外骨骼机器人半径轮绳轮驱动技术研究
2016-08-16宋遒志
王 宇,宋遒志
(北京理工大学机电学院,北京100081)
外骨骼机器人半径轮绳轮驱动技术研究
王宇,宋遒志
(北京理工大学机电学院,北京100081)
通过倾角计测得人体抓举重物过程中肘关节和肩关节的角度变化曲线,在SolidWorks中建立上肢三维模型,运用ADAMS仿真计算出抓取重物时的关节力矩,设计得到变半径绳轮的外形轮廓坐标。在相同条件下对比等半径轮驱动时所需要的功率,变半径轮绳轮驱动方式具有有效节能的优点。
外骨骼机器人动力学绳轮驱动凸轮
0 引言
外骨骼机器人实质上是一种可穿戴机器人[1-3]。外骨骼机器人关节驱动技术是外骨骼机器人研制的核心技术,是外骨骼机器人能否完成对人体抓举重物进行合理助力的关键性技术。外骨骼机器人的驱动结构主要包括液压缸直接驱动结构、电机带动滚珠丝杠、减速器驱动结构、气动人工肌肉驱动结构以及绳轮驱动结构[4]。本文主要的研究对象为绳轮驱动结构。
绳轮驱动结构能够通过绳索把动力传到外骨骼机器人的各个关节,它具有精度较高,运动灵活的特点,能减轻机械臂重量,提高机械臂负载能力,且具有一定的抗干扰能力。与传统驱动方式相比,它还有清洁、噪声小、制造维护费用低等优点[5]。鉴于以上优点国内外对绳轮驱动技术作了很多研究,例如:NIST、南洋理工大学、北京航空航天大学等都将绳轮驱动技术运用到机械手臂的驱动上。
关节驱动的结构形式对系统的控制策略、功率损耗都有重要影响。外骨骼机器人的动力元件一般为可移动电源,它承载的能量有限。合理的关节驱动结构能够提升能量的利用率,对外骨骼机器人的发展有着重要现实意义。本文通过分析外骨骼机器人抓举重物过程中力矩的变化规律,设计一种半径轮,并研究其对系统功率的影响。
1 关节驱动分析
1.1自由度分析
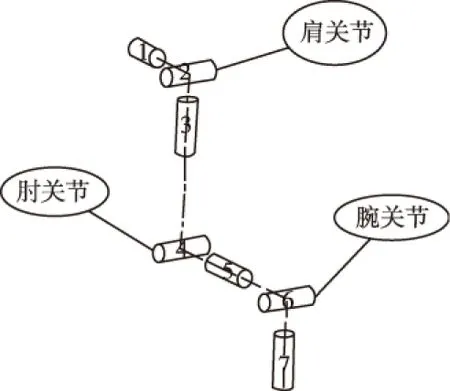
图1 自由度示意图
人体上肢的组成部分包括:肩部,上臂、肘部、前臂和手部。上肢的骨骼的关节主要有胸锁关节,肩关节、肘关节和手关节[6]。如图1所示,肩关节在人们日常活动中具有三个自由度,1、2、3分别为肩关节内收外展、屈伸和旋转;肘关节在日常生活中具有两个自由度,4、5分别为肘关节屈伸和内收外展;腕关节日常生活中具有两个自由度,6、7分别为腕关节左右旋转和上下旋转。考虑抓举的实际情况,我们只考虑肘关节两个自由度以及肩关节三个自由度。
1.2关节驱动方式选择
机器人关节处的液压驱动方式可分为四种形式:直接驱动方式、等半径驱动轮驱动方式、变半径轮驱动轮驱动方式和换向轮+驱动轮驱动方式。
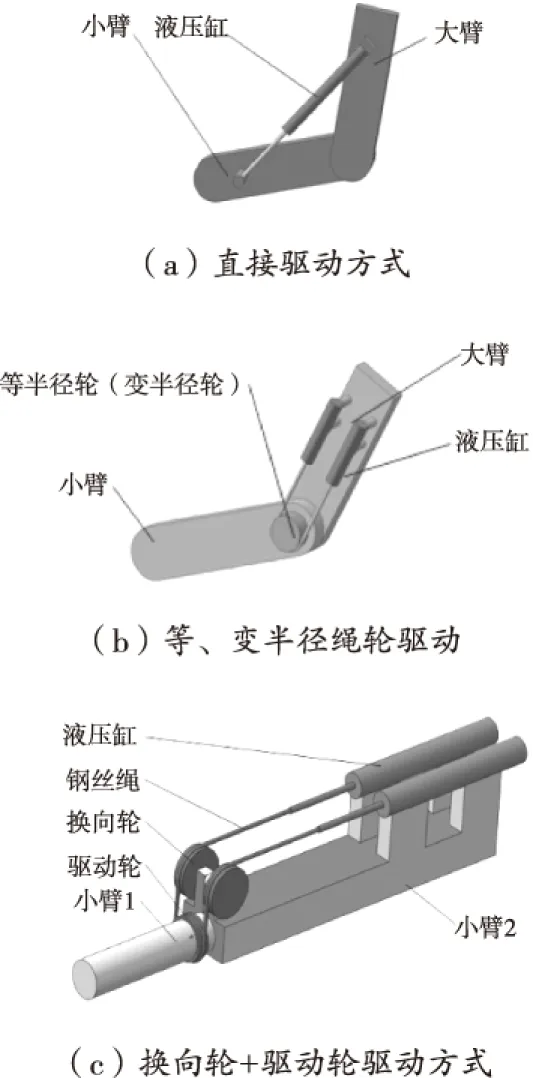
图2 驱动方式示意图
