水轮机调速器改进型控制结构结合增量式PID算法的功率调节及一次调频的实现
2016-08-26刘国富王晓瑜金玉成哈尔滨电机厂有限责任公司哈尔滨150040
刘国富,王晓瑜,金玉成(哈尔滨电机厂有限责任公司,哈尔滨 150040);
水轮机调速器改进型控制结构结合增量式PID算法的功率调节及一次调频的实现
刘国富,王晓瑜,金玉成
(哈尔滨电机厂有限责任公司,哈尔滨 150040);
针对现有调速器功率调节的参数通用性低,难以满足不同工况下功率调节和一次调频要求的问题,本文提出了一种改进型功率调节控制结构,幵在此基础上采用功率偏差增量式PID算法,建立了新的水轮机调速器功率调节模型。电站投运结果表明该方法参数调整方便,通用性强,能够较好的满足水力发电厂关于功率调节及功率模式下一次调频的要求。
调速器;功率调节;改进型功率控制结构;增量式PID算法;一次调频
0 引言
水轮机调速器多采用开度调节模式或频率调节模式,幵网运行后机组功率调节功能由电厂AGC系统实现,当频率超过一次调频死区,调速器投入一次调频功能时,调速器根据频率变化调节导叶开度,此时机组实际功率与AGC目标不一致,如处理不当,AGC会反向调节,导致机组一次调频性能指标不能满足要求;而且在AGC进行功率闭环调节时,调节时间较长,功率偏差较大。基于以上原因,很多大型水力发电厂要求由AGC进行负荷分配,由水轮机调速器实现功率调节功能。
由于水轮机调节系统的复杂性、非线性等特性,现有的调速器功率调节控制难以满足不同工况的调速器功率调节和一次调频的性能要求,本文在分析当前调速器功率调节结构及算法的基础上,提出一种改型功率调节结构,幵结合增量式PID算法,建立了新的水轮机调速器功率调节模型,幵采用水轮机仿真系统对该方法进行模拟测试,结果表明该控制方法参数调整方便、通用性强、能够较好的满足水力发电厂关于功率调节及一次调频的要求。
1 调速器功率调节结构算法及特性分析
调速器功率调节结构图如图1所示[1]。
1.1一次调频特性分析
水轮发电机组调节系统根据自身负荷或频率的静态和动态的特性对电网频率的响应称为一次调频。电网对水电机组一次调频有如下要求:
(1)幵网发电机组均应参与电网一次调频。
(2)对于功率调节,水轮机系统中的调差率Ep为4%~6%(电网运行准则(DL/T1040—2007)规定Ep≤3%)。
(3)频率(转速)死区Ef=±0.05Hz。

图1 功率调节结构框图
(4)响应特性即电网频率变化超过一次调频频率死区时,机组应在15s内响应机组目标功率,在45s内机组实际功率与目标功率偏差的平均值应在其额定功率的±3%内,稳定时间应小于1min 。
(5)负荷变化幅度限制:水电机组参与一次调频的负荷变化幅度应该不加限制,一次调频功能为必备功能,不得由运行人员切除,不得在开度限制工况下运行。
对应功率调节结构框图的调速器PID调节算法:

在功率调节模式下,由于微分系数对功率没有调节作用,一般取0,YD=0,公式(1)简化为
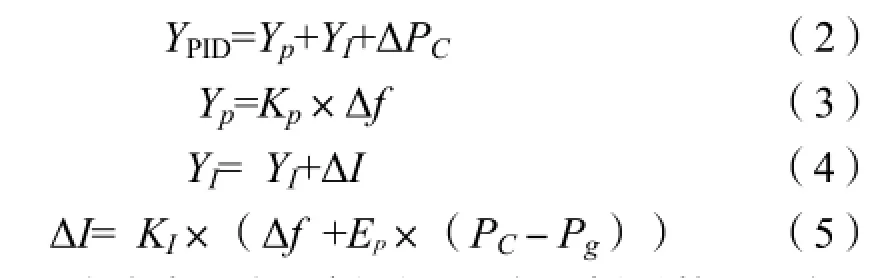
以上公式中Yp为比例项,Kp为比例系数;YI为积分项;KI为积分系数;ΔI为积分增量;YD为微分项;Δf=fc-fg。
在大网功率模式下,输入量fg为电网频率,由于电网频率的变化十分缓慢。当Δf超过频率死区投入一次调频功能时,由于一次调频对应的频率变化较小,Yp值改变不大,主要是YI改变使导叶移动,当ΔI=0时,导叶不再变化,机组功率稳定在一个新的值。
从上面分析可以知道,影响一次调频响应时间的参数为比例系数Kp和积分系数KI,KI起主要作用。
功率给定值由AGC系统按照二次调频功率分配机组负荷,在一次调频动作时可考虑为恒量,根据公式(4)得出一次调频动作功率最终的变化值为:

1.2功率调节特性分析
调速器功率调节多采用两段式调节规律(1),如图2所示。当调速器接收到的AGC功率给定值PC与当前功率给定值PC1偏差的绝对值ΔP大于ΔP0(ΔP0约为0。5%~2%的机组额定功率)时,调速器以较快的变化率K1将功率给定从当前PC1变化到PC±ΔP0;当偏差绝对值ΔP小于ΔP0时,调速器以较慢的变化率K2将微机内功率给定从当前PC1变化到PC。

图2 功率给定值两段调节特性
根据功率调节结构图,在积分环节引用功率给定和机组功率等参数,把功率给定与机组功率的偏差转化为开度给定的变化ΔYC,比例系数Kp对调节功率没有作用,影响功率调节性能的是功率给定的变化率K1、K2,为满足一次调频调节时间要求,必须增大积分系数KI和比例系数Kp,然后通过减小K2来抑制KI在调节功功率时的作用。参数K1和K2的调整必须考虑导叶开度与机组功率的对应关系。导叶开度与机组功率间关系有以下特点[2]:
(1)机组有功功率变化滞后导叶开度变化。对于引水系统较长的机组,有功功率滞后时间可达1s。对于轴流转浆或灯泡贯流式机组,由于浆叶开、关机时间比导叶长,导致机组有功功率变化严重滞后导叶开度变化;
(2)由于导叶开、关机时间的限制,导叶开度的变化滞后PID控制输出;
(3)对于刚性引水系统,在导叶开始移动时,由于水锤的作用,导致机组有功功率反向变化;
(4)在恒定水头下机组有功功率与导叶开度关系非线性。在空载开度到某一开度之间,机组功率变化较大,且随着导叶开度的增加,机组功率的变化率增加;在此开度到最大开度之间,机组有功功率变化率较小,当导叶开度超过最大开度时,机组有功功率会变小。
(5)在不同的机组水头下,同一导叶开度对应于机组的不同功率。
上述可知,功率与导叶开度是非线性关系,K1、K2参数很难调整,且在不同的水头,这种关系会发生改变,所以对于不同的水头,仅由K1、K2实现对功率给定变化率的控制很难满足功率调节性能要求,参数的通用性较差。
2 改进型功率调节模式
功率调节模式主要应用于机组大网带负荷运行,需满足电网一次调频要求。根据功率调节的控制目标,对功率调节PID结构进行改进,在比例项、积分项及微分项均针对功率给定值与实测值的变化进行计算,直接对功率进行控制,且可根据实际工况通过调整微分系数提高系统的动态性能,同时考虑功率调节模式一次调频要求,在积分项中引入频率的变化,得到改进型功率调节结构框图,如图3所示。
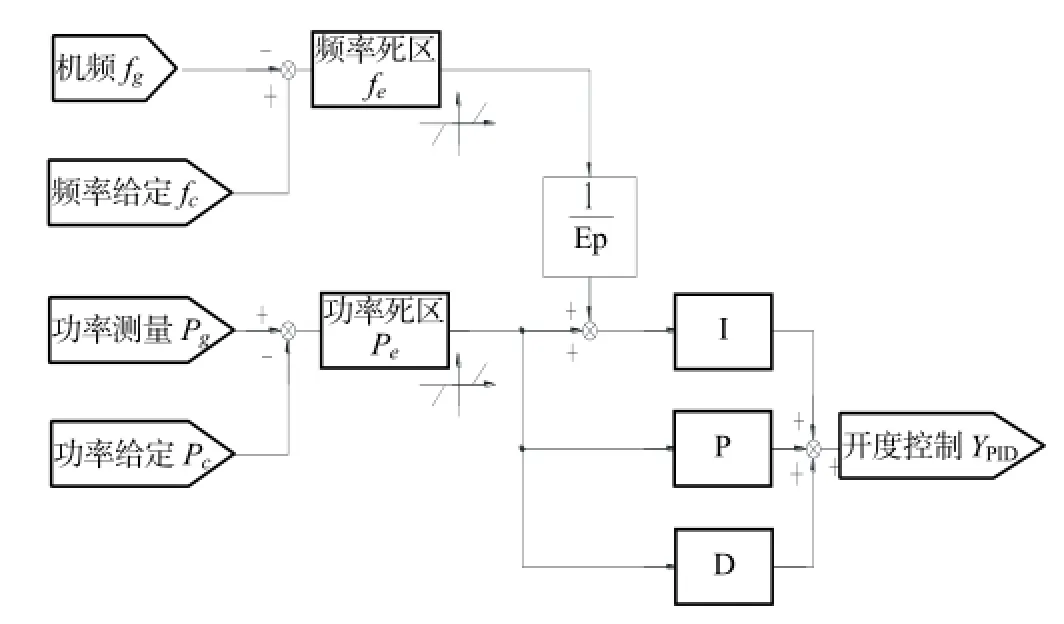
图3 改进型功率调节结构框图
图3中,Ep为调差率,P为比例项,I为积分项。
根据上述特点,在改进型功率调节结构基础上,采用增量式PID算法,具有如下优点:
(1)利于调节模式的跟踪切换;
(2)由于PID增量的限制使PID的给定值不突变,使得控制输出的变化减慢,解决导叶变化滞后PID控制输出的问题;
(3)增量式PID算法加速了系统的动态过程。
同时,为了保证不同水头下功率调节的性能,采用变参数结构,在功率给定变化阶段和稳定阶段减小比例系数和积分系数,保证改进阶段的功率调节过程不会出现较大超调,在功率偏差较大时选用正常的控制参数,保证功率调节过程的快速跟踪性和收敛性。
改进型功率偏差增量PID算法:
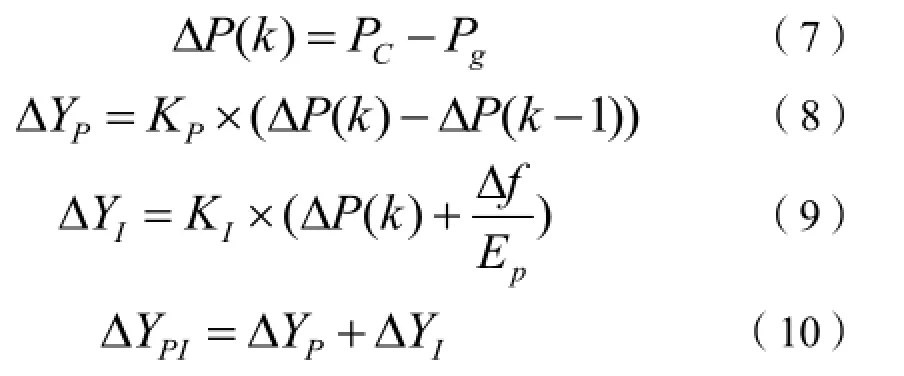

