基于九轴MEMS定位系统误差分析与补偿算法研究*
2016-09-02朱勤翔杨晓辉上海交通大学区域光纤通信网与新型光通信系统国家重点实验室上海000国网河南省电力公司电力科学研究院河南郑州45005
张 港,朱勤翔,郭 薇,杨晓辉(.上海交通大学区域光纤通信网与新型光通信系统国家重点实验室,上海000;.国网河南省电力公司电力科学研究院,河南郑州45005)
基于九轴MEMS定位系统误差分析与补偿算法研究*
张港1,朱勤翔1,郭薇1,杨晓辉2
(1.上海交通大学区域光纤通信网与新型光通信系统国家重点实验室,上海201100;2.国网河南省电力公司电力科学研究院,河南郑州450052)
基于九轴MEMS定位系统,对由陀螺仪零偏造成的位移平面偏转误差进行分析与补偿。通过实验与推导,首次给出偏差的定量分析和误差传播的数学模型。为估计偏差,设计了一种新的状态向量中仅包含陀螺仪零偏的、简化扩展卡尔曼滤波(SEKF)技术,克服了无加速度计辅助条件下的偏差估计问题,降低了计算量,能够很好地满足位移实时估计需求。硬件实验证明:经过偏差补偿的九轴MEMS定位系统,能够准确估计有限范围内周期性运动的位移,幅值定位精确度达到90%。该系统可用于无人机、机器人定位等领域。
九轴MEMS定位系统;误差分析;陀螺仪偏差估计;简化扩展卡尔曼滤波器
0 引言
不依赖全球定位系统(GPS)的惯性导航定位是公认的世界难题。一是由于加速度信号本身的直流偏差的存在,经过二次积分之后位移轨迹会迅速发散;二是加速度计容易受扭转干扰,必须去除扭转分量才能对其信号进行积分。Woodman O[1]分析了MEMS加速度计信号二次积分后,位移误差与时间平方呈正比;Foxlin[2]将MEMS应用于行人位置追踪,通过在扩展卡尔曼滤波(EKF)中周期性将速度置零来打破误差随时间积累;邵颖彪等人[3]设计了一种测量导线舞动的九轴MEMS定位系统,考虑了扭转运动对加速度信号造成的影响(舞动中通常同时包含平动和扭转运动),由于舞动中真实平动加速度信号具有周期性,其直流偏差可以通过滤波予以消除,从而避免轨迹快速发散。
本文基于九轴MEMS系统,研究有限空间内的周期性运动的定位追踪,重点考察陀螺仪零偏的误差传播过程和对估测位移造成的影响,创新性地提出一种简化的基于EKF的新算法—SEKF来估计偏差,实验证明:该算法能够很好地消除还原位移中因陀螺仪零偏造成的时变偏差,适用于无人机、机器人定位等领域。
1 九轴系统的位移平面旋转偏差
九轴MEMS系统[3]如图1所示。通过仿真,观测因陀螺仪零偏造成的偏差。仿真中各传感器读数模型为

式中na,t,nm,t,nω,t为白噪声;ra,t,rm,t,rω,t为抖动噪声;ba,bm,bω为常量偏差;各噪声方差用阿伦方差技术[4]求出。加速度at和角速度ωt由预先设定好的轨迹给出。

图1 九轴系统还原流程Fig 1 Reduction flowchart of nine-axis system
如图2,运动轨迹设定为导线截面YZ平面内的椭圆形,位移运动频率为1 Hz,测量点同时绕传感器坐标系X轴扭转,扭转角度按正弦规律变化。

图2 仿真轨迹示意图Fig 2 Diagram of simulated trajectory
九轴系统还原轨迹如图3所示,从图中可见还原轨迹有明显变形和偏移,且具有时变的特点。仿真发现,在不添加陀螺仪偏差bω的情况下,九轴系统的还原轨迹与真实轨迹十分接近,仅有小幅度偏移,如图4,而去除其他噪声对结果影响不明显。这说明,导致九轴系统产生图3的时变偏差的主要误差源是陀螺仪偏差bω。

图3 九轴系统还原轨迹与真实值对比Fig 3 Comparison of nine-axis system reduction trajectory with true trajectory
2 九轴系统的误差传播
为了定量地分析九轴系统的误差传播过程,假设t时刻,平动加速度为at,扭转为Rt则在不考虑向心加速度的情况,加速度计的读数为

图4 九轴系统还原轨迹与真实值对比(bω=0)Fig 4 Comparison of nine-axis reduction trajectorywith true trajectory(bω=0)