直接驱动方式如图2(a)所示,结构简单、重量轻、能量损失少,但是工作时存在死点、不能有效节能、控制难度大。等半径绳轮驱动和变半径绳轮驱动方式如图2(b)所示。与等半径轮驱动方式的不同之处是,变半径轮驱动方式所使用的驱动轮是凸轮或者偏心轮,其突出的优点是可以通过控制驱动轮的半径变化,产生所需要的不同力矩,可以实现有效节能。缺点是其结构复杂。考虑在抓取重物过程中,肘关节屈伸和肩关节屈伸所需要的力矩较大,而肘关节旋转,肩关节收展和旋转需要的力矩较小。在肘关节屈伸和肩关节屈伸这两个自由度上,采用变半径轮驱动方式。肩关节旋转和收展,肘关节旋转采用换向轮加等半径轮绳轮驱动方式(图2(c))。
本文主要对上肢外骨骼抓举重物时矢状面内的运动进行研究,所以只对变半径轮绳轮驱动结构进行分析。
2 动力学分析
2.1肘关节、肩关节角速度和角加速度的测定
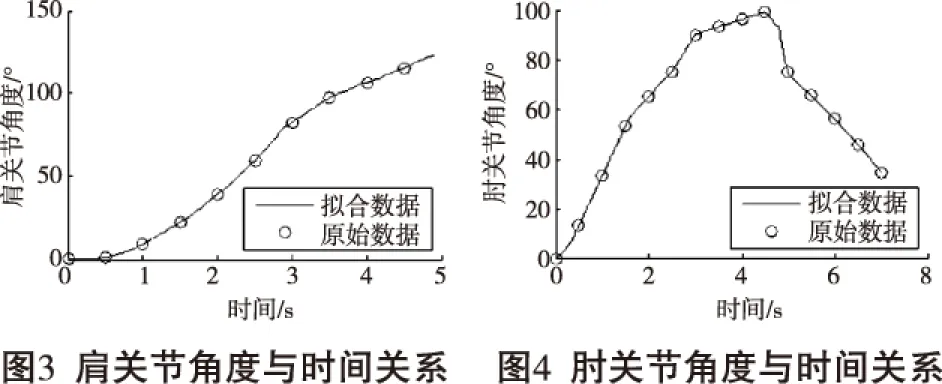
将两个倾角计固定在人上肢的大臂和小臂上,测量人在由低到高搬运重物时大臂、小臂与竖直方夹角度与时间的关系。测量20组数据对其取平均值。由于测量过程中人不可能保证上肢在矢状面内运动,为了减小误差,我们将测量得到的角度在矢状面内投影。肩关节、肘关节角度与时间的关系如图3、图4所示。将实验得到的离散点拟合成曲线。
2.2关节力矩计算
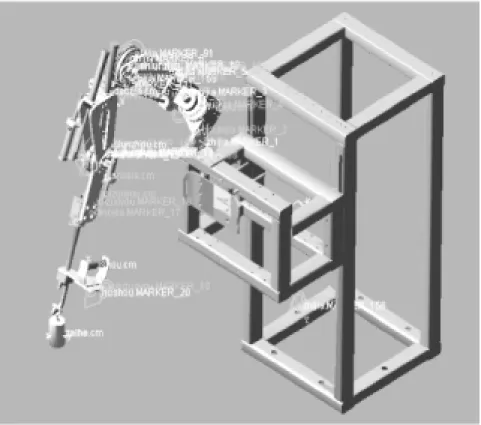
图5 ADAMS仿真模型
如图5所示,通过SolidWorks进行三维建模,将生成的三维模型导入ADAMS中。模型由支撑架部分、手臂部分以及负载部分组成。支撑架高度可以调节,可以适应1.6 m到1.9 m不同身高的人。大臂长400 mm,小臂部分(包含挂钩)长573 mm。负载55 kg。在ADAMS中仿真抓举55 kg的负载,仿真结果得到肩、肘关节所要的力矩。驱动函数由关节角度与时间的关系拟合而成。仿真结果如图6、图7所示。实线是ADAMS中仿真得到的力矩数据,虚线是MATLAB中7自由度多项式拟合结果。多项式拟合的函数与仿真曲线基本吻合,多项式拟合的函数代替仿真曲线,减少凸轮轮廓设计的计算量。
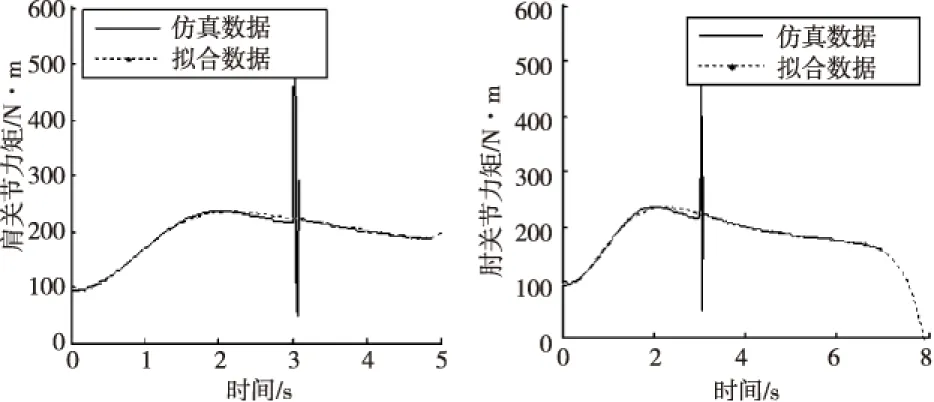
图6 肩关节力矩 图7 肘关节力矩
3 凸轮轮廓设计
得到了关节驱动力矩,通过解析法计算得到变半径绳轮的外形轮廓。变半径绳轮理论上讲就是凸轮,其设计过程如图8。
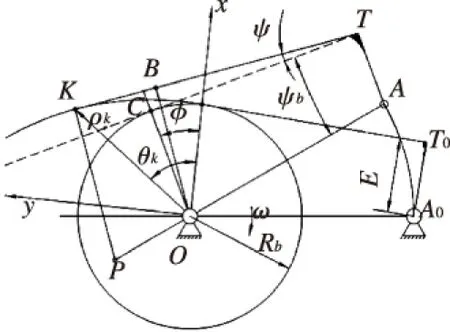
图8 凸轮轮廓计算
