卵石河床急流航道铲斗(抓斗)挖泥船定位系统设计
2016-09-15徐本举
徐本举
(长江重庆航道工程局,重庆 400011)
卵石河床急流航道铲斗(抓斗)挖泥船定位系统设计
徐本举
(长江重庆航道工程局,重庆 400011)
结合长江重庆主城区航道条件,设计开发自航钢耙抓斗挖泥船钢桩定位装置,比较分析锚缆定位绞车移船方式与钢桩定位移船方式的特点,对3种定位桩升降装置进行计算分析,确定“长鹰7”定位系统采用四桩-液压环梁升降装置型式,使用表明该装置是卵石河床急流航道铲斗(抓斗)挖泥船先进、高效、准确、可靠的定位系统。
卵石河床航道,铲斗(抓斗)挖泥船,液压环梁升降装置,定位桩
长江重庆主城区航道水流湍急、河床以板结砂及卵石为主,该航段过往行船多、两岸趸船的过江锚链多,不能禁航施工。为此,开发自航桩定位钢耙抓斗挖泥船——“长鹰7”。该船为双机双导管桨电力推进的自航工程船,具有抓斗、反铲和钢耙挖掘三种作业功能,采用单底单甲板、勺形艏方艉船型[1-2]。该船采用钢桩系统进行定位及移船,本文主要介绍其定位系统的研制。
1 环境条件
施工水深:2.5~8.0 m;
施工最大流速:3 m/s;
航行最大流速:4 m/s;
最大航行∕作业风级:蒲式6级∕5级;
船舶水面以上固定建筑物高度不大于17.5 m。
疏浚土质:板结沙卵石;
河床土壤名称(组成):卵石土;
河床土壤粒径d50=100 mm;
河床土壤最大粒径=500 mm;
竖向单位极限阻力qp=2 500 kPa;
侧向单位极限摩擦力qf=150 kPa。
2 主要问题
长江重庆主城区航道狭窄、航运繁忙,如果采用传统的锚缆定位,锚缆系统将占用大量航道,疏浚施工与通航矛盾十分突出。
长江重庆主城区航的河床为板结卵石覆盖层+中风化岩石河床,且覆盖层较小,船舶移船定位的可靠性与安全性是需要解决的关键问题。
本船施工河段趸船过江锚链较多,在探明锚链位置后,挖掘时既要保证航道疏浚尺度,又要避开锚链,就必须提高船舶定位质量与精度。
3 船舶定位移船方式的选择
3.1国内、外相关技术概况
目前,国内外抓斗(铲斗)挖泥船定位移船方式主要有二种,一是锚缆定位绞车移船方式,二是钢桩定位台车(钢桩倾斜)移船方式。见表1。
由表1可见,抓斗式挖泥船可选用锚缆或钢桩定位,铲斗挖泥船一般均采用钢桩定位,钢桩的升降采用绞车钢丝绳的方式较多。但对对长江上游硬质河床而言,钢桩的升降方式需进一步探讨。
3.2锚缆定位绞车移船方式
锚缆定位为柔性定位,较适合于深水水域,但其定位精度低,船舶易漂移;该系统较适合挖掘软质土,挖掘较硬土质时,船舶晃动加剧,挖掘操纵难度大;同时由于锚缆展布占用水域大,对水深有一定要求,施工干扰大。
采用锚缆定位时,一般情况下需要6只锚缆,船首抛一只主锚,左右各两只边锚,船尾抛一只尾锚。如在水流较急的航道施工,船首和船尾也可各抛二只锚。除每个锚配绞车外,主锚还需配容缆绞车;为了减少碍航,还需配置价格不菲的水下出缆装置[3]。

表1 国内外抓斗(铲斗)挖泥船定位移船方式概况
施工时,主锚一般抛出400~500 m,最大可达1 000 m,尾锚和边锚一般抛出100~200 m,因此,施工船舶在航道上所占的面积最小为
(1)
式中:l艏、l艉——艏、艉抛锚距离,分别为400和100 m;
b左,b右——左、右抛锚距离,均为100 m;
L,B——船长、船宽,分别为52和14 m。
由此得Smin=118 128 m2,由于锚在卵石河床上抓着较困难,故在卵石河床上定位使用的锚缆和绞车比常规要大。
3.3钢桩定位移船方式
