RFID定位技术在虚拟装配中的应用
2016-09-12ApplicationofRFIDpositioningtechnologyinvirtualassembly
Application of RFID positioning technology in virtual assembly
郭桓宇,侯悦民,李 康GUO Huan-yu, HOU Yue-min, LI Kang(北京信息科技大学 机电工程学院,北京 100192)
RFID定位技术在虚拟装配中的应用
Application of RFID positioning technology in virtual assembly
郭桓宇,侯悦民,李 康
GUO Huan-yu, HOU Yue-min, LI Kang
(北京信息科技大学 机电工程学院,北京 100192)
旨在运用RFID技术来辅助零部件装配,实现一种在可视化界面实时显示装配过程的技术,因此需要获取到零部件之间的相对位置关系。在分析现有RFID定位算法的基础上,用遗传算法优化BP神经网络的权值和阈值,再结合现有的RFID定位算法来实现零部件的相对位置估计。实验结果表明,零件定位精度较高,此定位方法可以应用于虚拟装配。
虚拟装配;遗传算法;BP神经网络;射频识别
0 引言
随着“中国制造2025”计划的提出,智能制造逐渐成为业界关注的热点。RFID技术凭借其强大的感知、识别、联网、定位等功能已经广泛应用于智能制造[1]。制造业的快速发展使得消费者的需求也在不断变化,因此在产品的设计、建模过程中须考虑用户的想法,针对这种情况,本文提出一种基于RFID技术的虚拟现实交互装配的方法,通过用RFID标签获取各零部件的相对位置关系,再与零部件的三维模型进行信息匹配,从而实现一种可视化虚拟装配过程,用户可以与企业技术人员及时沟通。本文主要针对RFID技术获取零部件的相对位置关系进行分析。
1 RFID定位技术
RFID是一种无线通信技术,通过射频信号来识别特定目标并读取相关信息,实现一种无接触式的自动识别技术。RFID系统由阅读器、应答器(标签)、应用软件系统三部分组成。当标签进入读写器的磁场范围后,标签接收读写器发出的射频信号,并根据接收到的射频信号发送出与之相匹配的标签信息,读写器读取标签信息并解码后,进一步通过应用软件系统进行数据处理,从而实现对标签的自动识别[2]。
经查阅文献[3]可知基于RFID技术的主要定位算法如图1所示。

