60°坐标系下三电平逆变器SVPWM的关键问题
2016-08-24牟文静鲁金升黄梁松
牟文静,卢 晓,鲁金升,黄梁松
(山东科技大学 电气与自动化工程学院,山东 青岛 266590)
60°坐标系下三电平逆变器SVPWM的关键问题
牟文静,卢 晓,鲁金升,黄梁松
(山东科技大学 电气与自动化工程学院,山东 青岛 266590)
在学习与应用60°坐标系SVPWM优化算法过程中,认为在60°坐标系下SVPWM算法不需要三角函数的计算和查表运算,是对60°坐标系SVPWM算法的误解。为纠正这一误解,对传统SVPWM算法和60°坐标系SVPWM算法进行了比较分析,并从理论推导和DSP实现两个方面做了相关阐述。详细介绍了如何用DSP F28335实现60°坐标系下三电平逆变器的SVPWM十二路驱动波形的输出并用示波器观察输出的波形。证明了60°坐标系下的SVPWM算法只是减少了三角函数的计算量,而且在用DSP F28335实现该算法时不需要三角函数的查表运算。使用这一算法提高了系统的运行效率。
SVPWM算法;60°坐标系;三角函数;查表运算
0 引言
1980年,日本长岗科技大学A.Nabae等人提出了二极管中点箝位式三电平逆变器[1]。使用IGBT组成逆变电路,通过控制IGBT的开通和关断来控制电压的输出。三电平逆变器的控制策略常见的有空间矢量脉宽调制(SVPWM)和正弦脉宽调制(SPWM)两种[2,3]。由于SVPWM具有更好的谐波优化效果,更高的电压利用率[4],成为目前研究的热点并且得到了广泛应用。正因为如此,目前关于SVPWM控制策略也提出了多种优化方法。Nikola Celanovic最先提出优化的方法,给出了基于60°坐标系的SVPWM的算法[5],使得复杂的三角函数运算大大简化了。
在学习和应用与60°坐标系SVPWM算法相关的大量国内文献时,发现有许多文献对Nikola Celanovic的简化算法的理解不全面,例如认为“可省去 ‘三角函数运算’、‘无需查表运算’”等,本文通过对60°坐标系下SVPWM算法较深入的分析,完善了这一观点,并对实现该算法时的关键问题做出了说明。
1 三电平逆变器的工作原理
本文使用的多电平逆变器的拓扑结构为二极管箝位型三电平逆变器,其输出的波形质量比两电平逆变器的要好。
1.1NPC三电平主电路
图1为二极管箝位型三电平逆变器的主电路图。三电平逆变器的主电路的每一相桥臂都有4 个IGBT,4个续流二极管和两个箝位二极管,直流侧有两个分压电容,电容值大小相等,每个电容值承受的电压大小为Vdc/2。两个箝位二极管的中点与直流侧两个电容的中点相连,将直流侧的中点电位箝位于每相的输出电压上,这样使得每相上的IGBT关断时承受电压仅为Vdc/2[6]。同时,箝位二极管可以防止电容被短路连接,当IGBT导通时提供电流通道[5]。每相有三种有效开关状态可以使用。三种开关状态对应的输出电压,以A相为例:正端电压P(Vdc/2)、负端电压N(Vdc/ 2)和中点零电位O(0)[3]。

图1 二极管箝位型三电平逆变器主电路
1.2开关状态分析
