民用飞机仪表自动着陆系统控制律设计
2016-08-16陈磊
陈 磊
民用飞机仪表自动着陆系统控制律设计
陈 磊
本文对基于仪表的自动着陆技术进行了研究,以波音747飞机为对象,分别对自动着陆系统纵向以及横侧向控制律进行了设计,运用MATLAB软件得到了自动着陆系统仿真软件,该仿真软件的构建及分析结果为自动着陆系统技术的进一步研究提供了思路和参考,可应用于工程实际。
民机的进近着陆阶段是事故多发阶段,也是最复杂的飞行阶段。由于这一阶段飞行高度低,所以,对飞机安全的要求也最高,尤其在终端进近时,飞机的所有状态都必须高精度保持,直到准确地在一个规定的点上接地。对民机着陆,目前世界上主要有仪表着陆系统、微波着陆系统、全球定位系统三种方式。
仪表着陆系统目前发展比较成熟,但存在着智能提供单一而又固定的下滑道、波束覆盖区小、多径干扰严重等缺点;微波着陆系统主要优点是导引精度高、比例覆盖区大,能提供各种进场航线和全天候导引功能,但造价高,地面和记载设备要求高,换装代价较大,发展受到限制;GPS是美国军方研制的卫星导航系统,是继惯性导航之后,导航技术的又一重大发展,具有全球、全天候定位能力、军用信号定位精度高、应用范围广和相对造价低的优点,但也存在由于受到人为干扰时误差较大的缺点。
本文对仪表自动着陆系统进行了控制律设计,由于在着陆阶段,飞机的高度和速度变化范围较小,因此采用小扰动方法将飞机的非线性运动方程进行线性化处理,从而利用简化后的线性模型进行运动分析和控制律设计。另外由于飞机自身的对称性,在进行线性化过程中可以将纵向和横侧向进行解耦,分别进行控制律的设计,最后通过综合验证,完成自动着陆系统的控制律设计。
仪表纵向自动着陆控制律设计
纵向自动着陆控制律包括内环电传增稳控制和外环俯仰角控制、下滑着陆航迹控制,同时需要控制发动机调节速度,所以纵向仪表自动着陆控制为姿态和航迹的综合控制。设计时需要先设计电传增稳控制律,保证飞行稳定和驾驶员操纵的飞行品质,再设计俯仰角跟踪回路以及纵向航迹跟踪保持控制回路。纵向自动着陆系统结构框图见图1所示。
(1)内环纵向电传增稳控制系统
由于飞机在高速飞行时,乘客主要感受法向过载的变化,而在低速飞行时,主要感受俯仰角速率的变化,因此在考虑纵向飞行品质时,采用C*准则,即综合考虑飞机的法向过载和俯仰角速度进行内环电传纵向增稳的设计。纵向电传增稳控制采用C*显模型跟踪进行最优二次型设计,该设计兼顾了飞机的操作品质和乘客舒适性,满足了飞行品质的要求。包含全状态反馈的闭环控制增稳系统结构框图见图2所示。
(2)俯仰角跟踪控制系统
俯仰角跟踪控制系统用于对飞机俯仰角进行控制,能够根据飞行状态的需要将飞机保持在给定的俯仰角。作为飞机纵向航迹控制的内环,其性能是保证自动着陆各阶段航迹精确跟踪的基础,应实现对俯仰角指令快速、平稳的跟踪。俯仰角跟踪控制系统以纵向电传控制增稳系统作为内环进行设计,采用了比例积分控制,结构框图见图3所示。
(3)速度保持与控制系统
飞机在自动着陆过程中,需要精确控制着陆速度,应采用自动油门系统实现速度保持与控制。着陆航迹偏差通过升降舵来进行修正,而自动油门系统主要用来补偿着陆航迹跟踪过程中带来的速度偏差,使速度保持在规定范围内。速度保持与控制系统结构框图见图4所示,采用了比例积分控制。
(4)定高控制系统
飞机自动着陆初始阶段即为定高阶段,定高环节采用俯仰角控制环节作为内环,对给定高度指令进行跟踪,当偏离指定高度时,飞机会自动调节飞行姿态,爬升或下降到指定飞行高度。飞机定高平飞至截获下滑波束后转入下滑控制阶段。定高控制系统以俯仰角控制为内环,反馈高度信号进行控制,其结构框图见图5所示。

