卫星导航接收机动态性能评估方法
2016-09-14马志超陆瑾戴丹胡立志桑昱胥婕上海市计量测试技术研究院
马志超 陆瑾 戴丹 胡立志 桑昱 胥婕 / 上海市计量测试技术研究院
卫星导航接收机动态性能评估方法
马志超 陆瑾 戴丹 胡立志 桑昱 胥婕 / 上海市计量测试技术研究院
根据卫星导航接收机的应用领域,利用卫星信号模拟器针对导航型接收机动态定位准确度、测速准确度、测向准确度三个主要指标制定了测试方法,并构建了一套评估工具。该工具能够在单次测试完成后输出上述三个指标的统计评估结果,统计评估结果包含均值、方差、圆概率误差等多项参数。研究结果表明,该测试方法及评估工具能够快速、有效地完成卫星导航接收机动态性能的校准。
卫星导航接收机;卫星导航模拟器;动态定位准确度;测速准确度;测向准确度;统计评估
0 引言
随着卫星导航接收机的广泛应用,卫星导航接收机性能测试方法得到广大用户和制造商的关注[1]。卫星导航接收机可分为测量型、授时型和导航型[2],其中测量型接收机主要应用于大地测量领域,授时型接收机主要应用于时间同步领域,这两类接收机使用时需保持静止状态,因此可以利用户外的真实导航信号对其性能进行全面测试。导航型接收机主要应用于各类运动载体,并为运动载体提供实时的位置、速度、航向信息,静态的测试环境不能满足导航型接收机性能评估的需求。另外利用户外真实卫星导航信号测试时,信号易受外界环境的影响,重复性差,准确度无法保证。为了解决上述问题,本文利用卫星信号模拟器开展测试方法研究。卫星信号模拟器能够模拟多系统、多频点的卫星导航信号,具有多种运动模型,具备建立复杂运动轨迹的条件,模拟的卫星信号不受自然环境的影响,而且满足重复性测试的要求[3]。本文依据导航型接收机的应用特点,首先利用卫星信号模拟器建立包含匀速运动、匀加速运动和匀速圆周运动的复杂运动轨迹;其次对动态定位准确度、测速准确度、测向准确度制定完整的测试方法;最后,为了全面评估导航型接收机的动态性能构建了一套评估工具。该评估工具能够对每一类运动模型下接收机的定位、测速和测向性能进行评估,统计评估结果包含均值、方差和圆概率误差等多种形式。
1 动态性能评估方法
卫星导航接收机的动态性能主要包含动态定位准确度、测速准确度和测向准确度[4]三类。本文针对上述三个指标的特性设计了评估方法,该方法的流程如图1所示。首先收集接收机和卫星信号模拟器输出的原始数据,并提取时间、位置、速度、航向等信息,其次计算单次样本的误差,最后对大量样本进行统计分析,得到动态定位准确度、测速准确度和测向准确度的结果。
1.1 单次样本误差分析
动态定位准确度是指,载体运动过程中接收机观测的位置与真实位置之差的统计值。在计算单次样本误差时涉及大地坐标系、地心地固直角坐标系和站心坐标系。大地坐标系定义了一个与地球几何形状最吻合的椭球体来代表表面凹凸不平的地球,利用大地纬度、大地经度和大地高度表征位置信息。地心地固直角坐标系是固定在地球上、随地球一起在空间做公转和自转运动的坐标系。该坐标系以地心为坐标原点,Z轴与地球自转轴重合并指向正北方向,X轴指向本初子午面与赤道的交点。站心坐标系是以用户机某时所处位置P为视觉中心来观测周边物体的相对位置,它的三个坐标轴分别是相互垂直的东向、北向、天向。该坐标系又被称为东北天(ENU)坐标系[5]。在测试动态定位准确度时,真实位置信息和时间信息由卫星信号模拟器提供。依据IEC 61162-2010[6],接收机观测的位置信息和时间信息可由接收机输出的GGA语句获取。GGA语句字段结构如图2所示,其中字段1为时间信息,字段2~5为经纬度信息,字段9~12为高程信息。

图1 卫星导航接收机动态性能评估方法

图2 “GPGGA”语句字段结构
GGA语句提供了接收机在大地坐标系下的位置信息,卫星信号模拟器提供了地心地固直角坐标系下的位置信息,而图1中单次样本误差是指接收机观测值在站心坐标系下的相对真实位置误差,因此为了计算单次样本误差需进行以下三步运算:第一,利用式(1)~(3)将接收机观测的大地坐标系下位置信息(B,L,H)转换至地心地固直角坐标系(x,y,z);