式中g=[0 0 9.8]T;Rt为t时刻测量点的扭转。由于传感器噪声和偏差的存在,从六轴算法得到的扭转矩阵Rest,t和真实值Rt有一定差距。从式(5)可以看到,得到的加速度aest,t由两项构成,ΔRt(g+at)代表扭转矩阵的的估计误差对加速度造成的传播误差。

下面推导ΔRt关于bω的表达式。旋转矩阵与角速度的关系如式(6)[5]

式中ωt×为叉乘算子。式(6)有解析解[6]式(8),其中,Θ(t,tk)满足式(9)、式(10)

假设ωt在tk~tk+1区间内为常数ωk+1,则由式(9)可得零阶积分因子式(11)
Θ(tk+1,tk)=exp(Ω(ωk+1)Δt)(11)代入到式(6)中得到式(12)
式中Rt1=I3×3。考虑陀螺仪读数为真实值加上偏差bω,将其代入可得扭转矩阵的估计误差式(13)


类比式(14)和式(6)可以看出,Rerr,t相当于是以常角速-bω在做旋转得到的扭转矩阵,与实际扭转角速度无关。进一步可得到ΔRt与bω的关系式(15)

从式(16)看出,当t比较小时,ΔRt是bω关于时间的正比例函数,这是图3中时变偏差呈线性趋势的主要原因


3 bω的估计与补偿
结合前面的分析可知,只要能够补偿bω,九轴系统得到的加速度就能逼近真实值,进而得到逼近真值的位移轨迹。本节给出两种bω估计方法。
3.1基于低通滤波的偏差估计
考虑扭转频率在0.1~3 Hz(比如监测导线舞动时,九轴单元随测量点周期性扭转),可直接计算陀螺仪测量值的均值予以补偿。然而随着时间的增加,当前读数对偏差的更新贡献越来越小,难以满足时变特点。针对于此,提出式(18)的基于低通滤波的改进方法

式中N为常数。
图5给出了偏差估计的响应曲线,初始估计偏差设为0,经过一段时间后各组均收敛到真实值。
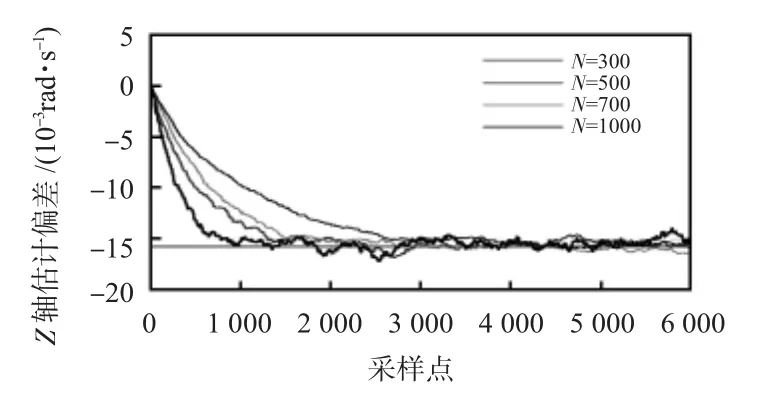
图5 偏差估计响应曲线(Z轴)Fig 5 Bias estimation response curve(Z axis)
3.2基于SEKF的偏差估计
当实际扭转为非周期性时,不能通过低通滤波估计零偏。在平动加速度近似为零的情况下,常见的估计陀螺仪偏差方法有融合加速度计、磁力计构建非线性EKF[7]、无迹卡尔曼滤波(UKF)[8],补偿滤波(CF)[9]等。由于平动加速度近似为零的假设与定位需求矛盾,只能考虑融合磁力计;另一方面,基于卡尔曼的算法中,陀螺仪偏差仅仅是状态向量的一部分,为了估计偏差须进行大量的计算,为此,本节推导一种新的状态向量中只包含陀螺仪偏差的SEKF。
定义从k-1到k时刻扭转四元数增量

式中δq=[δq2δq3δq4]T,

对于磁力计有
将式(23)展开,忽略δq的二阶小量



对于陀螺仪有

结合式(26)、式(27)得到bω的观测方程(观测噪声未显式地给出)