三电平逆变器电路中每相桥臂有3种有效开关状态,分别为P、O、N,故三电平NPC逆变器共有27种开关状态组合,对应27个空间电压矢量[3],如图2所示。根据基本矢量幅值大小的不同,将27组开关状态所对应的27个基本电压矢量分为大矢量、中矢量、小矢量和零矢量。大矢量的模为2×Vdc/3,共有6个;中矢量的模为2× Vdc/3,共有6个;小矢量的模为 Vdc/3,共有12个;零矢量的模为零,共有三个,即为开关状态PPP,OOO和NNN。

图2 三电平NPC逆变器空间矢量图
2 60°坐标系下SVPWM算法
2.1传统的SVPWM算法
为与60°坐标系下SVPWM算法相比较,这里先给出传统的α-β坐标系下SVPWM算法。在传统的α-β坐标系下和在60°坐标系下,SVPWM算法的实质都是:在27个基本电压矢量中,选择离参考电压矢量Vref最近的3个基本电压矢量,根据对电机数学模型的分析以及对其变频调速控制系统的研究[7-9],采用冲量平衡原理来合成参考电压矢量Vref的方法。由于传统的α-β坐标系下的SVPWM算法已有很多论文做了详细阐述[2],这里直接引用他们给出的Vref在小扇区n中基本电压矢量作用时间的计算结果,如表1所示。
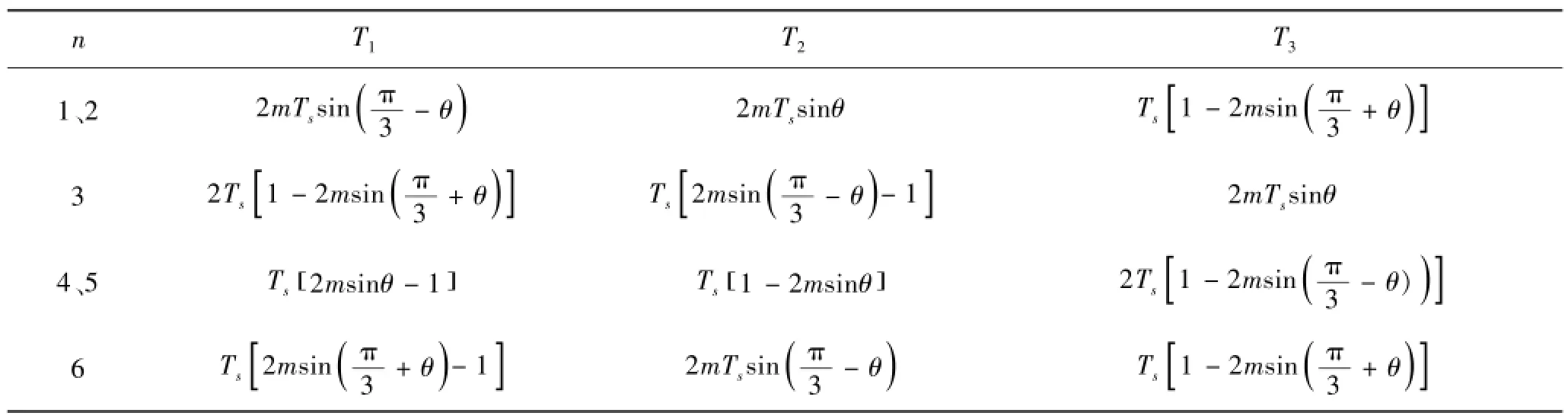
表1 各小区基本电压矢量作用时间
显然,这些算式中含有较多的三角函数,无法实现控制的实时性[10],需要存储大量的正余弦数据,占据较大的存储空间,这是传统算法的缺点。为克服这一缺点,Nikola Celanovic最早提出了基于60°坐标系的SVPWM优化算法。
2.260°坐标系下SVPWM算法
60°坐标系下的SVPWM优化算法是基于这样的思考:传统的SVPWM算法中,三角函数运算较多的根本原因是采用了α-β坐标系;观察三电平NPC逆变器空间矢量图2可知,基本电压矢量之间的夹角都为60°或是60°的倍数,若采用基于60°坐标系的SVPWM算法,能够简化三角函数运算。如图3所示,60°坐标系的横轴为g轴,纵轴为h轴,其中g轴与α轴重合,h轴为g轴逆时针旋转60°[11]。
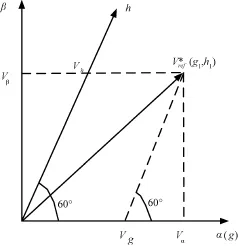
图3 60°坐标系
基于上述,由文献[1],Nikola Celanovic给出的公式

其中

不失一般性,设当前的参考电压矢量Vref位于图2中的第I扇区,由参考电压矢量Vref在60°坐标系g轴和h轴的投影,可得在60°坐标系下Vref的坐标(g,h);同时,采用文[1]的方法,将基本矢量长度规则化(向上/向下取整),因此转换后参考电压矢量的坐标都为整数[1]。
从式(3) 中可以看出 VAO、VBO、VCO为互差120°的三相相电压正弦波,根据三电平SVPWM算法的原理,参考电压矢量每旋转一个Δθ角度就要采样一次(Δθ是与采样周期TSVPWM相对应的角度增量)。由于 VAO、VBO、VCO是瞬时值,从公式(1)可以看出,为了计算 Vref的坐标值(g,h),必须得到VAO、VBO、VCO的瞬时值,即基于图3的几何关系得到传统坐标系与60°坐标系之间的关系式(4)[6]。