如图8所示,设凸轮的转角为φ时,平底线与凸轮轮廓相切于K点,对应的初始位置平底线(虚线)与基圆相切于C点。两平底线之间的夹角为从动件的对应角位移ψ。由O点作平底线的垂直线,相交于B点,则凸轮轮廓曲线上K点的极坐标矢量可由矢量三角形OBK确定[7-8]:
ρkeθk=LOBe(φ-ψ)+LBKe(φ-ψ+π/2)
(1)
其中矢量LOB、LBK的模为:
LOB=LOAsin(ψb-ψ)+E
(2)
LBK=LOPcos(ψb+ψ)
(3)
LOB为液压缸作用力对关节中心的力臂,由多项式拟合的力矩函数除以液压缸作用力得到。
公式中:
(4)
(5)
因此可得凸轮轮廓坐标计算式为:
(6)
在直角坐标系下,凸轮的坐标为:
(7)
由式(7)可以得到凸轮的坐标曲线如图9、图10所示。
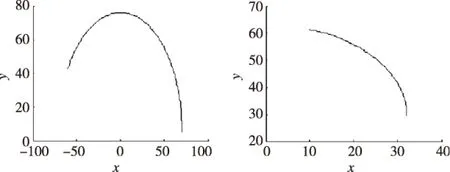
图9 肩关节凸轮轮廓 图10 肘关节凸轮轮廓
4 功率计算及对比分析
抓举过程中,小臂与大臂仅在经过肩关节并且平行于矢状面的平面内运动。不考虑肩关节收展及旋转运动和肘关节旋转运动。
以肘关节为例,计算抓举过程中,肘关节所需要的功率。外骨骼结构确定后,系统压强P压恒定,液压缸活塞面积A恒定,所以液压缸提供的最大力为F肘=P压A恒定。关节角速度为ω肘,肘关节变半径绳轮的回转半径为ρ肘,可以计算得到肘关节功率P肘。同理,可计算得到肩关节功率P肩。
计算得到等半径绳轮驱动和变半径轮绳轮驱动的肩关节和肘关节功率如图11、图12所示,实线为变半径轮的功率,虚线为等半径轮的功率。图11中,由于抓举过程中负载相对于肩关节的力臂变化较小,肩关节处,等半径绳轮驱动与变半径绳轮驱动所需的功率基本一致,能量节约效果不明显。如图12所示,肘关节处,等半径绳轮驱动方式与变半径绳轮驱动方式所需要的功率有明显差异,变半径绳轮驱动所需要的功率少于等半径绳轮驱动所需功率,实现有效节约功率。

图11 肩关节功率 图12 肘关节功率
5 结束语
通过以上分析研究,得到如下结论:
1)上肢外骨骼机器人采用变半径轮绳轮驱动结构对肘关节的功率影响明显,能够提升功率的利用率,节约系统能量。肩关节节能效果不明显。
2)分析了半径轮绳轮驱动结构在外骨骼机器人关节驱动结构上运用的可行性,对外骨骼机器人关节驱动技术研究有一定的借鉴作用。
[1]Deng M J, Wang Z, He H H, et al. Design and weight lifting analysis of a strengthen upper limb exoskeleton robot[J].Applied Mechanics and Materials, 2013(437):695-699.
[2]李会营,王惠源,等.外骨骼机器人发展趋势研究[J].机械工程师,2011(8):9-10.