上列公式中,ΔP(k)为当前功率偏差,ΔP(k-1)为上次功率偏差,Δ f为频率偏差,KP为比例系数,KI为积分系数。
3 运行试验
在尼日利亚凯恩吉水电站调速器中我们采用了改进的功率调节算法,幵对功率调节性能及一次调频性能进行了测试。
尼日利亚凯恩吉电站安装了12台轴流转浆式水轮发电机组,机组功率闭环由调速器功率调节模式实现。机组额定功率为125MW,导叶开机时间10s,第一段关机时间6.9s,第二段关机时间11s,分段拐点为29.6%,浆叶开、关机时间均为30s,调速器Bp设为6%,一次调频死区为0.05Hz。
3.1功率调节试验
调速器工作于功率调节模式,Kp=1.2,Ki=0.3,浆叶处于协联状态,把功率给定从10突变为76MW,负荷调整曲线如图4所示,从试验录波图分析,负荷调节时间80s,实现了功率调节的快速跟踪性和收敛性,满足功率调节的性能要求。
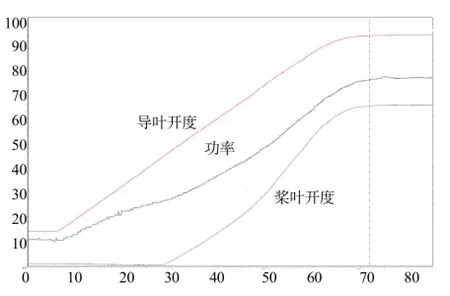
图4 功率调节负荷调整录波曲线
3.2一次调频试验
调速器工作于功率调节模式,浆叶处于协联状态,机组带60MW负荷,通过测试仪一次调频试验功能,机组频率阶跃变化0.2Hz,根据理论计算机组功率变化值
图5为一次调频试验录波曲线,从试验录波图看出,从频率变化开始到机组有功功率开始响应时间为10s,到机组功率稳定时间为30s,满足一次调频的响应速度要求。

图5 一次调频试验录波曲线
4 结论
通过试验证明,改进型的功率调节结合增量式PID算法,以机组功率为控制对象,程序结构简单、清晰,参数调节方便,变参数结构减小了负荷调节时水锤的影响,负荷调节响应速度快,性能指标满足电站功率调节和一次调频要求。
[1]魏守平, 王雅军, 罗萍. 数字式电液调速器的功率调节[J]. 水电自动化与大坝监测, 2003(4).
[2]魏守平. 现代水轮机调节技术[M]. 武汉: 华中科技大学出版社, 2002.

刘国富(1968-),1992年毕业于华中科技大学电力工程系,本科,长期从事水轮机调速器设计与研究,工程师。
审稿人:朴秀日
The Realization of Improved Power Regulation Control Structure and The Frequency Primary Regulation for Hydraulic Turbine Governor
LIU GuoFu, WHANG Xiaoyu, JIN Yucheng
(Harbin electric machinery company limited, Harbin 150040, China)
For the existing governor power regulation parameters have low generalities and cannot meet the requirements of the power regulation and the frequency primary regulation under the different work condition, the article proposes a improved power regulation control structure, and adopts the power offset increment PID algorithm to build a new typeturbine governor power regulation model. According to running result of the power station which adopts the improved control structure, the governor parameters have high generalities and are easy to adjust, and can meet the requirements of the power regulation and the frequency primary regulation under the different condition.
governor; power regulation; improved power regulation control structure; increment PID algorithm; frequency primary regulation
TK730.4+1
A
1000-3983(2016)04-0061-04
2015-06-19
