海洋铺管电驱张紧器履带机构及传动效率分析
2016-09-05周军峰王福山马天亮
周军峰,王福山,马天亮,曹 为
(1.天津市精研工程机械传动有限公司,天津 300409;2.天津工程机械研究院,天津 300409;3.海洋石油工程股份有限公司,天津 300450)
海洋铺管电驱张紧器履带机构及传动效率分析
周军峰1,王福山2,马天亮1,曹为3
(1.天津市精研工程机械传动有限公司,天津 300409;2.天津工程机械研究院,天津 300409;3.海洋石油工程股份有限公司,天津 300450)
张紧器在海洋铺管作业中起到重要作用。以脐带缆安装系统及关键部件(张紧器)为研究对象,主要研究了履带装置的驱动系统、履带悬浮机构和接触垫块,给出了接触垫块应具备的4方面特性。分析了影响张紧器履带装置传动效率的因素,对履带传动效率进行试验数据对比研究,为张紧器的优化设计提供理论基础。
铺管船;张紧器;传动装置;效率
在深水油气开发中,海洋铺管作业越来越多,重要性日益突出。铺管张紧器是海洋铺管作业的专业装备,在铺设管线(例如石油管道、脐带缆等)过程中起到重要的作用,是管道铺设系统的核心部分之一。其主要作用是夹持管道,并能在铺设过程中以一定的速度均匀收、放缆线。在铺管船停止时,张紧器还能控制管线张力,使得铺管船在波动或是风浪的作用下,管线的张力能保持在允许值,避免管线超过许用应力而破坏。
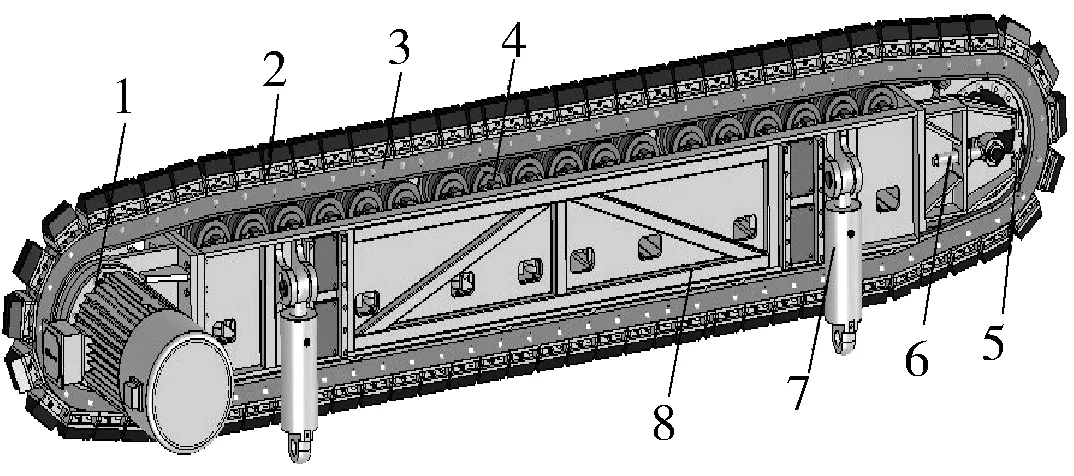
张紧器按传动的履带数量和履带布置形式分为两履带垂直张紧器、两履带水平张紧器、三履带和四履带对称布置张紧器[1]。在同等履带夹持力的情况下,履带数越多,管线在铺设过程中的受力越均匀,不易使管线变形。但是,由于管线整体直径不均,直径小的部位,其夹持力不够,导致铺设张力减小;直径大的部位,管线局部夹紧力增大,对管线有一定的损伤。本文以研制的张力为850 kN的四履带张紧器为研究对象,如图1所示,对其结构和传动效率进行分析。

图1 四履带张紧器
1 张紧器履带机构总成的设计
履带机构总成(如图2所示)是张紧器的核心部件,直接影响张紧器的工作能力。由图2知,驱动总成的电机驱动减速机、链轮,传动链轨及履带。引导轮起导向定位、履带预紧作用,中间履带框架及悬浮装置起支撑作用。履带预紧机构采用螺杆、螺母支撑引导轮,根据链轨预紧力进行人工调整。
1—驱动总成;2—接触垫块;3—链轨;4—履带悬浮机构;5—引导轮总成;6—履带预紧机构;7—夹紧液压缸; 8—履带框架。
张紧器的链轨采用推土机行走系统的链轨,根据经验,链轨的断裂拉力应是履带最大牵引力的2~3倍[2]。
张紧器额定张力为850 kN,考虑链轨的安全系数为1.5倍,选取的链轨的允许拉力应大于318.75 kN。参考表1所示,选节距为215.9 mm的链轨。

表1 链轨参数
1.1主要参数计算
张紧器最大铺设速度v=20 m/min,驱动链轮齿数为Z=25,其分度圆直径为D=868.55 mm,张紧器每条链轨提供拉力为F=212.5 kN。根据上述参数计算出张紧器每条履带的驱动转矩和驱动功率。
计算驱动转矩T:
计算驱动功率P:
式中:n为机械效率,取0.8。
1.2履带悬浮机构
履带悬浮机构是指液压缸作用支重轮支撑履带,在蓄能器和控制系统的作用下保持液压缸推力恒定,缓和因管线直径误差变化时产生的压力波动,保持管线始终承受均衡的压力。结构如图3。
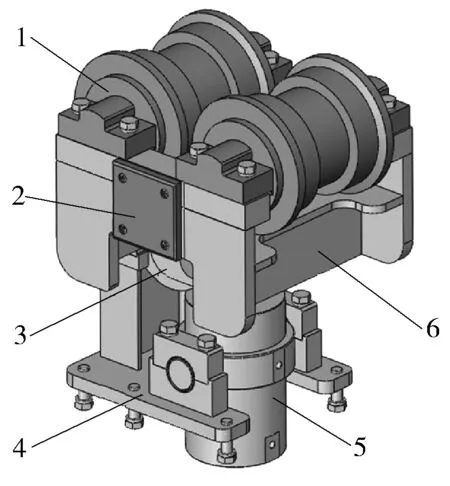
