精密接触扫描测头机械系统关键技术研究
2016-08-23李伟伟李雅宁白
李伟伟李雅宁白 伟
精密接触扫描测头机械系统关键技术研究
李伟伟1李雅宁1白 伟2
(1.西安工业大学,西安 710000;2.长庆油田分公司第三输油处,西安 710021)
精密测量技术的发展作为现代工业发展的重要标志,其测头的设计与制造水平直接制约着坐标测量机的发展。接触扫描式测头作为一种典型的代表,具有测量精度高、性能稳定、测量效率高的诸多优点,被广泛应用于精密检测与在线制造检测中。因此,扫描测头的导向机构、位移检测机构、复位机构等关键技术就作为我们今后研究的重点。
精密测量 扫描测头 导向机构 复位机构 检测机构
引言
伴随着科学技术的快速发展,精密测量技术在工业方面得到了越来越广泛的应用。坐标测量机作为现代测量技术的代表,得到了广泛的应用,随着对加工精度的要求越来越高以及加工复杂性的提高,尤其是一些复杂曲面的加工,以及在一些逆向工程中的应用,坐标测量机的作用就显得尤为突出[1]。
在坐标测量设备中,测头系统是坐标测量机的重要部件,其性能直接影响着精密测量仪的测量精度、工作性能、使用效率和柔性程度,对提高测量机的整体精度具有关键的作用。测头的发展直接制约着坐标测量机的性能,只有在精密测头为坐标测量机提供新的测量原理、新的测量精度后,坐标测量机的精度和测量效率才能得到进一步的发展。换言之,精密测头是限制精密测量仪精度和速度的主要因素,精密量仪能否满足现代测量要求也依赖于精密测头的不断创新与发展[2]。所以,对于测头的研究已经成为现代测量技术中的专项课题。
1 测头的技术发展
精密测头的最早发展可以追溯到上世纪20年代电感测微仪的出现,但其真正的快速发展是随20世50年代末坐标测量机(Coordinate Measuring Machine CMM)的出现测头技术得到了快速的发展[1]。
国内的扫描测头的研究和开发比较晚,也没有行形成产业化生产,仅是在一些高校和研究机构中对其进行研究,
做的比较好的诸如天津大学、北京工业大学、合肥工业大学、哈尔滨精达测量仪器有限公司等[3-16]。
国外的坐标测量机发展的比较早,技术相对的成熟,也形成了产业化,与之相配套的扫描式坐标测量测头也得到了飞速的发展。其中,比较知名的公司有英国的Renishaw公司、德国的Klingberg公司、Leitz公司和Carl Zeiss公司、瑞士的Mecartex公司以及美国的EMD公司等[17-31]。
2 扫描测头的布局形式
目前,国内外的坐标测量机用的扫描测头主要有并联与串联式的两种,串联式测头结构相对简单,但各个测量方向之间存在着耦合现象,使得测量结果存在较大的误差;而并联测头的各个测量轴的力学特性相同,但其制造、装配困难;因此,设计一种结构简单,而又不失测量精度的扫描测头是研究工作的主要内容。
Delta机构是并联机构的一种,属于少自由度的空间并联机构,1985年首次由洛桑理工学院的(雷蒙克拉韦尔)Reymond Clavel博士提出,由于该机构的上下两个平台均呈三角形而得名。Delta机构克服了并联机构诸多缺点,具有承载能力强、运动耦合弱、力控制容易、安装驱动简单等优点,因而备受工业界与学术界的青睐[33]。
利用Delta机构的原理,设计一种完全解耦的并联测头是我们今后工作的研究重点,图1是该测头的设计的原理图[34]。

图1 平动Delta并联机构原理图
3 扫描测头的基本构成单元
3.1 导向机构
测头的运动导向机构(通常也称为导轨),其是将测球的位移矢量转换成沿着空间坐标三个轴向位移,使得传感器机构能够较为方便的检测和识别位移信号。