式中:N —— 基准椭球体的卯酉圈曲率半径;
e —— 椭球偏心率,它们与基准椭球体长半径a和短半径b的关系满足:

第二,在地心地固直角坐标系中与真实位置做差得到(Δx,Δy,Δz);第三,利用式(6)将差值转换至以真实值为原点的站心坐标系下,得到(ΔE,ΔN,ΔU)。

测速准确度是指载体运动中接收机观测的速度与真实速度之差的统计值。测向准确度是指载体运动中接收机航向观测值与真实航向值之差的统计值。速度为矢量信息,由速率和航向组成。真实速度信息和航向信息由卫星信号模拟器提供。依据IEC 61162-2010标准,接收机观测的速度信息和航向信息可由接收机输出的RMC语句获取,RMC语句字段结构如图3所示,其中字段1为时间信息,字段7为速率信息,字段8为航向信息。

图3 “GPRMC”语句字段结构
考虑到航向为标量信息,且航向值不会在坐标变换中改变,因此将RMC语句中的航向信息与卫星信号模拟器提供的真实航向信息做标量差,即可得到单次样本的航向误差。在速度误差方面,考虑到速度为矢量信息,因此利用式(7)~(9)将RMC语句中的速率信息与卫星信号模拟器提供的真实速度做矢量差,即可得到单次样本的速度误差。
式中:V和θ —— 接收机的速率和航向信息;
V0和θ0—— 卫星信号模拟器提供的真实速率和航向信息
1.2 误差统计分析
如图1所示,得到大量单次样本的位置、速度和航向误差后需利用统计方法分析接收机的动态性能。依据国家标准和行业规范,常用的统计分析方法分为CEP(圆概率误差)方法、RMS(1倍标准差法)方法和2DRMS(2倍标准差法)方法。CEP方法描述准确度时,定义为以真值为圆心、包围指定概率样本点的圆半径;RMS方法描述准确度时,定义为样本误差的方均根值;2DRMS方法描述准确度时,定义为样本误差方均根的2倍。上述三种方法都可用于描述同一个技术指标,且在统计上满足一定的数学关系。在测速准确度和航向准确度中如速度和航向的样本误差满足均值为0、方差为σ2的正态分布,则CEP方法、RMS方法和2DRMS方法的计算结果在统计上满足如下关系:
在动态定位准确度中,如东向误差、北向误差、天向误差满足均值为0、方差分别为σE2、σN
2和σU
2 的正态分布,误差样本的概率密度函数分别为
满足自由度为2的χ2分布。通过查表(卡方分布临界值表)可以得到不同置信概率条件下水平误差半径与σ的关系为
Δd的方差为2σ2,因此
考虑到实际测试时样本分布不一定完全满足标准正态分布,因此本文提供的测试评估工具将上述结果同时输出,以便用户对测试结果比较分析。
2 试验与结果分析
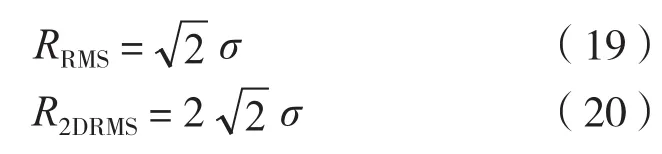
测试试验使用SPIRENT公司的GSS9000卫星信号模拟器,动态性能评估场景的轨迹具有如下特点:在水平方向上以V速度做匀速直线运动5 min,然后在T时间内沿直线将速度降为零,速度V、时间T见表1。该运动场景被SJ/T 11420-2010《GPS导航型接收设备通用规范》、SJ/T 11428-2010《GPS接收机OEM板性能要求及测试方法》和SJ/T 11422-2010 《GPS测向型接收设备》所采用,具有典型的代表性。试验时被测接收机数据更新率为1 Hz,有效的测试数据为1 200组,每组数据包含GPGGA,GPRMC等满足IEC 61162-2010格式的原始定位信息,试验后将被测接收机和模拟器输出的原始数据导入动态性能评估工具,完成接收机动态性能的评估。
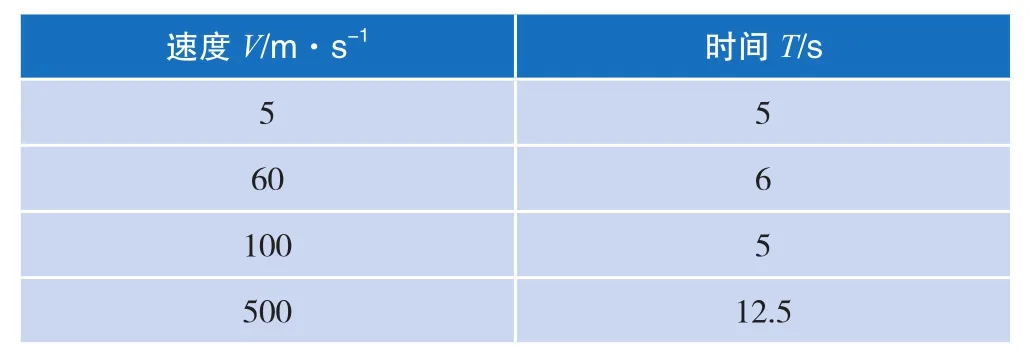
表1 动态轨迹参数
接收机的东向、北向、天向和水平误差变化曲线如图4所示,由于接收机速度的方向为东向,因此北向和天向误差变化很小。另外,由于仿真场景中接收机有三次加速、减速的过程,因此在加速、减速期间接收机的东向误差较大,在接收机动态性能评估时应将其剔除。