钢桩式液压铲斗(抓斗)挖泥船定位时只需将钢桩插入河床中即可。移动时只需将部分定位桩提起,利用其他定位桩的台车移动牵引船舶移动。
挖泥船施工时占用航道的最小面积为船舶正投影面积=船长×船宽,即52×14=728 m2。
3.4两种定位移船方式比较
上述两种方式的特点比较如表2。

表2 两种定位移船方式比较
综上比较,钢桩定位较锚缆定位的铲斗(抓斗)挖泥船,在狭窄航道施工时,对通航的影响更小,在砂卵石河床上定位的可靠性和准确性更高[4],因此,本船选用钢桩定位移船方式,总布置见图1。

图1 总布置
4 钢桩升降方式的选取
铲斗(抓斗)挖泥船作业时挖掘机巨大的切削力、水流和波浪会引起船体的烈剧升沉和摇摆运动,各种载荷最终均作用在钢桩上。同时,由于长江上游河床为板结砂卵石覆盖层+中风化岩石河床,且覆盖层较小,靠自身重力的常规抛桩方式是无法实现牢固定位的,需通过抬升船体,利用船体的重力才能将钢桩插入河床,实现可靠定位;移船前,需采用钢桩升降装置将桩拔出。为了保证挖泥船正常施工,钢桩升降装置必须具有足够的压桩及拔桩能力,确保能将定位桩压进去、定得住、拔得出。
4.1压桩力及拔桩力的选取
经过综合论证,本船在船艏设2套台车定位桩,船艉设2套固定定位桩,定位桩主要参数为
定位桩长度18.50 m;直径1.00 m;重量19.00 t。
4.1.1压桩力计算
定位桩插入时,河床泥土对定位桩阻力即为所需要的最大压桩力,为了准确计算压桩力,采用两种方式进行计算[5]。
1)参照《疏浚岩土分类标准》(JTJ320-96)。
根据《疏浚岩土分类标准》(JTJ320-96):疏浚河床土质的标准惯入击数N<25,疏浚河床土质的标准抗压强度Rc1=5 MPa,压桩力N为
(2)
式中:N1——桩尖阻力,N1=1 000πd2q1/4;
N2——桩侧摩擦力,N2=πdq2h;
q1——桩尖的极限单位阻力,3 MPa;
d——定位桩直径,1 m;
h——定位桩插入泥土深度3 m;
q2——桩側的极限单位摩擦力,55 kPa。
由此计得N=2 873.1 kN。
2)按长江航道重庆主城区猪儿碛河段卵石土调查数值计算,式(2)中各参量如下。
式中:q1——桩尖的极限单位阻力地质勘探实测值,2.5 MPa;
d——定位桩直径1 m;
h——定位桩插入泥土深度,3 m;
q2——桩側的极限单位摩擦力地质勘探实测值,150 kPa。
由此计得N=3 375.51 kN。设计压桩力取4 000 kN。
4.1.2拔桩力计算
1)参考《工程地质手册》[6],所需的拔桩力为
(3)
式中:W——定位桩自重重力,190 kN。
由此计得T=2 084 kN。
2)设计拔桩力取2 400 kN。
4.2船舶作业需要定位桩插入河床最小深度
以拉列王琴和别赞切夫理论为依据,本船在抓斗机工作时,定位桩入土点作为弹性固定端,定位桩入土部分可视为桩顶自由并受横向载荷作用的刚性短桩,在载荷的作用下不产生挠曲变形。计算插入河床最小深度。
(4)
式中:L——钢桩的入土计算深度,cm;
F——铲斗作业时的最大水平力,300 kN;
K0——水平地基反力系数,50 N/cm3;
d——钢桩直径,100 cm;
y——桩在河床面处的水平位移,1 cm;
n——钢桩数量。
n=1时,L=138.5 cm;n=2时,L=692.5 cm。
由上可见,当仅1根定位桩插入河床时,定位桩插入的深度不能小于1.385 m;当有2根定位桩同时插入河床时,定位桩插入的深度不能小于0.692 5 m。
4.2.2定位桩自由落体时插入河床深度计算为(不计水阻力)