测头的导向机构是测头设计、制造过程中的关键技术,是影响测头性能提高的关键因素。常见的测头导向机构主要都是采用材料的弹性变形来实现的,传统的滑动导轨和滚动导轨在测头的设计中极少实用。
应用于测头设计的导向机构主要有平行簧片导向机构、柔性铰链导向机构、杆组导向机构等类型。这些导向机构都具有结构紧凑,重量轻,加工简单,运动过程中无机械摩擦,不需润滑,不产生热量和噪声,运动灵敏度较高,它的运动范围一般能达到几十微米到几毫米,分辨率达到亚微米级。
如图2(a)和图2(b)所示平行簧片式导向机构,其中图2(b)采用了带加强板的形式以提高其稳定性和导向精度。

图2 平行簧片导向机构
如图3(a)、图3(b)是单双边柔性铰链导向机构,这类机构通常采用线切割的方式加工,在结构上一体化设计和利用弹性形变产生运动和传递能量,运动精度易于保证。图3(c)为平面柔性铰链导向机构[32],一般采用普通的片簧加工而成,加工成本低,结构装配简单,特别适合于精密机械设计领域。
还有一类测头的导向机构采用的是杆组类,这类导向机构可以同时实现二维方向运动,结构简单、灵活。如图4所示。

图3 柔性铰链导向机构
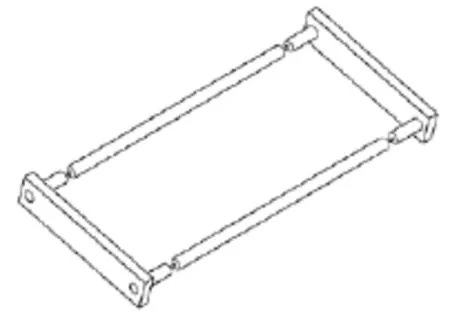
图4 杆类导向机构
3.2 位移传感器
测头的位移检测机构是将测针的位移量变换为易于处理的电信号。一般在测头测量仪器中,常用的位移检测结构有电感式位移传感器、光栅式位移传感器,电容位移传感器以及它们之间的组合检测单元。
3.3 复位机构
测头的复位机构是在测头中安装一个机构,这个机构使得测头在测量结束后测头能够恢复原来的平衡位置,测头的常用复位机构有,弹簧式复位机构、片簧式复位机构、磁铁复位机构。
3.4 轴锁定机构
测头的锁紧机构是在测头需要在只是用某个方向的测量而不需要其他方向的移动,这样就需要将测头的其他方向的移动锁死。常见的锁紧机构有弹簧V型槽锁紧机构、气压锁紧机构。
4 结论
通过对国内外技术对比以及对测头的设计原理、基本组成单元的研究,我们可以看出国外在测头的研究上比我国起步早,同时测头的测量精度高、扫描速度快,已经形成了很多专业生产的公司,如英国的Renishaw公司、德国的Carl Zeiss公司、Klingelnberg公司做到了商业化与标准化,而我国只是在一些研究机构和高校才研究与制造此类测头,无法达到商品化生产,企业坐标测量机上使用的多为进口而来,加大了生产成本,为此,我们需要在不断提高我国测头研制的创新能力和自主知识产权,使得测头研制与生产更加的成熟,最终实现商业化的生产,从而摆脱对国外的依赖。
[1]石照耀,韦志会.精密测头技术的演变与发展趋势[J].工具技术,2007,4(2):3-8.
[2]强怀博.高精度三维模拟测头的研制[D].西安:西安工业大学,2007.
[3]高翔,张国雄.一体化三坐标测头的研究[J].天津大学学报,2011,33(4):420-423.
[4]李平,晋小莉.平行簧片式三维模拟测头的设计[J].机械加工与自动化,2003,9(15):14-15.
[5]朱定见.三维整体切割的式测量头的研究[D].武汉:华中科技大学,2005.
[6]周广才.新型加转多维测头:中国,CN2793683Y[P].2004-4-28.
[7]邵文远.一种3维接触测量探头:中国,CN2854505Y[P].2007-01-03.
[8]强怀博,王建华,吴琼.基于柔性铰链结构的三维模拟测头设计[J].现代电子技术,2007,(1):102-103.