需要指出的是,正是根据关系式(4),才能将90°坐标系下基本电压矢量的作用时间转换为60°坐标系下相应的作用时间,并表达为表2中的形式。表2给出了6个小扇区中基本电压矢量作用时间算式。因此,在基于DSP的SVPWM算法的实现过程中,仍需进行正弦函数的运算。
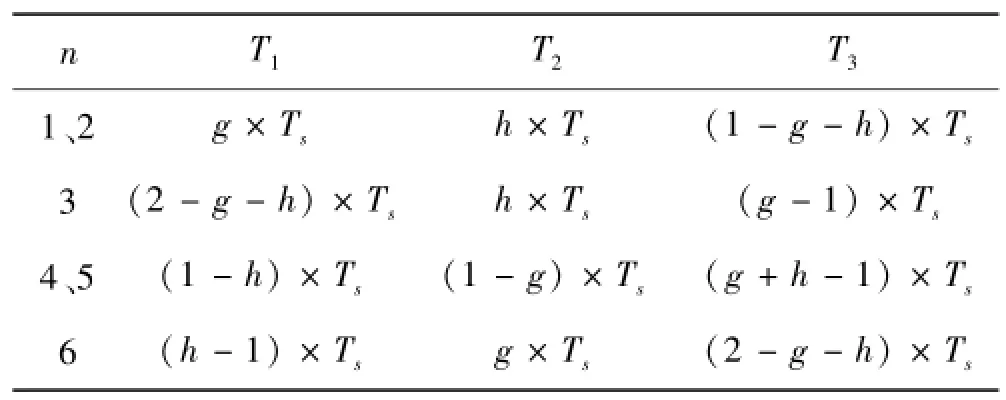
表2 基本矢量作用时间
由于仅从表2看,60°坐标系下,基本电压矢量作用时间的计算似乎不需要做三角函数计算。如果仅做仿真,仿真过程中确实无需进行三角函数运算。这是因为在仿真软件中已经给出了相电压的正弦波,可获得任何瞬间的电压即时值,于是就误以为:在60°坐标系下,SVPWM算法 “可省去 ‘三角函数运算’、‘无需查表运算’”等,并由此得出不正确的结论。需要特别指出的是,上述所谓 “SVPWM算法 “可省去‘三角函数运算’””观点对文献[1]的理解并不全面,式(4)已经对此做出证明,也就是说,在实际DSP系统中,当采用60°坐标系方法计算 Vref时,由于必须计算 Vref的坐标值(g,h),所以三角函数的计算是不能省去的。但需要指出的是,在DSP(例如F2812和F28335)中,由于芯片内部具有正余弦计算的库函数,所以只需直接输入相应的θ值,即可得到对应的三角函数值,并且无需存储或查表。至于60°坐标系方法的优点,文献[1]已明确指出,这里不再赘述。
3 DSP F28335 实现
本例采用控制精度较高的DSP F28335来实现60°坐标系下的SVPWM算法,DSP F28335输出十二路互补的SVPWM信号,经三电平逆变器后输出电机所需要的交流电[12]。
3.1软件实现(七段法)
(1)SVPWM周期的计算与实现
本例中,采样(或开关)频率ft=5 kHz(相应的采样周期TSVPWM=200 us),已知系统时钟SYSCLKOUT为150 MHz,为了输出采样频率ft=5 kHz的SVPWM波,根据系统分频公式TBCLK= SYSCLKOUT/(CLKDIV×HSPCLKDIV)和SVPWM周期与计数器工作模式之间的关系知,TSVPWM=2×TBPRD×TBCLK,设置CLKDIV的分频系数为2,HSPCLKDIV的分频系数为1,经过分频后TBCLK=75 MHz,最后计算得 TBPRD的值为7 500。
(2)死区设置
考虑到IGBT的开通和关断存在延迟现象,需要设置SVPWM波的死区时间。根据IGBT的硬件特性,设置SVPWM波的上升沿和下降沿的延时时间,在本次试验中设置IGBT开通和关断的延时时间为3 us。在死区产生子模块(DB)中设置上升沿(RED)和下降沿(FED)的死区时间都为3 us,则经过公式FED=RED=DBFED×TBCLK计算得DBFED=DBRED=225。同时,根据每个小扇区基本矢量作的用顺序设置死区方案为低电平有效互补输出(ALC)。
(3)作用时间的计算与存储