h=mgH/N
(5)
式中:h——定位桩插入河床深度,m;
m——定位桩质量,19 000 kg;
g=9.8 m/s2;
H——桩尖到河床面的高度,H=6 m;
N=3 375 500 N(河床对桩阻力)。
计得h=0.33 m。
由此可见,定位桩以自由落体状态插入河床(不计水阻力)的深度较为0.33 m,这一深度无法保证船舶牢固定位。因此,安装钢桩升降装置进行压桩和拔桩势在必行。
4.3钢桩升降装置的选择
目前,应用较为广泛的钢桩升降装置有齿轮齿条升降装置、液压环梁升降装置以及缆索式升降装置三种类型。
4.3.1齿轮齿条升降装置
齿轮、齿条式升降装置优点是升降速度快、控制简单、操作方便,运行平稳连续,适合于移位比较频繁的工程船。缺点是需要配置较复杂的变速机构,齿轮和齿条的制造工艺要求高,造价高。目前国际上抓斗挖泥船应用较多,如国内的“新海蚌”和 “长鹰50”,但其齿轮齿条式升降装置均采用日本原装进口。
4.3.2液压环梁升降装置
液压液压环梁升降装置的优点是力传递简单直接,运行平稳可靠,控制简单,易于实现系列化和通用化,插桩和拔桩能力强,可满足钢桩预压要求,造价低,使用维护方便,在海洋工程平台上有较多应用。缺点为升降速度较慢,倒桩较难。
4.3.3缆索式(绞车、钢丝绳和滑轮)升降装置
缆索式升降装置具有运行平稳连续,升降速度快,控制简单,最大插桩力(钢桩预压力)和拔桩力可为绞车额定拉力的4倍,可满足钢桩预压要求,适合于移位比较频繁的工程船。缺点是对液压升降绞车、齿轮箱和钢丝绳的质量要求很高(多采用进口产品),使用维护、保养要求高。
4.3.4升降装置的比选
表3为对上述三种钢桩升降装置的比较。

表3 三种钢桩升降装置的比较
由表3比较,液压环梁升降装置在工作性能、可靠性、安全性和投资与维护成本方面具有一定优势。虽然在升降速度和倒桩方面存在不足,但由于长江上游挖泥船挖深较小,钢桩升降距离短,对升降速度要求不高;同时本船几乎无长途调遣,钢桩高度可满足调遣区域限高要求,不需倒桩。因此本船选用液压液压环梁升降方式。
4.4液压环梁提升装置
4.4.1设备结构及特点
液压环梁升降装置(见图2)广泛应用于自升工程船舶或平台,可为采用管状(圆形或方形)桩腿的工程船舶(平台)提供合适的升降能力和一定的风暴保持力。该装置主体上布置的上下两道环梁、连接两道环梁的液压油缸、和每道环梁上的可插拔的液压销组成,配用专用的液压系统,利用两道环梁的插销交替插入钢桩(桩腿)上的销孔,使液压油缸以步进方式改变钢桩和主船体间的相对位置,以达到压桩(升船)的目的[7]。

图2 环梁升降装置结构示意
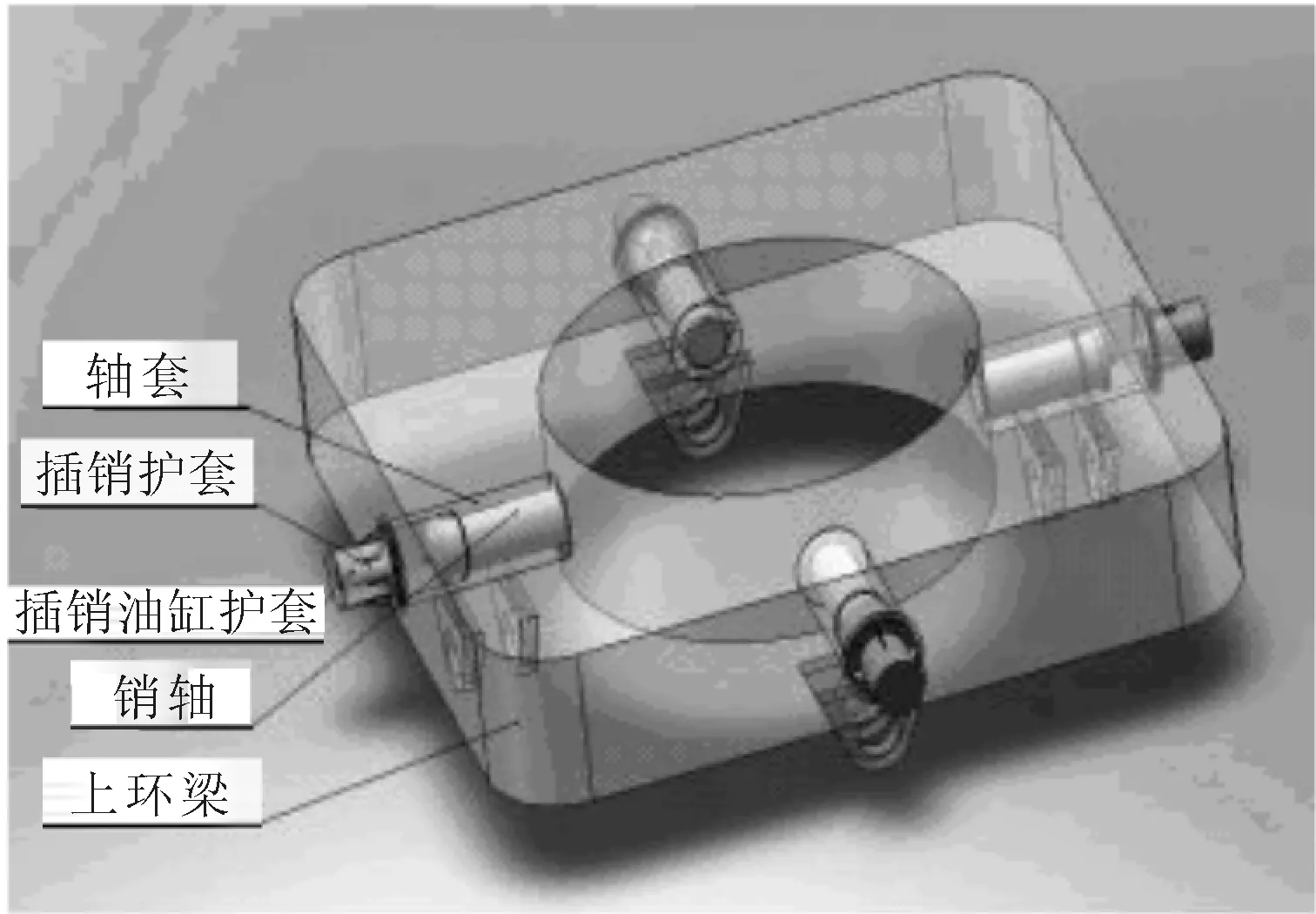
图3 环梁模型结构示意
升降装置包括有上下两道环梁(见图3),每道环梁装有液压插销,插销伸出时,可插入钢桩上的销孔,使环梁固定在钢桩上的某一高度。
下部环梁固定在船体(或台车)上,上部环梁为活动环梁,当下环梁的销子没有插入钢桩,而上环梁的插销插入钢桩销孔时,通过液压油缸的伸缩,使船体相对于钢桩的位置发生变化。通过上述步骤,船舶可以以步进形式被抬高或降低,当船舶为浮态时,可进行压桩或拔桩操作。
本船共设有4根定位桩,每根桩腿配有1套液压环梁升降装置,4套装置共用一套液压泵站,组成全船的升降系统。通过液压阀件的切换,可以单独操作任一桩腿升降单元进行压桩或拔桩作业,也可四套装置同步工作。
4.4.2升降装置的组成
环梁升降装置的组成见表4。
4.4.3环梁升降装置主要技术参数
环梁升降装置数量:4套;
