基于超声波定位的舞台自动追光灯设计
2016-09-12谢之光吕东航
王 君,谢之光,吕东航,候 刚
(吉林大学 仪器科学与电气工程学院,吉林 长春 130021)
基于超声波定位的舞台自动追光灯设计
王 君,谢之光,吕东航,候 刚
(吉林大学 仪器科学与电气工程学院,吉林 长春 130021)
由于舞台灯光发热量大,人工控制灯光跟踪舞台演员不可能一个人长时间完成,而且灯光耀眼,给操作者带来很大难度,因此急需一种可以自动控制跟踪演员的设备。基于此,本文介绍了超声波定位原理,然后提出了一种基于STM32单片机并结合无线通讯技术和超声波技术的舞台自动追光灯系统设计。本超声波定位系统不只局限于舞台追踪,还可以扩大范围,应用到其他工程现场。如:用于矿坑里的工人定位,可以避免工人的误操作走入不安全的区域,也可在发生矿难时,及时赶到旷工遇难现场拯救旷工生命。
舞台追光;STM32单片机;无线通讯技术;超声波定位技术
追光灯的运用是舞台艺术中不可或缺的重要手段,达到突出重点、塑造人物形象、烘托环境气氛的目的。本文提出舞台灯光随动系统的方案设想及实现的方式。该系统的实现很好地完成灯光随动功能,降低演出成本,节省人力、物力,完善舞台灯光技术中追光灯的功能和自动化控制的程度。
1 超声波定位原理
本系统利用3个固定在空中的超声波节点,来实现对一个在三维直角坐标系中的移动节点的定位,总体空间分布图[1]如图1所示。
图1中,1号节点为移动超声波发射节点,即所需要定位的节点,2、3、4号节点为固定超声波接收节点,由于受到超声波的发射角的限制,所以将系统设计成空间结构,从而可以保证1号节点在三维平面内运动时可以使2、3、4号节点收到发射的超声波,且假定各超声波接收模块的高度均为H,2号节点与3号节点、3号节点与4号节点都为L。
本文选用声波传播时间测量法来实现测距[2]。为了消除接收信号中回波的影响,本文利用声速相对光速慢的特点,设计出了一种新的声波传播时间测量法:将超声波发射传感器与射频发射模块置于A端,而将超声波的接收传感器与射频的接收传感器置于B端,先从A端发射射频信号,告之B端发射超声波,由于电磁波的传播速度比声速大得多,所以可以忽略射频的传播时间,从A端发射射频开始计时,到B端收到超声波信号为止,记录这段时间,则可以用式s=vt来计算A端与B端的距离(其中v为声速,因为本系统测试时温度基本恒定在25℃,所以声速可取恒定值346.575 m/s),利用这种方法,可以分别得到系统空间分布图中的移动节点到3个固定节点的距离a、b、c,以此可在空间直角坐标系中建立3个球面方程[3]。

图1 系统空间分布图Fig.1 The spatial distribution map of the system
即:
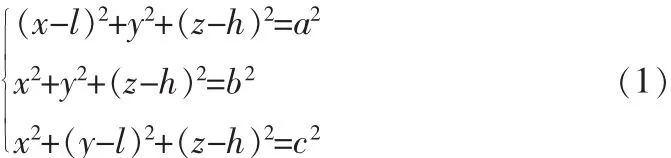
联立方程可解得1号节点的空间坐标(x0,y0,z0):
2 系统硬件设计
本系统由携带机系统和主系统两部分构成[4-5],携带机系统由舞台演员携带,定时发送无线电信号和超声波信号。主系统实时接收无线电信号和超声波信号,并经过数学模型的计算得到携带机的空间坐标,从而调整灯光的照射方向,对演员进行实时追光。
2.1 携带机系统
携带机系统以STC89C52单片机为控制核心,并由NRF905无线芯片、超声波发射电路以及独立电源组成。携带机系统框图如图2所示。

图2 携带机系统框图Fig.2 The block diagram of carrying machine system
2.1.1 STC89C52微控制器
本设计的微控制器采用的是 STC89C52,STC89C52是STC公司生产的一种高性能CMOS8位微控制器,它具有结构简单、功耗低、易于开发等优点,且支持在线系统编程、无需编程器、方便系统的开发和维护。系统工作时,STC89C52定时给NRF905无线模块和超声波发射模块触发信号使其发射无线电信号和超声波信号。
2.1.2 NRF905无线模块
NRF905无线芯片是有挪威NORDIC公司出品的低于1 GHz无线数传芯片,主要工作于433MHz、868MHz和915MHz 的ISM频段。芯片内置频率合成器、功率放大器、晶体振荡器和调制器等功能模块,输出功率和通信频道可通过程序进行配置。非常适合于低功耗、低成本的系统设计。
2.1.3 超声波发射电路
超声波发射电路如图3所示,驱动电压是3~5 V,其主要特点是采用变压器升压,加在发射头上的电压峰-峰值约 60 ~80 V,使得发射功率大大增加,这样一方面为增加距离提供可能,另一方面为提高精度打下基础,因为信号强,使得回波检测更加可靠。图中C8、C9为微调负载电容,为了达到谐振。P1、R4、R5为余波抑制电路,因为利用了变压器和发射头的谐振,好处是能得到近似正弦波。但附带的问题是:在驱动信号停止后,由于谐振的原因,发射头还会持续较长时间发射,直至能量在变压器的次级线包直流电阻上消耗完,这样就导致在近距离测量时,回波都到了,余波还未结束,导致测量失败。所以设计了一个余波抑制电路,将变压器初级构成回路,利用初级较小的电阻快速消耗掉次级的能量。R3是为了可靠而设计的,因为模块是通过插头连接的,难免有加上了电压却没有加驱动信号的情况,此时将有可能导致MOS管导通。