再结合bω的动力学方程即可搭建KF来估计陀螺仪偏差(具体更新过程文献[7])。
4 硬件实验与结果分析
九轴 MEMS单元:加速度计 MMA8451Q,磁力计MAG3110和陀螺仪FXAS21002C;Zig Bee CC2530;以单目测量系统[10]为参照(最大误差1cm)。在舞动试验机上进行的三组试验:第一组未进行陀螺仪偏差补偿;二组和三组采用式(18)和基于SEKF进行偏差补偿。
实验结果如图6所示。从图6(a)可见未进行陀螺仪偏差补偿时,九轴系统还原得到的位移有明显的时变偏差,与仿真结果和理论推导一致。而二组和三组(图6(b)和图6(c)),由陀螺仪偏差造成的时变误差明显消除了。从表1中可以看到,基于低通的校正以后位移幅值误差最小7.74%左右,最大13.84%,基于SEKF的最小9.51%,最大9.69%;各组频率误差均在1%以内。

图6 还原轨迹对比Fig 6 Reduction trajectory constrast
5 结论
本文基于九轴系统,通过仿真实验和推导,证明了影响位移还原精度的主要噪声源为陀螺仪零偏,零偏的存在会使还原轨迹产生严重的时变误差,短时间内为位移平面的线性旋转偏差。SEKF算法能够较好地估计陀螺仪偏差,从而消除位移中的时变误差,使位移幅值还原精度提高到90%。

表1 九轴系统幅值与频率误差对比Tab 1 Amplitude and frequency error contrast of nine-axis system
[1]Woodman O.An introduction to inertial navigation[R].Cambridge:University of Cambridge,2007.
[2]Foxlin E.Pedestrian tracking with shoe-mounted inertial sensors[J].IEEE Computer Graphics and Applications,2005,25(6):38-46.
[3]邵颖彪,杨晓辉,郭薇,等.基于九轴传感器监测导线舞动的研究方法[J].智能电网,2015,5(1):1-8.
[4]El-Sheimy N,Hou Haiying,Niu Xiaoji.Analysis and modeling of inertial sensors using Allan Variance[J].IEEE Trans on Instrumentation and Measurement,2008,50(1):140-149.
[5]Kuipers J B.Quaternions and rotation sequences[M].Princeton,NJ:Princeton Univ Press,1999:276-277.
[6]Trawny N,Roumeliotis S.Indirect Kalman filter for 3D attitude estimation[R].Minneapolis:University of Minnesota,2005.
[7]Lefferts E J,Markley F L,Shuster M D.Kalman filtering for spacecraft attitude estimation[J].Journal of Guidance,Con-trol,and Dynamics,1982,5(5):417-429.
[8]Crassidis J L,Markley F L.Unscented filtering for spacecraft attitude estima-tion[J].Journal of Guidance,Control,and Dynamics,2003,26(4):536-542.
[9]Foxlin E.Inertial head-tracker sensors fusion by a complementary separate-bias Kalman filter[C]∥Proceedings of VRAIS'96,IEEE,1996:185-194.
[10]敬泽,薛方正,李祖枢.基于单目视觉的空间目标位置测量[J].传感器与微系统,2011,30(3):125-130.
Study on error analysis and compensation algorithm based on nine-axis MEMS positioning system*
ZHANG Gang1,ZHU Qin-xiang1,GUO Wei1,YANG Xiao-hui2
(1.State Key Laboratory of Advanced Optical Communication Systems and Networks,Shanghai Jiao Tong University,Shanghai 201100,China;2.Electric Power Research Institute,State Grid HAEPC,Zhengzhou 450052,China)
Based on nine-axis micro-electro-mechanical system(MEMS)positoning system,analyze and compensate on displacement plane deflect error caused by gyroscope zero-bias.By experiment and formula derivation,quantitative analysis on deviation is firstly given,and establish a mathematic model for error propagation;to estimate deviation,design a new simplified extended Kalman filtering(SEKF)technology,which has state vector containing gyroscope zero-bias only,overcome the estimation deviation problem without accelerometer,reduce calculations amount,this algorithm can nicely meet the online estimation demand for displacement.By hardware experiment,nine-axis MEMS system can accurately estimate the displacement of cyclical movement in limited range,after bias compensation,the accuracy of magnitude positioning reaches 90%.The system can be used for unmanned aerial vehicle(UAV),robot localization,and other fields.
nine-axis MEMS tracking system;error analysis;gyroscope bias estimation;simplified extended Kalman filter
TP212
A
1000—9787(2016)06—0013—04
10.13873/J.1000—9787(2016)06—0013—04
2015—10—08
国网公司重大科技资助项目(17KJ160101F1002920100);国家重点实验室自主课题资助项目
张港(1989-),男,河北秦皇岛人,硕士,主要从事基于MEMS的导航定位方面的研究。