图1 RFID定位方法分类
文献[4]对DV-Hop定位方法进行了研究,该方法无需进行测距,仅通过网络拓扑结构的计算来获取距离。但DV-Hop算法要求节点分布均匀、密集。当节点移动距离较小时,跳数信息变化不明显,导致定位误差较大,而且其网络结构复杂,通信、计算开销较大。文献[5]为避免因读写器读取标签失败而导致TOA定位算法失效,运用改进的Monte Carlo算法对RFID标签进行跟踪。该算法要求标签与读写器的天线极化方向保持一致,如果天线出现极化失配现象时,定位误差较大。文献[6]考虑到标签RSSI值与距离的关系成非线性关系,通过比较Lagrange插值和Newton插值方法,采用牛顿插值法对参考标签的RSSI值进行计算,然后运用传统的VIRE算法进行定位。文献[7]在分析TDOA与AOA定位方法的基础之上,提出将RBF神经网络运用于TDOA/ AOA混合定位的方法,先通过模拟退火遗传算法对RBF网络的参数和拓扑结构进行优化,再将训练后的网络应用在TDOA/AOA上,仿真结果表明此方法具有较高的定位精度。而且解决了传统算法在NLOS环境中的定位精度差的问题。文献[8]首先通过RFID定位系统读取待测物体携带标签的信号强度值,然后运用BP神经网络对所得到的信号数据进行训练,最后通过实验验证了其定位效果。文献[9]先采用连续蚁群算法优化BP神经网络,再对RFID原始的RSSI值进行训练。文献[10]用卡尔曼滤波算法对接收到的信号强度值进行滤波处理,再经定位算法来估算目标的位置信息,信号强度值经过滤波后的准确性明显提高,这种定位方法避免了额外开销与传统定位方法的局限性。文献[11]分析并比较了chan算法、LS算法、Taylor算法,并提出一种在非视距环境下的动态定位算法,通过测量多组TDOA值,再用BP神经网络对TDOA值进行修正,以消除NLOS导致的误差。最后用chan算法对目标进行位置估计。通过BP神经网络对TDOA值修正后,有效地抑制了NLOS误差,而且定位精度明显提高。文献[12]采用BP神经网络训练RSSI值的方法对目标物体进行定位,并对盲点区域的坐标值用泰勒级数展开的方法进行拟合,该方法避免了对信号传播模型中参数的拟合,而且定位精度有明显提升。文献[13]先通过高斯滤波算法将初始数据(RSSI)预处理,排除噪声干扰和异常数据等,再采用模糊神经网络训练RSSI值的方法对目标物体进行定位,该方法同时适用于静态定位和动态定位。文献[14]将反馈机制引入到信号传播模型中,根据环境的变化自动调整路径损耗系数。文献[15]分析了粒子滤波算法和用PSO优化PSOPF的算法,由于粒子滤波的采样个数不变,故无法适应状态空间随时间的变化,而优化的PSOPF算法虽然解决了上述问题,但无法体现数据进化的特点,而且欠考虑优化均衡问题。为了解决RFID初始数据的不确定性问题,作者提出一种不确定性度量方法(AMUR),从而改善粒子退化和贫化问题,提升了位置估计精度。文献[16]考虑到多径反射效应的干扰,一改传统的基于信号传播损耗模型的测距方法,而是采用RSSI指纹库的测距方法,然后对BP神经网络和朴素贝叶斯定位模型进行了比较,最后用BP神经网络对RSSI值进行训练来获取目标位置信息。
通过分析上述文献可知,只有在一些定位场景较大而且对定位精度要求不是很高的情况才采用非测距的定位方法。在基于测距的定位方法中,由于基于TDOA很难保证各阅读器同步、基于TOA因NLOS的干扰导致测量值误差较大,而基于RSSI值的定位方法简单且成本低。故多数文献采用了基于RSSI测量值的方法。
通过比较上述文献采用的定位方法,考虑到定位方法的精度、成本、便携性,本文最终采用基于RSSI测量值的方法进行实验,再在MATLAB中通过BP神经网络训练并验证其可行性。为去除环境干扰和异常信号等,采用卡尔曼滤波方法对原始数据进行滤波处理。为避免BP神经网络陷入局部最小,采用传统的遗传算法对网络的权值和阈值进行优化。最后将处理后的数据作为BP神经网络的训练输入值。
2 RFID定位算法模型
2.1实验布局
将参考标签的位置坐标(x, y)T按照标签序号记录,参考标签及天线的分布示意图如图2所示。

图2 天线及参考元件位置图
2.2BP神经网络模型
根据参考标签的RSSI值与对应坐标之间的关系,确定BP神经网络的输入层为四个天线读取的RSSI值(p1,p2,p3,p4)T,输出层为对应参考标签的实际坐标(x,y)T以及对角线天线之间的距离z,故输出层为(x, y, z)T,隐含层节点数计算公式为:n=a+(n0+n1)/2[17],其中a为1~10之间的常数,n0为输入层节点数,n1为输出层节点数,所以隐含层的节点就确定为4~13,对不同的网络节点数进行多次测试后,当节点数为12时的预测精度最高而且收敛速度相对较快。因此本次实验模型的隐含层节点数为:n=12。综上,BP神经网络模型采用4:12:3的网络结构。网络函数及参数设置的一般过程与现有BP神经网络有关文献的设置方法类似,本文不再赘述。神经网络结构如图3所示。

图3 前馈神经网络结构
3 遗传算法优化BP网络流程
当BP神经网络的结构确定以后,首先初始化网络的权值和阈值。遗传算法个体长度由BP神经网络结构的输入输出参数个数决定,进而确定遗传算法个体的长度。个体通过适应度函数计算个体适应度值,然后通过遗传算法的一般流程操作寻找到最优适应度值对应个体。再根据最优个体对BP网络的权值和阈值进行赋值,网络训练完再根据预测函数输出。算法流程如图4所示。