1—滚轮;2—导向滑板;3—摇臂;4—摇臂支撑座;5—液压缸;6—滚轮支座。
履带悬浮机构采用液压缸顶升的方式,液压缸只提供支撑力,并与摇臂组成三角结构而支撑滚轮,滚轮支座、液压缸与摇臂为一点支撑,滚轮支座可绕连接轴旋转,根据管线直径的变化而变化,实现接触力的均衡。
1.3接触垫块
接触垫块直接与管线接触,其作用是将履带上的压紧力均匀分布在管线上,能够产生较大的摩擦阻力,以夹持管线或拖动管线,避免管线表面保护层的机械损伤。结构如图4。

1—接触垫块;2—垫块座;3—连接轴。
接触垫块应具备以下特性:
1)高强度。张紧器处于工作状态时,每块接触垫块承受61.6 kN工作压力,且接触垫块与管道处于相对运动状态,这就要求接触垫块具有高的抗压与抗剪切强度。
2)高摩擦因数。由于海洋敷管船随时经受着风、浪、潮的作用,其上下、左右的不规则震荡会造成管道与接触垫块的不规则、不均匀受力。因此,接触垫块与管道表面应具有高的摩擦因数,是保证张紧器有效工作及安全施工的关键。如果摩擦因数不足或变化较大,一旦造成管道滑脱并引发生产安全事故,其经济损失是难以估量的。
3)适当的硬度。由于接触垫块与管道直接接触,且两者处于相对运动状态。接触垫块硬度过大,会对管道及其保护层产生硬压伤或划伤,甚至造成管道破损。硬度过小,设备运行中接触垫块的磨损量就会增大,从而导致接触垫块使用寿命缩短,增加使用成本,频繁更换接触垫块还会影响施工进度,降低生产效率。
4)恰当的塑性变形能力和弹性。恰当的塑性变形能力和弹性是防止接触垫块发生脆性破坏以及塑性变形后恢复原状的基础。塑性变形能力太差,接触垫块很容易在突然受力或应力分布不均匀时发生脆性破裂,危及张紧器运行安全。弹性太小,一旦接触垫块发生受力变形,它将无法恢复其原状,从而影响接触垫块与管道的接触吻合度,进而降低张紧器的工作效率。塑性变形能力及弹性太强,张紧器施加到接触垫块上的压力很容易通过塑性形变而损失,或产生较大的波动,从而降低接触垫块对管道的夹紧力,容易造成管道滑脱。
接触垫块采用橡胶-塑料-矿物填料复合型材料,与管线接触面积为170 mm×70 mm,表面邵氏硬度92~95 HA。最大正压力5.18 MPa时,最小静摩擦因数为0.153。
2 张紧器驱动系统传动效率试验研究
张紧器驱动系统是把电机的输出转矩传到驱动轮上,转变为管线的驱动力,同时把电机的输出转速转变为管线的移动速度。另外,履带机构总成还要支撑管线的重力,对管线产生夹紧压力。
2.1驱动系统运动学分析
张紧器工作时,履带对管线接触段产生的反作用力推动管线运动。履带由若干个具有一定长度的接触垫块和链轨组成,当其在水平方向等速直线运动时,若管线与接触垫块板没有相对滑动时,则张紧器的运动速度为理论速度。履带上相应位置上的相对运动速度vx的大小为:
vx=rkωk=r1ω1=r2ω2
式中 :ωk、ω1、ω2分别是驱动链轮、引导轮和支重轮的角速度;rk、r1、r2分别是驱动链轮节圆半径、引导轮、支重轮的滚动半径。
当张紧器与管线没有相对滑动运动时,履带上任何一点的牵连运动都与该点的相对运动速度大小相等。其理论行驶速度vT可以表示为:
vT=kkωk
然而,由于履带是由链轨和接触垫块组合而成的,因此其速度具有波动性,驱动链轮的节圆半径rk可表示为:
式中:Zk为围绕驱动链轮的一周接触垫块数目;lk为接触垫块节距。
2.2驱动系统运动阻力分析
