基于PIR的三角交叉定位技术研究
2016-09-16王淑平中北大学电子测试技术国家重点实验室太原030051中北大学仪器科学与动态测试教育部重点实验室太原030051
王淑平,杨 卫*,侯 爽(1.中北大学电子测试技术国家重点实验室,太原030051;2.中北大学仪器科学与动态测试教育部重点实验室,太原030051)
基于PIR的三角交叉定位技术研究
王淑平1,2,杨卫1,2*,侯爽1,2
(1.中北大学电子测试技术国家重点实验室,太原030051;2.中北大学仪器科学与动态测试教育部重点实验室,太原030051)
由于单个PIR构成的单节点探测视场存在大量的探测盲区,盲区所占面积相对较大,不能对目标实施有效定位,定位误差基本上达到1.5m~2.5m左右,基于此,提出了三角交叉定位技术研究。采用位于同一平面内的三个节点,对同样位于同一平面的目标进行交叉定位,经过实验验证,目标定位误差可以减小到1m以内,定位精度得到了一定程度的提高,具有一定的实际应用价值。
单节点;三角;交叉定位;定位精度
热释电红外(PIR)传感器[1-2]以非接触形式检测环境中红外辐射的变化,对人体运动具有非常高的敏感度,并且具有适用范围广、隐蔽性强和受环境光线干扰小等优点,因此基于PIR定位与轨迹获取技术受到关注[3]。目标检测与轨迹跟踪是智能监控、高级人/机接口、运动分析和行为理解等涉及的共性关键技术,在灾害救助、安防以及医疗监护等有着广泛的应用价值[4]。基于PIR的单节点探测是对PIR的深层次应用的初步探索,然而目标的运动方向和运动路径具有不可控特点,要求目标的运动方式符合单节点对目标定位的要求几乎不可实现,一旦目标通过探测区域的盲区时,单节点将不能对目标实施有效定位。在以上的技术基础上,提出了多节点目标交叉定位技术,弥补单节点定位的不足。
1 热释电传感器测距原理
将传感器探测视场抽象为图1所示,点O表示感知节点的一个传感器探测单元,线段OA、OB表示由探测单元所形成的探测视场,由于所形成的探测视场的尺寸同两视场间盲区距离相比基本可以忽略,从而在图中用两条线段代替两敏感元所形成的探测视场。θ表示传感器探测单元的探测视场角,该角由热释电传感器本身的视场角和所用光学镜片共同确定[6-10],当传感器和光学镜片选定后,该角度便被确定下来,为一个定值。线段OC表示需要测量的目标到探测节点的距离,在图中用d表示。线段AB表示目标通过所在距离处盲区距离,不同距离处两探测视区间盲区距离是确定的,在图中用L表示。

图1 传感器探测视场示意图
在图1中,由直角△OCB中,有∠BOC=θ/2,BC= L/2,由于θ与L是已知量,在△OCB中,有

由上式可知,当L与θ确定时,目标距传感器的距离d便能计算出来。
2 多节点探测原理
利用多节点[11-12]实现运动目标定位的理论推导过程建立在单节点目标定位基础之上。在图2(a)中,对两个探测节点所形成的探测区域S而言,由于节点间距远大于单个节点内的探测单元的距离,所以节点O1、O2等效于点元。假设已经知道O1、O2的探测结果θ1、θ2、L1、L2。如图2(b)所示,从节点O1、O2沿θ1,θ2方向作定位线O1P、O2P,交点P就可以作为目标出现的位置。假设M点是真实的目标位置,可以看出,测量点P与真实目标点M之间还是有一定差距的。这个误差主要来源于节点O1、O2的测量误差。

图2 两节点目标定位示意图
当平面内节点数目增多,测量值P的误差将减小。图3展示了同一平面内分布有3个节点O1、O2、O3时的定位图。由于节点间距远大于单个节点内的探测单元的距离,所以节点等效于点元,O1、O2、O3构成三角。假设已知3个节点的3个协同定位传感器定位结果θ1、θ2、θ3、L1、L2、L3,3条定位线L1、L2、L3的交点围出一个三角形ABC,目标很大可能应该出现在三角形内部,所以就以三角形ABC内一点M作为目标的测量位置点。
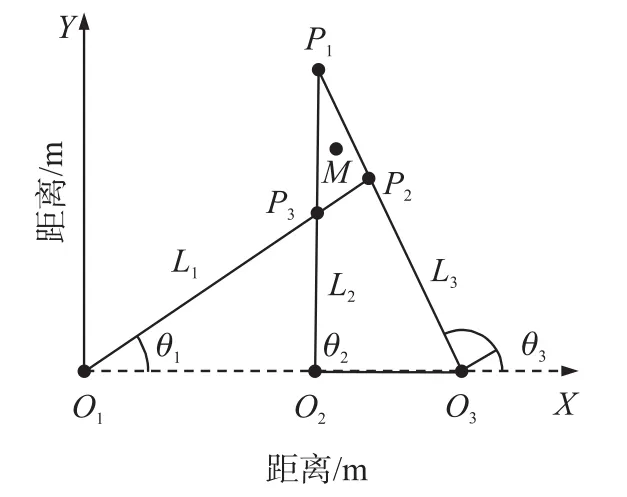
图3 三节点目标定位示意图
2.1三节点目标测距原理
目标位置点M的计算方法如下:
原理如图4所示。O1、O2、O3代表3个节点,每个节点等效为一个点。在xoy坐标系中,O1、O2、O3坐标分别为(x1,y1)、(x2,y2)、(x3,y3)。