图4 算法流程
4 实验分析及结论
经遗传算法优化,最优个体适应度值变化如图5所示。

图5 最优个体适应度值

图6 GA优化BP神经网络预测误差
把最优的权值和阈值赋给神经网络,用处理后的RSSI数据训练多次预测非线性函数输出,预测误差如图6所示,从图中可以看出,遗传算法优化的BP神经网络的预测误差得到了很大改善,因此基于遗传算法优化BP神经网络的方法控制有效,测试数据的实际坐标位置及零件之间相互位置关系如图7所示,定位效果比较理想,基本符合实际情况。从图8可知,迭代进行到6次的时候,误差达最小值,当迭代到12次时,误差达到稳定值而结束。实验结果(图9)表明,基于BP神经网络的RFID标签坐标位置训练精度达到98.03%,预测精度为95.22%。综上实验及仿真结果可知,通过卡尔曼滤波处理原始数据以及遗传算法优化BP网络的权值和阈值使得定位效果良好,系统的定位性能较高,可以对虚拟现实交互装配进行下一步研究。

图7 测试零件与实际坐标对比
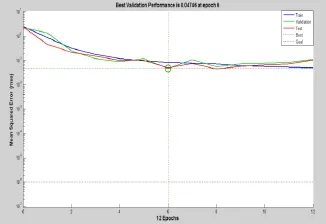
图8 仿真结果

图9 训练结果与测试结果分布图
[1] 尹周平,陶波.智能制造与R F I D技术[J].航空制造技术,2014,03:32-35.
[2] 吴欢欢,周建平,许燕,李润萍.RFID发展及其应用综述[J].计算机应用与软件,2013,12:203-206.
[3] 吴超,张磊,张琨.基于BP神经网络的RFID室内定位算法研究[J].计算机仿真,2015,07:323-326.
[4] 林惠强,周佩娇,刘才兴,徐东风.改进DV-Hop定位算法在动物监测中的应用[J].农业工程学报,2009,09:192-196.
[5] 林敏,鲍煦,王刚.改进Monte Carlo算法用于RFID标签的室内定位[J].微计算机信息,2008,14:203-204,275.
[6] 陈家琪,严梓乘.一种Newton插值的RFID室内定位改进算法[J].计算机系统应用,2012,01:45-48.
[7] 张宝军,卢光跃.基于SA-GA算法RBF神经网络的TDOA/AOA定位算法[J].西北大学学报(自然科学版),2009,04:575-578.
[8] 徐平,沙从术,赵芳杰.BP神经网络在射频识别定位系统中的应用研究[J].电子技术应用,2016,02:64-67.
[9] 王晨,陈增强.基于连续蚁群算法融合的神经网络RFID信号分布模型[J].东南大学学报(自然科学版),2013,S1:210-214.
[10] 曹春萍,罗玲莉.基于卡尔曼滤波算法的室内无线定位系统[J].计算机系统应用,2011,11:76-79.
[11] 毛永毅,周康磊.基于BP神经网络的定位跟踪算法[J].计算机工程与应用,2011,20:238-240.
[12] 张会清,石晓伟,邓贵华,高学金,任明荣.基于BP神经网络和泰勒级数的室内定位算法研究[J].电子学报,2012,09:1876-1879.
[13] 陈增强,国峰,张青.基于模糊神经网络建模的RFID室内定位算法[J].系统科学与数学,2014,12:1438-1450.
[14] 贾若,张琨,张磊.自适应RFID室内定位算法研究[J].计算机仿真,2014,09:33-37.
[15] 王永利,钱江波,孙淑荣,张功萱,刘冬梅.AMUR:一种RFID数据不确定性的自适应度量算法[J].电子学报,2011,03:579-584.
[16] 汪凯雷,张靖暹,李翔,王华昌,李建军.基于机器学习的RFID定位技术在模具行业的应用研究[J].模具工业,2014,04:11-14.
[17] 刘雪,李亚妹,刘娇,钟蒙蒙,陈余,李兴民.基于BP神经网络的鲜鸡蛋货架期预测模型[J].农业机械学报,2015,10:328-334.
TP391.9
B
1009-0134(2016)08-0073-04
2016-05-15
国家自然科学基金资助项目(51175284);北京市教委科研基金资助项(SQKM201211232002)
郭桓宇(1990 -),男,山西朔州人,硕士研究生,研究方向为动力学分析及仿真研究。
