB for Integral Steering Trapezoidal Mechanism
Yu Chao,Wang Baohua
(Hubei University of Automotive Technology,Hubei Shiyan 442002)
Based on the plane model of integral steering trapezoidal mechanism,an optimum math model of objective functions which is minimum error of root mean square between practical and ideal outer corner angle was established.Firstly,according to the graphic method,the integral steering mechanism was analyzed,and based on the MATLAB optimization design of the integral steering trapezoid mechanism was carried out to verify the correctness of the optimization results.Finally,the interactive interface was designed based on MATLAB/GUI,which simplifies the optimization calculation.
integral steering trapezoidal mechanism; optimization design; MATLAB/GUI
U463.45
A
1671-7988(2016)08-141-04
喻超(1991-),男,硕士研究生,就读于湖北汽车工业学院,从事传动与控制方面的研究。
湖北省自然科学基金(2015BAA046)。