单桩最大压桩能力:4 000 kN;
单桩最大拔桩能力:2 400 kN;
压桩速度(入土前/后):1.8/0.42 m/min;
升桩速度(入土前/后):1.2/0.42 m·min-1;
船体抬升速度:0.42 m·min-1;
船体下降速度:1.2 m·min-1;
升降油缸径/杆径-行程:300/180-1 280 mm;
液压系统额定/最大压力:25/30 MPa;
油缸数量:4只/套。
5 钢桩系统设计
钢桩系统(见图4)作为船舶定位移船系统的核心设备,钢桩必须具备足够的强度及刚度,其受力较为复杂,必须承受流、风、浪对于船舶的冲击力、液压环梁升降装置的作用力以及铲斗切削时的反作用力[8]。同时,反铲(抓斗)挖泥船在作业时,还必须绑拖不少于两艘驳船(一艘满载,一艘空载)及配套拖船、锚艇,在计算流、风、浪对于船舶的冲击力时,这些辅助船所受的冲击力也应一并考虑,通过有限元分析等方法[9],设计了满足要求的船体结构。

图4 定位桩系统图
为准确校核定位桩的强度及刚度,对定位桩在6种工况(工况1:压桩工况、工况2:拔桩工况、工况3:挖掘机横向抬泥工况、工况4:挖掘机纵向抬泥工况、工况5:挖掘机横向挖泥工况、工况6:挖掘机纵向挖泥工况)下的受力及变形采用有限元计算软件MSC.PATRAN进行分析,模型(见图5)及载荷符合《钢质内河船舶建造规范》(2009)第1篇第10章[10]的有关要求:

图5 有限元模型
桩体结构材料选用CCSDH36,按材料强度校对模型受力状况,屈服应力为355 MPa,根据《海上固定平台入级与建造规范》[11]、《船舶与海上设施起重设备规范》2.4.9及3.2.16,对定位桩取安全系数1.6,材料的屈服应力值为222 MPa,应力值校核见表5。
表5表明:各种工况下,钢桩板元相当应力均小于其材料屈服应力,定位桩上端部最大变形量为钢桩总长的0.8%,其强度和刚度能满足规范要求。

表5 各种工况下钢桩刚度及强度校核汇总表
6 结束语
本项目首次在卵石河床急流航道铲斗(抓斗)挖泥船上采用配有液压环梁升降装置的钢桩系统安全可靠,特点突出、效果显著[12]。
挖泥船占用航道面积小,可实现不禁航施工。与长江上游现有同类型锚缆式挖泥船相比,“长鹰7”施工时占用航道面积仅为0.6%。在狭窄航道施工时,可实现不禁航施工。
压桩、拔桩能力强,适用范围广。本系统具有强劲的压拔桩能力,能在板结密实的砂卵石等多种河床上将钢桩压入和拔出河床,实现定位移船作业;四条桩腿可以联动,也独立动作,在不平整的河床也能正常作业,适应各种复杂工况。
定位和移船精准、平稳,挖掘精度和质量高。本系统可将挖泥船船体抬升一定高度时施工,风浪流和挖掘冲击均由钢桩承担,船舶能始终处于平稳状态,可大大提高挖掘精度和质量。
功能完备、安全可靠。液压台车具有提升、下放、锁紧、推移等多种功能,性能可靠,安全系数高,能满足复杂工况条件下挖泥船的安全作业要求。
[1] 程岩,孙长林,张波,等.自航钢耙抓斗挖泥船设计报告[R].武汉金鼎船舶设计有限公司,2011-5.
[2] 罗梁,程岩,徐本举,等.自航钢耙抓斗挖泥船建造项目可行性研究报告[R].长江重庆航运工程勘察设计院,2011-5.
[3] 徐本举.浅谈长江上游航道疏浚船舶技术发展趋势[C]∥世界疏浚协会//中国第四届国际疏浚技术发展会议论文集,重庆,2011-11.
[4] 徐本举.长江专用抛石船取、抛石系统研究与开发[J].船海工程,2013(6).
[5] 中华人民共和国交通部,疏浚岩土分类标准(JTJ320-96)[S].1996-11.