图4 三节点目标测距原理示意图
假定3个节点已测得方向角为θ1、θ2、θ3,那么可以得到分别通过O1、O2、O3的定位线L1、L2、L3的定位线方程为:

其中

O1、O2、O3交于点P1,P2,P3,它们坐标分别为(xp1,yp1)(xp2,yp2)(xp3,yp3),那么由以上定位线方程可以得到:

P2P3、P1P3、P1P2的中点D、E、F的坐标分别为(xD,yD)(xE,yE)(xF,yF),其中
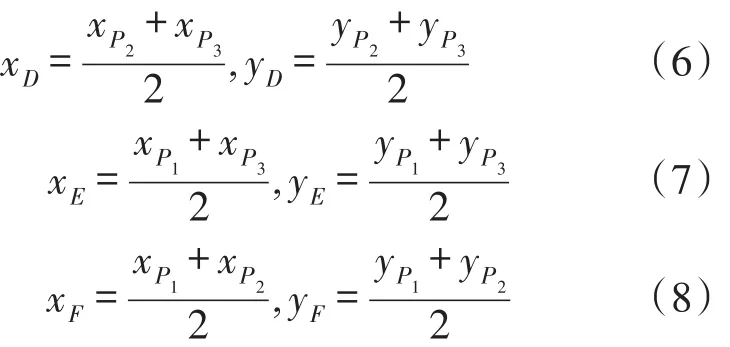
则测得目标距探测器的等效距离r1=||O1D ,r2=||O2E,r3=||O3F。假设各节点所测量的方向角的标准差分别为Δθ1、Δθ2、Δθ3,当Δθi非常小时,目标到定位线距离等效为:σi≈risin( )Δθi≈riΔθi,其中i=1,2,3。
根据Jacobi定理[13],已知3定位线交点(xp1,yp1)(xp2,yp2)(xp3,yp3),可以得到目标点 M的位置(x0,y0)为:

其中D1、D2、D3为决定性因子。
3 三角交叉定位仿真及结果分析

图5 三角阵法实现目标协同定位示意图
在图5(a)中,虚线表示的是O1节点00方向传感器,O2节点90°方向传感器,O3节点180°方向传感器各自的探测区域,点A、B、C、D、E、F为3个传感器探测区域的交点,S即为交点A、B、C、D、E、F所构成的协同定位区域。
在图4(b)中,利用三角阵进行目标定位仿真。假定3个节点O1、O2、O3在平面xoy内坐标分别为(0,10)、(20,0)、(40,10)(m)。假设目标通过区域S时,3个相关传感器均检测到目标,3节点探测到的目标的距离分别为L1、L2、L3,方向角分别为θ1、θ2、θ3。假设目标出现在M点(21,9)时,3节点对目标的探测形成一个三角形区域,如图5(b)中所示。在MATLAB平台上,对该种情况进行定位实验。实验结果如表1所示。
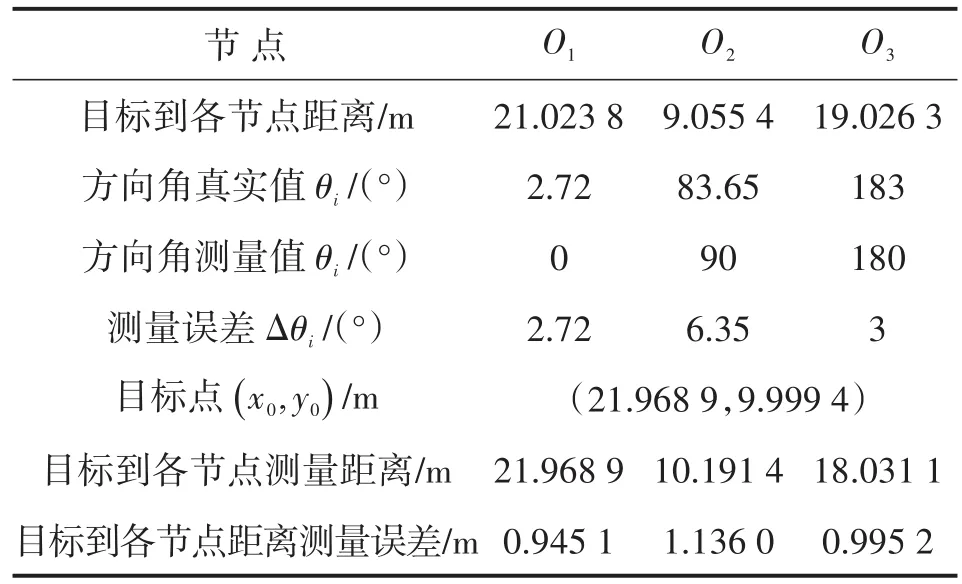
表1 利用三角阵目标协同定位实验结果
由仿真结果可以看出,利用三角阵法定位,目标定位误差得到降低,从单节点定位误差1.5m~2.5m左右减小到1m左右,目标定位精度得到一定程度的提高。
4 结束语
从实验结果可以看出,基于PIR的多节点测距定位方法提高了定位精度,使误差缩小到1m范围之内。本研究从PIR原理入手,对多节点目标交叉定位技术的准确性进行了实验验证,拓宽了单节点PIR的使用范围,为静态热释电传感器测距提供了一种新思路。
[1] 徐微,杨卫.一种红外传感器阵列探测方法的研究[J].传感器与微系统,2009,28(9):16-18.
[2] 申柏华,罗晓牧,王国利.运动检测与定位的热释电红外传感新方法[J].光电子·激光,2010,21(9):1351-1353.
[3] 李博雅,李方敏,刘新华,等.基于PIR Sensor的单目标跟踪系统的设计与实现[J].传感技术学报,2014(9):1214-1220.
[4] 魏丽君,唐冬梅,肖辽亮.基于热释电红外传感器微弱信号处理电路的设计与分析[J].仪表技术与传感器,2013(7):89-91.
[5] 陈锋莉,马海英,吴达,等.多站多目标交叉定位技术[J].火力与指挥控制,2011,36(9):85-87,92.
[6] 孙乔,杨卫,于海洋,等.动态下红外热释电传感器的目标定位方法[J].红外与激光工程,2012,41(9):2288-2292.
[7] 杨卫,李波,孙乔,等.基于热释电红外传感技术测距的时间差法研究[J].传感器与微系统,2013,32(4):37-40.
[8] 李格,袁宁一,李金华.热释电单元探测器的电压响应模拟[J].电子器件,2002,25(4):461-465.
[9] 吴顺伟,朱丽娜,朱磊,等.基于热释电传感器的位置相关算法研究[J].山东农业大学学报(自然科学版),2006,37(3):449-452.
[10]徐克宝,高洁,鞠晓君,等.具有抗环境热源干扰的热释电探测器的应用研究[J].传感技术学报,2006,19(3):758-762.
[11]孙乔,杨卫,张文栋,等.动态热释电传感器网络目标跟踪技术研究[J].光电子·激光,2013,12:2399-2403.
[12]刘前进,杨卫,赵迪,等.多PIR动态扫描下的区域目标定位方法[J].科学技术与工程,2014,14(23):205-208.
[13]范斌,马昌凤,范斌,等.求解非线性互补问题的一个雅可比光滑化方法[J].福建师范大学学报(自然科学版),2012,28(3):26-31.

王淑平(1990-),男,汉族,江西吉安人,中北大学仪器与电子学院硕士,主要研究方向为测试计量技术,935924529@ qq.com;

杨卫(1957-),男,汉族,山西太原人,研高工,研究方向为微纳米器件、仪器与测试技术、微系统及集成技术、网域化微武器系统,yangwei@nuc.edu。

侯爽(1988-),女,吉林白城人,硕士研究生,主要从事传感器信号处理方向研究,hs19880526@163.com;
Based on the Law Triangleof PIR Positioning Method
WANG Shuping1,2,YANG Wei1,2*,HOU Shuang1,2
(1.North Uniυersity of China,National Key Laboratory forElectronic Measurement Technology,Taiyuan 030051,China;2.North Uniυersity of China Key Laboratory of Instrumentation Science&Dynamic Measurement,Taiyuan 030051,China)
Due to a single PIR form of single node detection field,there are a greatnumber of blind spot detections ofblind areas.The blind area is relatively large.Itcan't implementefficiently to position on the target.The positioning error reaches about from 1.5m to 2.5m.Based on this,itputs forward the law triangle positioningmethod,uses the three nodes in the same plane and fixes the cross located on the same plane of the same goal.Through experimental verification,the target positioning error can be reduced to less than 1m to improve the positioning accuracy ofa certain leveland ithas certain actualapplication value.
single node;law triangle;cross location;positioning accuracy
TP212.9
A
1005-9490(2016)04-0825-04
2015-08-11修改日期:2015-10-28
EEACC:7320G;723010.3969/j.issn.1005-9490.2016.04.015