履带运动阻力F0由履带机构总成运动时各构件的内部摩擦力F1和使接触垫板变形时消耗的力F2两部分构成。
2.2.1履带机构总成的内部摩擦阻力F1[3]
履带机构总成的内部摩擦阻力主要是由四轮一带的摩擦力构成。假设t为链轨节距,则链轨紧边缠绕过驱动轮1圈时,链轨销子与销子套之间的摩擦阻力F1J可表示为:
同时,该摩擦力还出现在其他3处卷绕履带处,此时其链轨之间的拉力为松边拉力,可以表示为:
式中:FJ为链轨紧边拉力;μ1为链轨销与销套之间的摩擦因数;d1为链轨销子直径;FS为链轨松边拉力,FS≈(0.1~0.5)FJ。
综上所述,当行走系统前进时,链轨间的内部摩擦阻力为:
支重轮的摩擦阻力由支重轮与链轨接触滚动产生的摩擦阻力和支重轮与轮轴间的摩擦阻力两部分构成。摩擦阻力为:
式中:Q为支重轮上的作用力;D2为支重轮外径;d2为支重轮轴半径;f为支重轮与链轨间滚动阻力系数;μ2为支重轮与轮轴间的摩擦因数。
驱动轮与轮轴处的摩擦阻力:
式中:D3为驱动轮节圆直径;d3为驱动轮轴径;μ3为驱动轮轴径与轴承间的摩擦因数。
综上所述,行走系统前进时,履带内部摩擦阻力为:
F1=F11+F12+F13=
2.2.2接触垫板变形阻力F2
接触垫板与管线作用,会引起接触垫板的变形。其变形越大,其阻力也越大,则接触垫板变形阻力为:
F2=pbh
式中:b为接触垫板与管线接触宽度;p为接触垫板对管线的单位面积压力;h为接触垫板沉陷深度。
2.3夹紧力对驱动系统效率影响
驱动系统效率除受到机械设计因素影响外,夹紧力是影响驱动系统运动阻力主要因素,对张紧器张力输出具有极其重要作用。因此,通过试验数据量化夹紧力与驱动系统输出张力的关系,对张紧器进一步优化设计奠定了基础。
管线不受拉力的情况下,通过测量驱动阻力,换算非负载状态下的机械损失效率,从而研究夹紧力对驱动系统效率的影响。图5为外力不变时,不同履带夹紧力与驱动系统机械损失效率试验曲线,可知最大夹紧力时的机械损失效率达到21%,驱动系统机械损失效率随夹紧力的增加呈线性增长。
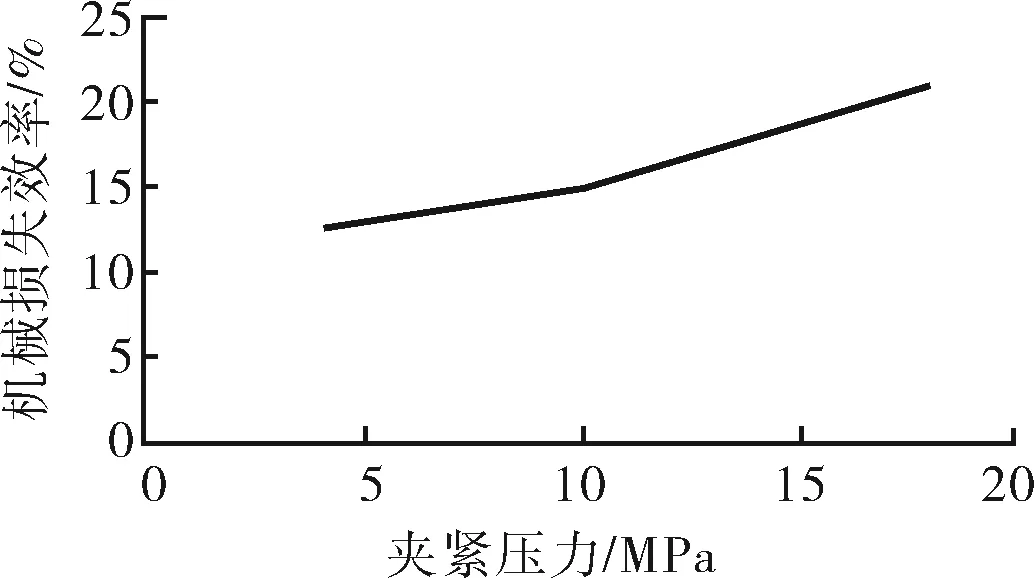
图5 履带夹紧力与驱动系统机械损失试验曲线
3 结论
1)张紧器驱动系统传动效率主要由主驱动系统,链传动系统和接触垫块变形共同影响。
2)设计了履带悬浮结构,在蓄能器和控制系统作用下,保证管线直径变化的情况下,保持管线始终承受均衡的压力。提出了接触垫块设计时应注意的4种特性,通过提高接触垫块特性而减少夹紧力,从而提高传动效率。
3)试验数据表明,除机械传动影响外,可通过设计新型接触垫块而减小管线夹紧力,保证接触垫块适当的硬度下,提高摩擦因数和强度,提高传动效率。
4)当前存在的问题主要在于新型垫块方面设计,应该通过多次试验,进行对比研究,分析其他方面影响。可多运用滚动轴承和润滑系统,减少摩擦因数。
5)今后主要的研究方向为减小机械传动摩擦,增加管线接触摩擦。设计新型接触垫块或新型接触方式为主要研究方向。
[1]王文明,张仕民,徐克彬,等.海洋脐带缆张紧器总体方案设计[J].石油矿场机械,2013,42(5):42-46.
[2]龚计划,邓斌.小型挖掘机履带行走装置参数的合理确定[J].建筑机械化,2010(1) :44-47.
[3]孔德文,赵克利,许宁生,等.液压挖掘机[M].北京:化学工业出版社,2007:54-54.
[4]陈栋.海底铺缆用四履带张紧器设计[J].机械工程与自动化,2014(3) :100-104.