[6] 工程地质手册编委会,工程地质手册[S].北京:中国建筑工业出版社,2007.
[7] 尹秀凤,刘静,李磊.拖航工况自升式钻井平台桩腿结构强度计算分析[J].船海工程,2013(2).
[8] 季湘岚,杨启,陈新权.三桩定位反铲挖泥船栽载荷分析研究[J].船海工程,2015(1).
[9] 朱元瑶,向小斌,王初龙,等.钻井船吊运过程中吊物坠落与甲板碰撞有限无分析研究[J].船舶标准化工程师,2015(2).
[10] 中国船级社,钢质内河船舶建造规范[S].北京:中国船级社,2012.
[11] 中国船级社,海上固定平台入级与建造规范[S].北京:中国船级社,1992.
[12] 范世东,朱汉华,熊庭,等.长江航道局自航钢耙抓斗挖泥船建造项目后评价报告[R].武汉理工大学,2015-5.
Design of the Positioning System of the Dipper (Grab) Dredger in the Torrential Waterway with Pebble Riverbed
XU Ben-ju
(Yangtze Chongqing River Waterway Bureau, Chongqing 400011, China)
In light of the waterway condition of the Yangtze river in Chongqing, the steel pile positioning system for the self-propelled trailing grab dredger. The characteristics of moving ship ways by mooring line winch and steel pile positioning are compared with, and three positioning pile lifting gears analyzed numerically. The Changying 7 positioning system, which has the hydraulic ring beam lifting equipment with four piles, is developed. It is shown that the four pile- hydraulic ring beam lifting gear is the advanced, efficient, accurate and reliable positioning system for the dipper (grab) dredgers used in the torrential waterway with pebble riverbed.
waterway with pebble riverbed; dipper (grab) dredger; hydraulic ring beam lifting system; gauge pile
10.3963/j.issn.1671-7953.2016.01.003
2015-10-19
2015-11-09
交通运输部支持系统船舶建造(购置)项目(交规划发[2010]1号)
徐本举(1966-),男,学士,高级工程师
U674.31;U664.82
A
1671-7953(2016)01-0013-06
研究方向:工程船舶设计
E-mail:xbj1966@163.com