[9]刘芳芳,费业泰,夏豪杰.纳米坐标测量机的三维接触式测头机构[J].纳米技术与精密工程,2011,9(3):249-252.
[10]祝强,王洪喜,王建华.具有恒定测量力的一维扫描测头机构:中国,CN102155902[P].2011-10-05.
[11]周广才.双杠杆式数字测头,中国,CN102589436[P].2012-07-08.
[12]陈红芳,石照耀,郑智伟.一种扫描式测头测量装置:中国,CN102538678[P].2012-07-04.
[13]石照耀,胡洪平.一种接触式三维扫描测头:中国,CN103344197[P].2013-10-09.
[14]陈晓怀,陈贺,王珊,李瑞君,高伟.微纳测量机测头弹性结构的参数设计[J].光学精密工程,2013,21(10):2587-2592.
[15]亢建兵.一种测量力恒定可控的接触式扫描测头:中国,CN202780716[P].2013-03-13.
[16]仇谷烽,崔旭东.一种接触式扫描测头:中国,CN203929035[P].2014-11-05.
[17]Mc Murtry,David R.Measuring apparatus:England,US4078314[P].1976-05-10.
[18]Roger,Michael J.Position sensing:Germany,US4523383[P].1985-08-16.
[19]Otto klingler,kurt. Sensing Head for a Measuring Machine:Germany,US4660296[P].1987-04-28.
[20]Breyer,Karl-Hermann,Stuttgart.Probe Head for a Coordinate-measuring Instrument:Germany,US4882848[P].1989-11-28.
[21]Fritz Ertrl,Schweinfurt.Multiple-coordinate Measurement Sensor:Germany,US5029398[P].1989-11-28.
[22]Renishaw Electrical Limited.Contact-sensing Probe:England,US5074052[P].1991-12-24.
[23]Mc Murtry,David R,Wright.Measuring Probe:Enland,US5345689[P].1994-09-13.
[24]Ulbrich,Klaus.Probe,Motion Guiding Device,Position Sensing Apparatus,and Position Sensing Method:Belgium,US5353510[P].1994-10-11.
[25]Sheldon,Paul C.Three-axis Probe:America,US5836082[P].1998-11-17.
[26]Mies,Georg.Universal Scanning Head for Gear Measurements:Germany,US6131300[P].2000-10-17.
[27]Jean-PhilippeB.,BottinellS.,Jean-MarcBreguet. Delta3:Design and Control of a Flexure Hinges Mechanism[J].Intelligent Systems & Advanced Manufacturing,2001,(4568):135-142.
[28]Maurice F.,Breguet J.,Meli F.Touch Probing Device:Switzerland(CH),US6886265B2[P].2004-06-08.
[29]Meli F,Kung A,Thalmann R.Ultra Precision Micro-CMM Using a Low Force 3D Touch Probe[M].Proc.of.SPIE,2005.
[30]Renishaw 领导测头革命[Z].WMEM展会信息,2007,4(2).
[31]Renishaw SP80测头[Z].2008.
[32]薛永红.基于DELTA机构三自由度并联数控试验台的基础研究[D].天津:河北工业大学,2010.
[33]Kim H S,Tsai L W.Design Optimization of a Cartesian Parallel Manipulators[J].J.of Mechanical Design,125 (1):43-51.
[34]郜峰.3-DOF平动正交并联机器人的性能分析与研究[D].秦皇岛:燕山大学,2010.
Key Technology Research of Precision Contact Scanning Probe Mechanical System
L I Weiwei1, LI Yaning1, BAI Wei2
(1.School of Mechano-Electronic Engineering Xi'an Technological University, Xi'an710000;2.At Changqing Oilfield third oil, Xi'an 710021)
The development of precision measurement technology as an important symbol of modern industrial development, designing and manufacturing standards of its probe directly restricts the development of coordinate measuring machine. Contact scanning probe as a typical representative, it has high accuracy, stable performance, high measurement efficiency advantages, is widely used in the manufacture of sophisticated detection and line detection. Therefore, the key technologies to the scanning probe guide mechanism, displacement detection means, resetting institutions are our future research priorities.
precision measurement,scanning probe,guiding mechanism,reset mechanism,detection means