Research on Track Unit and Transmission Efficiency of the Pipe Vessel Electric Driven Tensioner
ZHOU Junfeng1,WANG Fushan2,MA Tianliang1,CAO Wei3
(1.Tianjin Jingyan Construction Machinery Transmission Co.,Ltd.,Tianjin 300409,China;2.Tianjin Research Institute of Construction Machinery,Tianjin 300409,China;3.Offshore Oil Engineering Co.,Ltd.,Tianjin 300450,China)
Subsea oil and gas field development has brilliant application prospect which had brought in remarkable economic efficiency worldwide,while our country is far behind advanced countries and there is a technical gap to be filled.This paper takes umbilical cable assembly system and key component (tensioner) as object of study to respectively discuss tensioner track unit and driving system transmission efficiency.It mainly discusses track unit driving system,track suspension mechanism and contact pad design,The 4 aspects of the contact pad should be given.Through analyzes the reason of tensioner track unit transmission efficiency loss and makes comparative analysis on test data of track transmission efficiency,which provides fundamental basis to tensioner optimization design.
pipe-laying barge;tensioner;transmission device;efficiency
1001-3482(2016)05-0020-04
2015-11-23
国家科技重大专项“脐带缆安装系统关键部件(A&R绞车)研制”(2011ZX05056-003-07);天津市科技计划项目“恒张力控制技术研究与装备产业化”(14ZCDZGX00069)
周军峰(1981-),男,吉林东丰人,高级工程师,硕士研究生,2007年毕业于吉林大学机械设计及理论专业,现从事海洋石油工程装备研制,E-mail:jun81_feng@163.com。
TE952
A
10.3969/j.issn.1001-3482.2016.05.004