图3 超声波发射电路Fig.3 The ultrasonic transmitting circuit
2.2 主系统
主系统以STM32单片机为控制核心,并由NRF905无线芯片、超声波接收电路、二自由度的舵机系统以及光源组成。主系统框图如图4所示。

图4 主系统框图Fig.4 The block diagram of the main system
2.2.1 STM32微控制器
STM32系列基于专为要求高性能、低成本、低功耗的嵌入式应用专门设计的ARM?Cortex-M3内核。按性能分成两个不同的系列:STM32F103“增强型”系列和STM32F101“基本型”系列。本系统采用增强型系列,增强型系列时钟频率达到72 MHz,是同类产品中性能最高的产品;STM32功耗36 mA,是32位市场上功耗最低的产品,相当于0.5 mA/MHz。系统工作时,STM32单片机实时接收无线电信号和超声波信号,快速的获取目标的空间坐标并及时的调整灯光的照射方向。
2.2.2 超声波接收电路
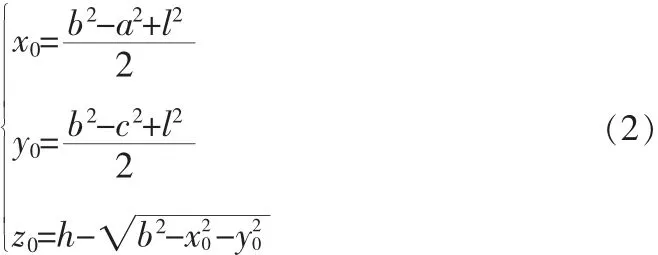
图5为超声波接收电路的核心部分,由专用超声波接收集成电路TL852构成的超声波信号检测电路。这是按照TL852手册上的推荐电路设计的,参数是针对40 kHz频率的。这部分完成了回波的放大和检出。其主要特色是选频和变增益,此外是灵敏度改变比较容易。
图6为超声波接收电路的输出信号提取部分:由低电压运放LMV358组成,因为考虑要和3 V供电的MCU配合,所以选用了支持满幅输出的LMV358。电路为两部分,前面是一级跟随器,为了提高输入阻抗,减小对TL852输出电容积分的影响。第二级是比较器,为了输出下降沿较好的信号给MCU。
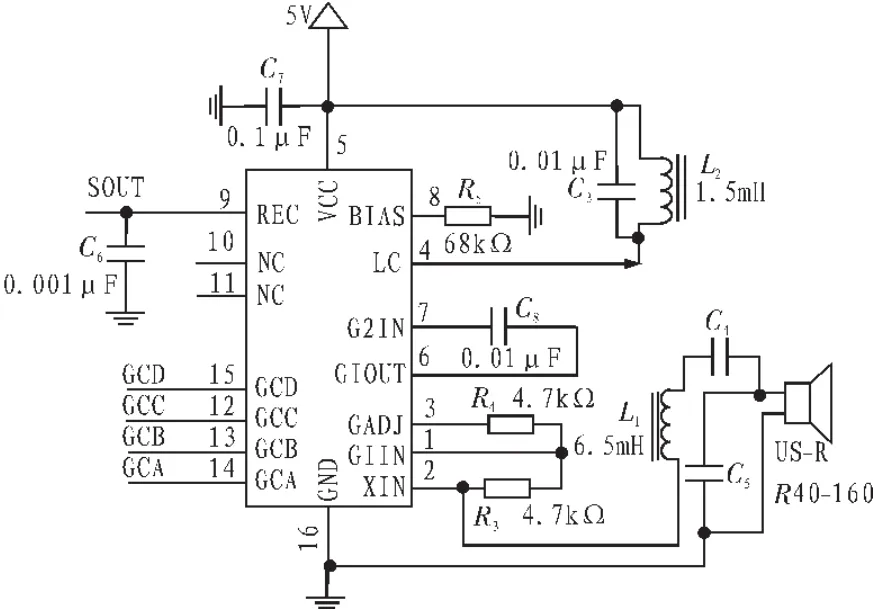
图5 超声波接收电路Fig.5 The ultrasonic receiving circuit
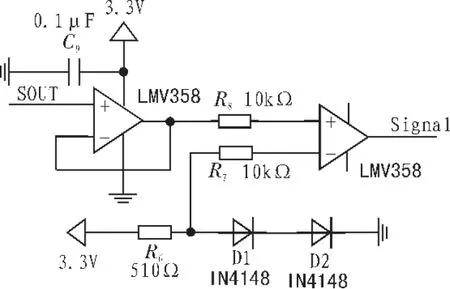
图6 超声波接收电路的信号提取部分电路Fig.6 The signal extraction circuit of the ultrasonic receiving circuit
3 系统软件设计
本系统软件设计也由携带机系统软件和主系统软件两部分组成,携带机系统软件设计主要分为两个模块:NRF905模块、超声波发射模块。其中NRF905模块用于发射无线电波信号,超声波发射模块用于发射超声波信号。携带机系统软件设计流程图如图7所示。上电复位后,初始化NRF905,单片机每隔50 ms同时向:NRF905模块和超声波发射模块发送触发信号使其发射无线电信号和超声波信号。主系统软件设计主要分为3个模块:NRF905模块、三路超声波接收模块以及二自由度舵机系统。其中NRF905模块用于接收无线电波信号,三路超声波接收模块用于接收超声波信号,二自由度电机用于控制灯光的照射方向。主系统系统软件设计流程图如图8所示。上电复位后,初始化NRF905并禁止超声波接收模块接收超声波信号。当NRF905接收到无线电信号后产生中断,单片机开始计时。当某一路超声波接收模块接收到超声波信号后产生中断,单片机在中断中计算出改路超声波接收节点到移动节点的距离。三路都接收到超声波信号后可以由超声波定位原理得到携带机的空间坐标[6-7],然后单片机控制二自由度的舵机调整光源的照射方向。
4 结 论
本系统以stm32单片机作为主控芯片机并结合无线通讯技术和超声波技术设计的舞台自动追光灯系统设计成功地解决人工控制灯光跟踪舞台演员的问题。经过测试[8],在所选实验条件下,超声波传感器的发射距离超过1 000 cm,基本可以实现在800.0 cm*800.0 cm的舞台中使用,另外也适合于各种需要自动追踪灯光的工作。
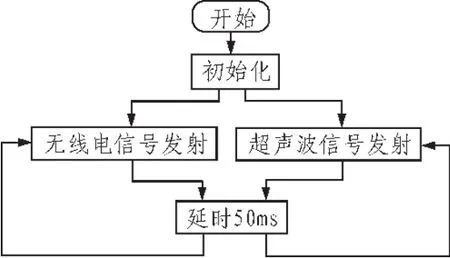
图7 携带机软件设计流程图Fig.7 The flow chart of software design of main system