图1 纵向自动着陆系统结构框图
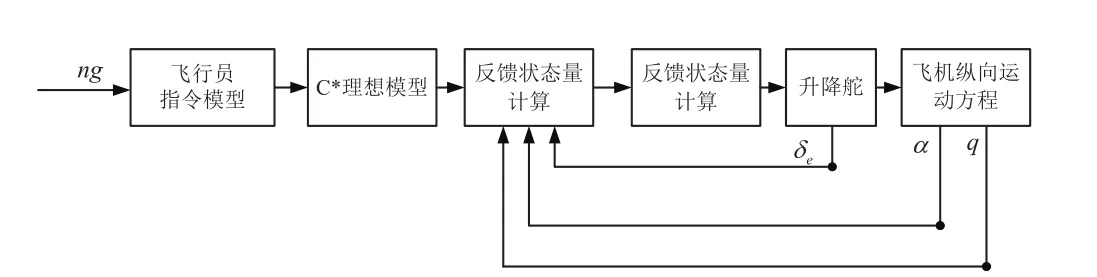
图2 纵向电传增稳系统结构框图

图3 俯仰角姿态控制系统结构框图
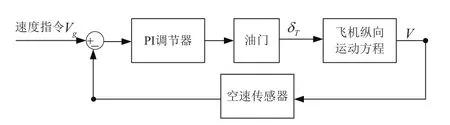
图4 速度保持与控制系统结构框图

图5 定高控制系统结构框图
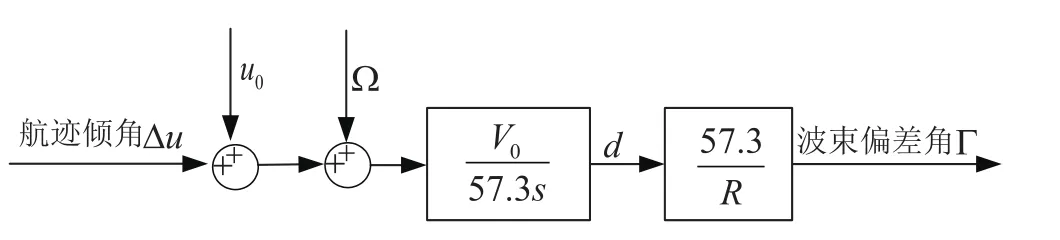
图6 航迹倾角和波束偏差角间的运动学关系示意图

图7 下滑耦合控制器结构简图
(5)下滑波束导引系统
飞机着陆截获下滑波束后,开始进入下滑线跟踪阶段。下滑波束导引系统通过建立航迹倾角Δu 与波束偏差角Γ的关系,构建对应反馈控制环节,使飞机在下滑阶段能够自动修正偏差,精确跟踪下滑线。
本文设定下滑波束线的仰角为3度,航迹倾角Δu 和波束偏差角Γ间的运动学关系见图6所示。
下滑波束导引系统以俯仰角控制系统为内回路,利用下滑耦合器调节飞机姿态,使波束偏差角最终为0。下滑波束导引系统下滑耦合器结构框图见图7所示。
(6)拉平控制系统
飞机在垂直平面内,从下滑过渡到实际着陆点的纵向运动轨迹称为拉平轨迹。自动着陆需要设计拉平控制律,将下滑时的垂直速度减少到允许的着地速度,使飞机平稳、安全接地。本文选取的拉平初始高度为15m,采用指数曲线设计拉平轨迹,公式为:

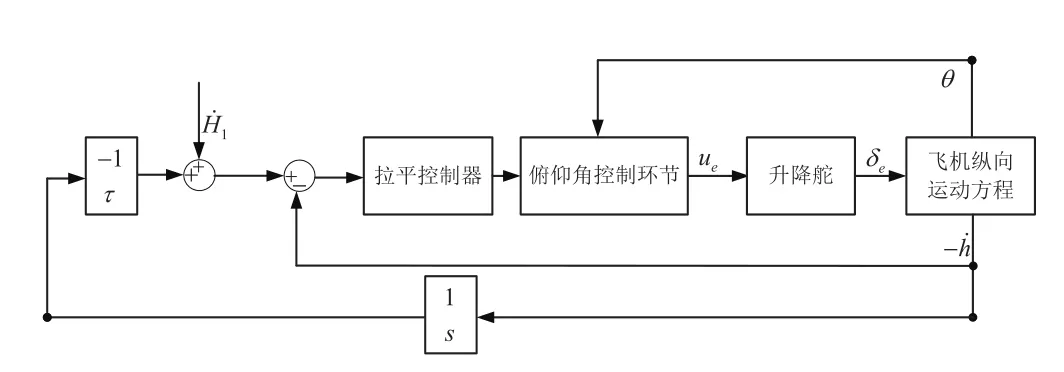
图8 自动拉平控制系统结构框图

图9 纵向自动着陆控制系统仿真模型
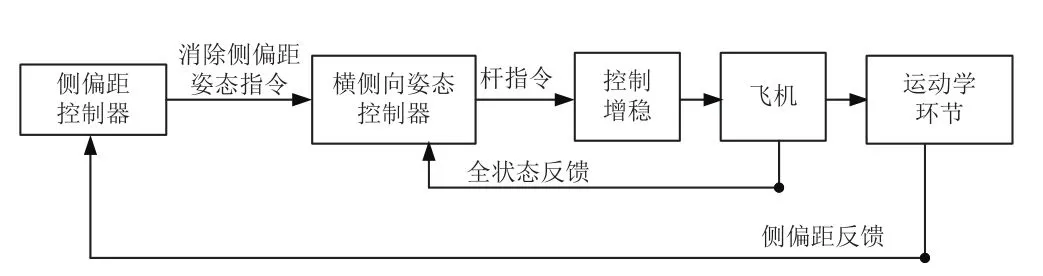
图10 横侧向自动着陆系统结构框图
拉平控制系统也采用俯仰角控制系统作为内环,通过改变姿态角来调整飞机的垂直下降速度,拉平控制系统结构框图见图8所示。
使用Matlab/Simulink软件对纵向自动着陆控制系统进行仿真建模,模型见图9所示。
仪表横侧向自动着陆系统控制律设计
横侧向自动着陆系统采用内环控制增稳、中环姿态控制和外环轨迹控制。在内环控制增稳回路的基础上,中环姿态控制回路跟踪飞机姿态控制指令;外环飞机侧偏距控制回路消除在飞机着陆阶段相对于跑道中心线的侧偏距,横侧向自动着陆系统结构框图见图10所示。
(1)横侧向增稳控制
横侧向增稳控制主要是从增强稳定性和使滚转角与侧滑运动解耦的角度进行设计,包括增稳控制以及前馈控制,横侧向增稳控制结构框图见图11所示。
本文采用特征结构配置方法通过侧滑角β、滚转角速率p 、偏航角速率r和滚转角φ反馈信号产生副翼和方向舵指令,以使飞机具有良好的飞行品质。前馈控制用来实现飞机对驾驶员指令信号的快速跟踪以及滚转与侧滑运动的静态解耦。
(2)横侧向姿态控制
横侧向姿态控制的基本要求是实现滚转角和偏航角的快速、精确跟踪,采用模型跟踪最优二次型设计方法进行横侧向姿态控制,其结构框图见图12所示。

图11 横侧向增稳控制结构框图
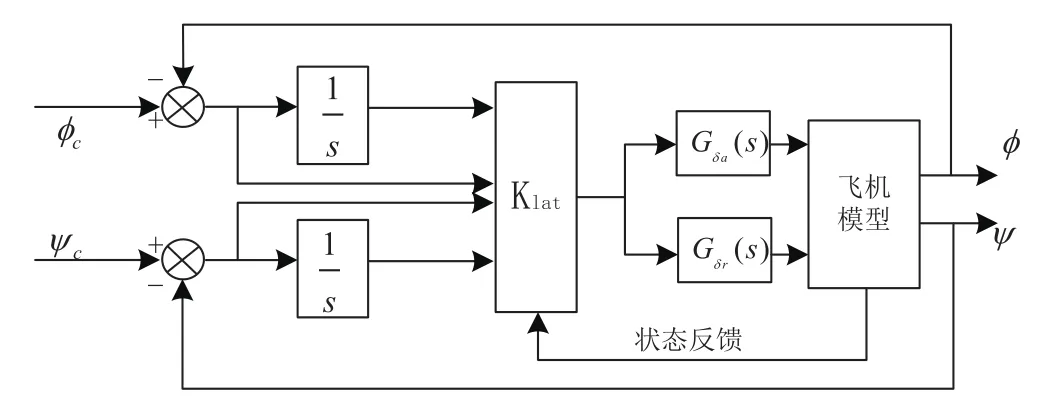
图12 横侧向姿态控制系统结构框图

图13 飞机侧向运动参数和波束偏差角的关系结构图
(3)侧向波束导引系统
侧向波束导引系统是将飞机偏离航向信标台发射的无线电波束中心线的信号通过耦合器变为滚转控制指令,输给自动驾驶仪的侧向通道,操纵副翼偏转来改变航迹方位角χ,修正飞机水平方向上的航迹。即侧向波束耦合器与自动驾驶仪侧向通道耦合,构成侧向波束自动控制系统,自动修正飞机水平方向上的航迹,使飞机对准跑道中心线飞行。
首先建立飞机侧向运动参数与波束偏差角λ之间的几何关系,见图13所示。
图中:ψ为飞机纵轴偏离给定航向的偏航角;β为侧滑角;y 为机偏离等信号线的侧向偏离;R为机重心到航向信标台的距离;λ为离波束等信号线的偏差角。
侧向波束耦合器是将波束偏差角信号转换为滚转指令信号的装置,其控制律为PID控制,公式为:

偏差角信号是使飞机稳定在高频无线电波等强度线上的基本信号,积分信号用来消除静差,角速率信号用来改善稳定性。综上分析,侧向波束导引系统结构框图见图14所示。
使用Matlab/Simulink软件对侧向自动着陆系统进行仿真建模,模型见图15所示。
仿真与分析

图14 侧向波束导引系统结构框图

图15 侧向自动着陆控制系统仿真模型

图16 自动着陆系统仿真软件
利用Matlab/simulink建模的自动着陆控制律模型软件对B747飞机的自动着陆过程进行仿真,采用Matlab/GUI搭建的自动着陆系统仿真软件界面见图16所示。
在自动着陆系统仿真软件界面中设置飞行初始条件、环境参数及控制参数,然后点击开始仿真按钮运行仿真模型,本次设置的参数见表1所示。

表1 飞行参数设置
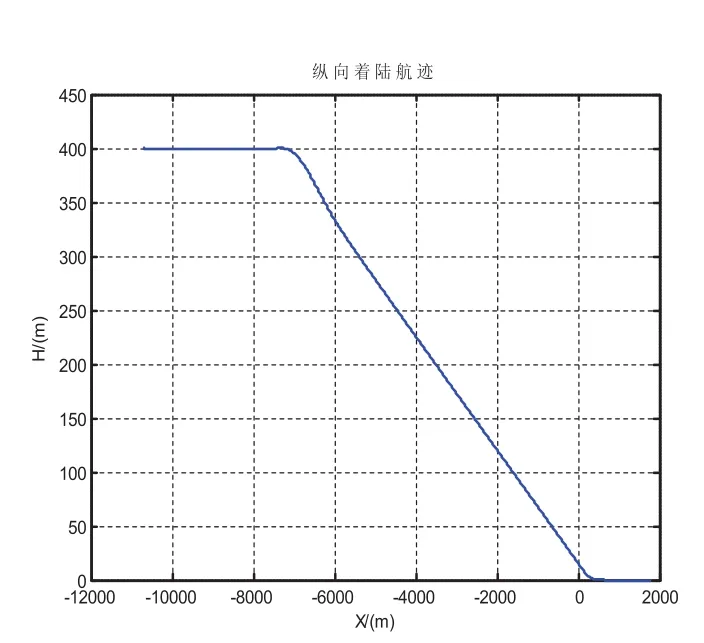
图17 纵向着陆轨迹

图18 横侧向着陆轨迹

图19 三维着陆轨迹

图20 飞机沿机体坐标系X轴方向分量

图21 飞机沿机体坐标Y轴方向分量

图22 飞机沿机体坐标系Z轴分量

图23 滚转角
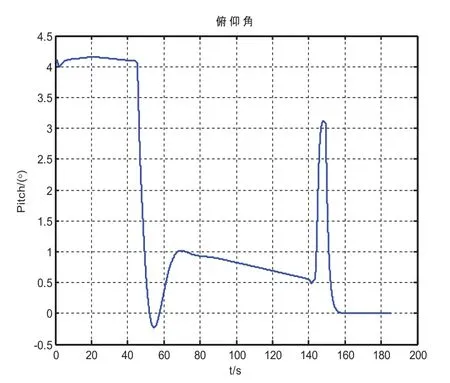
图24 俯仰角

图25 偏航角
自动着陆仿真曲线见图17至图25所示。
从上述飞机着陆曲线可以看出,所设计的自动着陆控制律可以实现飞机对理想着陆轨迹的精确跟踪。整个着陆过程中滚转角、俯仰角、偏航角变化值都不大,且振荡次数很少,飞机姿态变化平稳,对于民机来说,具有较好的乘坐舒适性。飞机接地时,俯仰角为3度,主轮先接地,符合实际着陆情况。
另外在定高段和下滑段,采用自动油门系统进行速度保持,因此能够将飞行速度控制在75m/s左右,图中显示速度控制误差范围不超过1m/s。在拉平段飞机适当减速,由75m/s平稳过渡到72m/s,确保飞机平稳、安全的着陆。
结语
本文对基于仪表的自动着陆技术进行了研究,以波音747为对象进行了自动着陆控制律的设计,通过仿真验证了所提出的自动着陆系统控制律结构合理性与控制性能。仿真验证结果表明,本文所设计的自动着陆系统控制律能够保证较高精度的航迹跟踪,能够实现飞机安全、平稳的接地着陆,控制响应过程平缓,使飞机具有良好的乘坐品质和操作性能。


陈 磊
上海飞机设计研究院
陈磊,男,硕士研究生,上海飞机设计研究院飞机设计师,研究方向为工程模拟器和飞行仿真技术。
10.3969/j.issn.1001-8972.2016.09.008