根据系统计算得到Vref的角度θ后,使用DSP F28335(F2812)中特有的正余弦函数库来计算其在60°度坐标系下的坐标值(g,h),判断其所在大、小扇区,然后根据表2的算式,可以分别算出各小扇区基本矢量的相应作用时间[3]。在判断Vref所在大、小扇区和计算作用时间时没有三角函数的计算,也无需查表运算,与传统的SVPWM算法相比,提高了系统的运行效率。以第I大扇区中第一小扇区PWM波形为例,根据基本矢量的作用顺序画出SVPWM波形图,如图4所示。从图4中可以看出基本电压矢量POO、OOO、OON的作用时间分别为T1、T2、T3,则调制波的表达式Ta、Tb、Tc分别为:


图4 I大扇区第一小扇区SVPWM波形示意图
为了输出互补的十二路SVPWM波,根据图4中的波形示意图,初始化DSP F28335的EPWM模块中时间基准(TB)子模块的计数模式为增减计数模式。同时,设置动作限定(AQ)子模块的动作限定输出通道A控制寄存器(AQCTLA)在基准计数器递增时,使EPWMxA为高电平;在基准计数器递减时,使EPWMxA为低电平。根据基本矢量的作用顺序将计算的作用时间赋值给比较寄存器 A(CMPA)。图4中 EPWMxA为DSPF28335中输出SVPWM波的引脚,DSPF28335中与EPWMxA互补的引脚为EPWMxB。其中EPWM1A与图1中SA1连接,EPWM1B与图1中SA3连接,EPWM2A与图 1中 SA2连接,EPWM2B与图1中SA4连接。
(4)变频
实现变频有两种调制方法:同步调制和异步调制,选用异步调制。异步调制即载波比N不为常数,通常是在ft保持不变时改变fr的值,这可以提高低频时的载波比,改善低频工作特性[13]。参考电压矢量旋转一周即角度θ从0°增加到360°的时间即为一个周期T,改变周期T就改变了SVPWM波的频率。为了实现变频,即改变电压矢量的旋转角速度θ,采用异步调制,保持采样周期ft不变,通过改变θ从0°增加到360°的采样次数,进而改变了电压矢量旋转一周的时间。
3.2测试结果
用示波器观察DSP F28335引脚输出的波形如图5所示。图5中从上到下测试的依次为 EPWM1A、EPWM1B、EPWM2A和EPWM2B引脚输出的波形,从图5中可以看出输出为两对互补的SVPWM波。图5中波形放大后的效果如图6,从图6中可以看出波形存在死区。

图5 SVPWM波形图
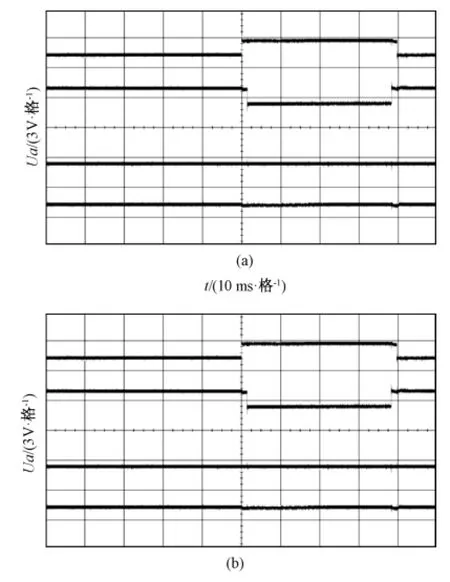
图6 SVPWM放大波形图
4 结论
本文对三电平二极管箝位型逆变器的主电路的拓扑结构和开关状态进行了简单分析。在分析比较传统SVPWM算法和60°坐标系下SVPWM算法的基础上,证明了60°坐标系下SVPWM算法仍需要三角函数的运算这一观点。对三电平逆变电路与十二路SVPWM驱动信号的对应关系做出了分析。详细介绍了用DSP F28335实现SVPWM波形输出的方法,并用示波器观察输出的波形。
[1]NABAE A,TAKAHASHI I,AKAGI H.A new neutralpoint-clamped PWM inverter[J].IEEE Transactions on Industry Applications,1981,IA-17(5):518-523.