[3]杨智勇,张静,归丽华,等.外骨骼机器人控制方法综述[J].海军航空工程学院学报,2009,24(5):520-526.
[4]杨正东,沈强,王人成.外骨骼关节驱动机构设计方案的模糊综合评价:第八届北京国际康复论坛论文集[C].中国康复理论与实践,2013(9):915-921.
[5]顾镇兵,程涛.外骨骼负重机器人液压缸的设计[J].机械与电子,2012(7):77-80.
[6]Martinez F, Retolaza I, Pujana-Arrese A, et al. Design of a five actuated DoF upper limb exoskeleton oriented to workplace help[C]// 2008 2nd IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics. Scottsdale:IEEE, 2008:169-174.
[7]刘昌棋,牧野洋,曹西京.凸轮机构设计[M].北京,机械工业出版社,2005:9-14.
[8]石永刚,吴央芳.凸轮机构设计与应用创新[M].北京,机械工业出版社,2007:111-112.
Sheave drive technology of exoskeleton robots
WANG Yu, SONG Qiuzhi
In this study, we measured the angle change of human elbow and shoulder joints when lifting heavy weights by inclinometer, established the 3D model of human upper limbs in SolidWorks, calculated the joint torque when lifting heavy weights by ADAMS simulation, and obtained the contour coordinates of the variable-radius sheave. Under the same conditions, the variable-radius sheave is more energy efficient than the equal-radius sheave.
exoskeleton robot,dynamics,sheave drive,cam
TH122
A
1002-6886(2016)04-0010-04
王宇(1989-),男,内蒙古包头市人,北京理工大学机电学院在读硕士研究生,研究方向为外骨骼助力机器人。
2015-12-24