图4 定位误差变化曲线
接收机速度和航向实时测试结果及误差变化曲线如图5所示,速度误差值在各个模拟速度值下分布比较均匀,基本落在[-0.1,0.1]区间内;航向误差随速度增加而减小,在5 m/s的过程中航向误差分布在[-1,1]区间内,在60 m/s的过程中航向误差分布在[-0.06,0.06]区间内,在100 m/s和500 m/s的过程中航向误差分布在[-0.02,0.02]区间内,因此评估航向准确度时应在不同速度值下分别进行。
图5 速度、航向误差曲线
根据上述研究结果,接收机的定位准确度、速度准确度和航向准确度的评估结果如表2所示,每组结果包含均值、RMS、2DRMS、CEP(67%)和CEP(95%)五项数据。由于速度误差,航向误差基本符合0均值的正态分布,因此RMS与CEP(67%)和2DRMS与CEP(95%)的关系符合式(10)~(13)。

表2 动态性能评估结果
定位准确度各个参数的概率密度函数如图6所示,由于概率密度函数明显不服从正态分布,因此RMS、2DRMS、CEP的计算结果不满足式(10)~(13)和式(17)~(20)的关系。
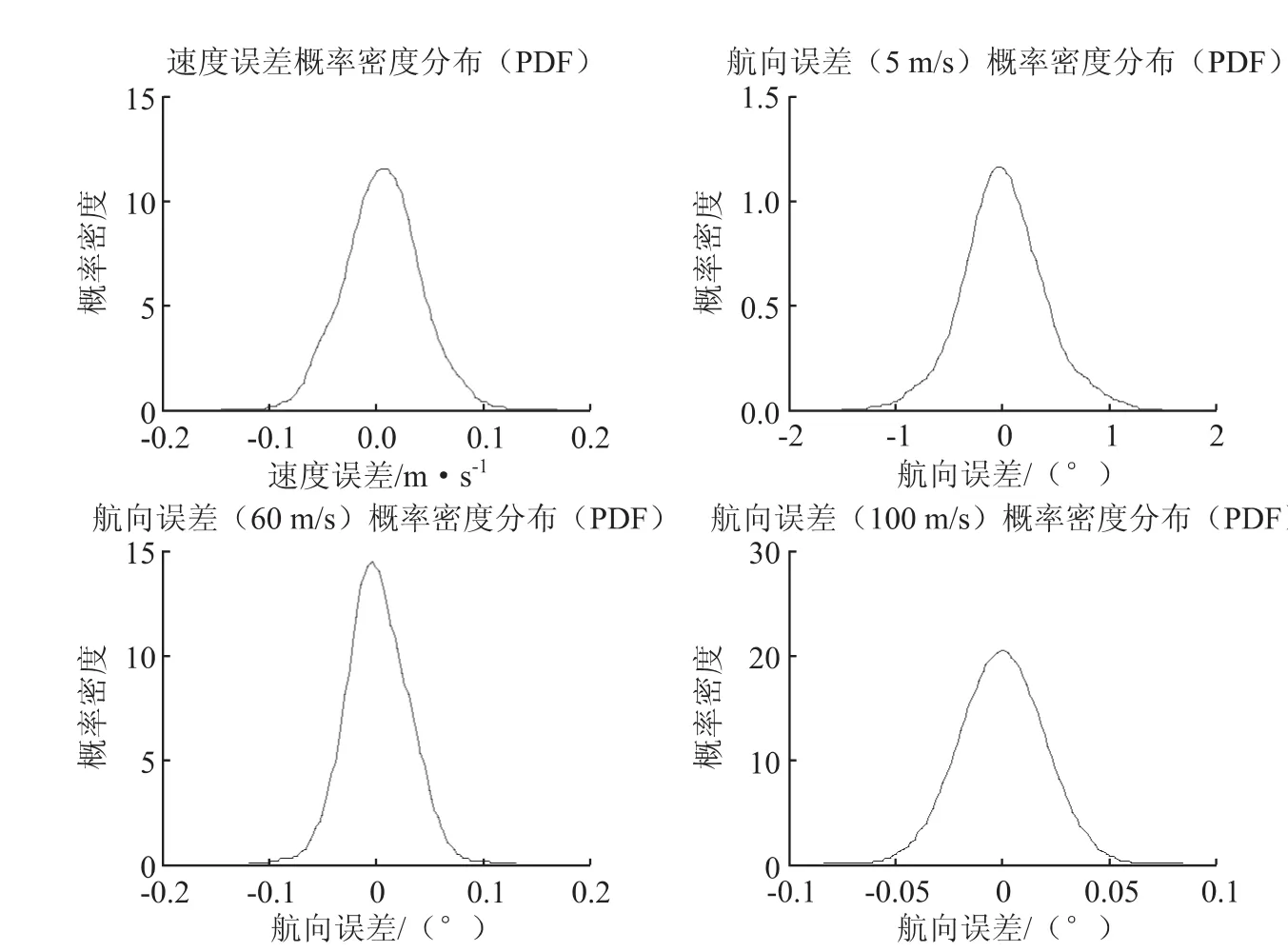
图6 定位误差概率密度
3 结语
本文对卫星导航接收机动态性能中的动态定位准确度、测速准确度和测向准确度评估方法进行了研究,并开发了动态性能评估工具。该工具能够利用单次测试的原始数据对卫星导航接收机上述三个指标进行全面的统计分析。统计分析结果包含均值,RMS、2DRMS、CEP等多种形式的评估结果。动态性能评估工具还能提供定位、测速和航向误差的实时变化曲线及定位误差概率密度曲线,能够快速、有效地完成对卫星导航接收机动态性能的评估。
[1] 胥婕,马志超,胡立志,等.北斗芯片现状与检测规范研究[C].第六届中国卫星导航学术年会论文集—S06北斗/GNSS测试评估技术.西安:中国卫星导航系统管理办公室学术交流中心,2015:1256-1260.
[2] 刘婧.GNSS接收机测试与评估方法研究[D].辽宁工程技术大学,2013.
[3] 刘志国.卫星导航信号模拟器研究与实现[D].中北大学,2014.
[4] 中国电子技术标准化研究所.SJ/T 11420-2010 GPS导航型接收设备通用规范[S].北京:中国标准出版社,2010.
[5] 谢钢.全球导航卫星系统原理GPS、格洛纳斯和伽利略系统,2版[M].北京:电子工业出版社,2013.
[6] 国际电工委员会.IEC61162-1-2010 Maritime navigation and radiocommunication equipment and systems-Digitalinterfaces-Part 1: Single talker and multiple listeners[s].Switzerland, 2010.
Evaluation methods of dynamic performance of GNSS receivers
Ma Zhichao, Lu Jin, Dai Dan, Hu Lizhi,Sang Yu, Xu Jie
(Shanghai Institute of Measurement and Testing Technology)
According to application fields of GNSS receivers,measurement methods and an evaluation tool have been developed to make a comprehensive calibration of GNSS receiver.By utilizing GNSS simulator, accuracy of dynamic positioning, speed and course could be calibrated.Statistics evaluation results of above-mentioned three accuracy indexes could be outputted after finishing a single test, which include multi parameters such as mean value, variance, circular error probable and so on.The research results show that the evaluation methods and tool are able to make the calibration of GNSS receivers in fast and effective ways.
GNSS receiver; GNSS simulator; dynamic positioning accuracy; speed accuracy; course accuracy; statistics evaluation