[2]RODRIGUEZ J,LAI J S,PENG F Z.Multilevel inverters: a survey of topologies,controls,and applications[J].Industrial Electronics IEEE Transactions on,2002,49(4): 724-738.
[3]符晓,伍小杰,于月森,等.基于g-h坐标系SVPWM算法三电平 PWM整流器的研究[J].电气传动,2009,39(6):29-33.
[4]彭咏龙,黄潇潇,李亚斌.基于SVPWM的高功率因数三相混合开关型整流电路研究[J].电力科学与工程,2013,29(6):23-29.
[5]CELANOVIC N,BOROYEVICH D.A fast space vector modulation algorithm for multilevel three-phase converters[C]//Industry Applications Conference,1999.Thirty-Fourth Ias Meeting.Conference Record of the.IEEE,1999:637-641.
[6]桂红云,姚文熙,吕征宇.DSP空间矢量控制三电平逆变器的研究[J].电力系统自动化,2004,28(11): 62-65.
[7]徐奔奔,周芝峰,霍文明,等.基于改进的模糊控制PMSM矢量控制系统研究[J].电力科学与工程,2016,32(3):1-6.
[8]刘明基,郭韩金,舒佳驰.基于SVPWM技术的永磁同步电机模糊自适应控制系统研究[J].电力科学与工程,2013,29(2):11-14.
[9]吴恩周,马小军.感应电机变频调速系统的效率优化控制仿真研究[J].电力科学与工程,2016,32(4): 28-31.
[10]樊英杰,张开如,韩璐,等.基于优化SVPWM三相VSR的仿真与研究[J].电测与仪表,2015(12):40 -45.
[11]高辉.基于转子磁链定向矢量控制三电平变频器的设计与研究[D].沈阳:东北大学,2012.
[12]张玉地,钱炜,孙福佳,等.基于DSP的PMSM伺服控制系统设计[J].电力科学与工程,2015,31(3): 58-62.
[13]陈伯时.电力拖动自动控制系统——运动控制系统(第3版)[M].北京:机械工业出版社,2006.
The Key Problems of Three Level Inverter SVPWM in the 60 Degrees Coordinates
MU Wenjing,LU Xiao,LU Jinsheng,HUANG Liangsong
(Electrical and Automation Engineering Institute,Shandong University of Science and Technology,Qingdao 266590,China)
In the process of learning and applying the 60 degrees coordinate system SVPWM optimization algorithm,a lot of literature thinks that SVPWM does not need the calculation of the trigonometric function and the operations of look-up table,but the paper argues that this is a misunderstanding of 60 degrees coordinates system SVPWM algorithm.In order to correct the misunderstanding,the paper makes a comparative analysis of the traditional SVPWM algorithm and the 60 degrees coordinates SVPWM algorithm,and does a related elaboration from the two aspects of theoretical derivation and the DSP implementation.After that,it introduces detailedly how to realize the output of SVPWM 12 road driving waveform of the 3-level inverter in 60 degrees coordinates and observes the output waveform using the oscilloscope.It proves that SVPWM algorithm in 60 degrees coordinates only reduces the calculation of trigonometric function,and it does not require trigonometric function table lookup operation when uses DSP F28335 to realize the algorithm.The algorithm improves the operation efficiency of the system.
SVPWM algorithm;60 degrees coordinates system;the trigonometric function;the operations of look -up table
TM933
A DOI:10.3969/j.issn.1672-0792.2016.07.001
2016-05-13。
青岛经济技术开发区科技项目(2014-1-33);青岛市应用基础研究计划项目(14-2-4-19-jch)。
牟文静(1989-),女,硕士研究生,研究方向为控制理论及应用,E-mail:abubujing@163.com。