图8 主系统软件设计流程图Fig.8 The flow chart of software design of carrying machine system
[1]王富东.超声波定位系统的原理与应用[J].自动化与仪表,1998,13(3):43-77.
[2]雷鸣雳,周功道,冯祖仁.基于伪码相关技术的超声波无线电定位系统[J].微电子学与计算机,2004,21(3):18-55.
[3]杨敏华,李利军,李朝晖.超声波三维空间定位在虚拟现实系统中的应用[J].计算机仿真,2004,21(11):36-48.
[4]阮一晖.基于超声波定位技术的障碍探测系统[J].苏州大学,2007,16(4):18-23.
[5]寇海洲.基于超声波的定位系统研究与实现[D].数据通信,2008.
[6]卜英勇,王纪婵,赵海鸣,等.基于单片机的高精度超声波测距系统[J].仪表技术与传感器,2007(3):66-68.
[7]寇海洲,庄毅.无线传感器网络超声波定位算法的研究[J].航空计算技术,2008,38(4):125-128.
[8]郑静,华泽钊,徐根林,等.室内超声波定位系统的构建与测试[J].上海理工大学学报,2007,29(6):553-561.
Stage chasing light design based on ultrasonic positioning
WANG Jun,XIE Zhi-guang,LV Dong-hang,HOU Gang
(College of Instrument Science and Electrical Engineering,Jilin University,Changchun 130021,China)
Due to a lot of heat of the stage lighting,one person cannot control the light to track the actor for a long time and bright lights bring great difficulty to the operator,so a device which can be controlled to track the actor automatically is urgently needed.Based on this,the paper describes the ultrasonic positioning principle,and then propose a stage chasing light system design based on STM32 microcontroller combined with wireless communication technology and ultrasonic technology.This ultrasonic positioning system is not limited to the stage tracking,and it can also be expanded to the scope of application to other project site.For example:it can be used for mine workers positioning to avoid the workers enter into unsafe areas for a mistake,and in the event of a mine,it can help rushing to the scene to save the victims of absenteeism life.
stage cha microcontroller;wireless communication technology;ultrasonic positioning technology
TN912.2
A
1674-6236(2016)04-0004-03
2015-04-02 稿件编号:201504020
国家级大学生创新实验计划基金项目(2014A65292)
王 君(1955—),男,山东乳山人,教授。研究方向:传感器技术及应用。
