结构多目标拓扑优化目标函数构建方法的研究
2016-08-16张璟鑫
张璟鑫 梁 伟 夏 洋
重庆交通大学,重庆,400074
结构多目标拓扑优化目标函数构建方法的研究
张璟鑫梁伟夏洋
重庆交通大学,重庆,400074
为实现结构材料的多目标拓扑优化设计,基于数学规划法提出一种广义的平均距离法,用以研究多目标拓扑优化目标函数的构建方法。介绍了运用平均距离法演变的将多目标转化为单目标的多种方法,并以汽车悬架控制臂为实例,应用演变的多种方法进行拓扑优化仿真研究。研究表明:运用平均距离法演变的多种方法可以灵活地构建多目标优化目标函数,基于所构建的目标函数可以寻找较优的构建方法,更好地将平均距离理念应用于多目标结构优化设计。
平均距离法;目标函数;多目标; 拓扑优化
0 引言
结构拓扑优化设计是优化设计领域最富有生命力、最具有发展前景的一个研究方向[1-2]。人们需要在结构优化设计领域中,寻找优化设计的最优方案或较优方案来解决单目标优化设计问题。然而在实际工程设计问题中,设计方案存在多项设计指标,期望其各指标达到最优,而这些指标往往难以协调,需要权衡多个目标来解决多目标问题,因此研究寻求合理解决多目标的拓扑优化优化问题的方法具有更重要的意义。
结构拓扑优化中以多工况静态柔度最小化及多阶动态频率最大化为目标函数构造问题是典型的多目标优化问题[3]。人们多引入数学规划来对多个目标进行综合权衡进而将多目标转化为单个目标来构造目标函数,最终建立优化数学模型。孙晓辉等[4]引入数学规划法相关理论建立了5种不同的目标函数,并得到既能提高动态振动固有频率又能提高结构刚度的拓扑构型。范文杰等[5]建立以折衷规划法定义柔度并结合平均频率特征值公式构建的多目标优化目标函数,并将函数应用于汽车车架结构的设计中,既提高了动态振动频率,又提高了结构刚度。占金青等[3]分别定义静态多工况刚度和动态特征值为两个分目标的目标函数,并以综合柔度最小化和平均频率特征值最大化为目标对算例进行多目标优化,验证其提出该数学模型的可行性。刘林华等[6]将折衷规划法与理想点法结合起来,分别以综合柔度、频率特征值最优化构造了目标函数,并以某越野车车架为例验证了多目标拓扑优化目标函数构建方法的正确性。显然,如何建立合理的目标函数是实现结构多目标优化的关键。 本文将平均距离理论引入结构多目标优化,归纳了将多种多目标转化为单目标的方法,并运用于拓扑优化来构建目标函数,对车架控制臂进行拓扑优化;针对拓扑优化结果,验证该优化方法的可行性,为多目标结构优化设计提供了新的设计思路。
1 广义平均距离公式
Ma等[7]在1995年提出的平均特征值公式很好地解决结构固有频率振荡问题,根据其平均特征值理念,提出广义平均距离公式概念:
其中,xni(i=1,2,…,m)是各个单目标数值,ni(i=1,2,…,m)为指定的单目标,wi(i=1,2,…,M)为加权系数(各目标对目标函数的贡献度),x0i(i =1,2,…,m)为给定的参数,p为给定的权力值,y0和α为任意常数(仅用于一些目标函数的物理意义和目标函数尺寸的调整)。
所构建目标函数的意义在于,将多个单一目标xni与给定参数x0i的距离之和转化为平均值y来定义评价函数,用来表征各目标加权距离的平均值,可以用取得平均值最大或最小的方法来实现各目标离指定点加权距离的最大化或最小化。
当p=1,2,…时,以目标函数最小化为例展开研究:


当p=-1,-2,…时,以实现目标函数最大化为例展开研究:

2 平均距离公式在结构多目标拓扑优化中的应用
在目前的结构多目标拓扑优化问题中,多工况柔度与多阶动态频率都属于多目标问题,因此两个多目标问题都应用平均距离公式来解决。
2.1静态多工况刚度拓扑优化数学模型
不同工况对应的最优拓扑结构不同,各工况对应的多刚度难以同时达到最优,因此,结合平均距离公式,以多工况下刚度最大化问题转化为柔度最小化的结构优化数学模型如下:
C=UTKU
s.t.ρ=(ρ1,ρ2,…,ρn)T
F=KU
0<ρmin≤ρk<1,k=1,2,…,L
式中,C(ρ)为结构平均柔度值;m为工况总数;wi为第i个工况柔度距离p次方的权重系数;ρ1,ρ2,…,ρn为拓扑优化设计变量,即通过变密度法得到的结构材料密度;L为单元总数;C为结构的柔度,F为受力;K为结构的刚度矩阵;U为位移向量; V0为设计区域原体积;V 为优化后的体积;Δ为体积分数。

令C0=0、α=1,以p=2、p=-1为例,将目标函数变换为
2.2动态频率拓扑优化数学模型
若简单地让其中某一阶频率达到最大,会使其他阶频率值降到比较低的值,从而导致几阶频率次序相互调换,这样会使目标函数发生频率振荡现象[7],因此为避免此现象并实现动态振动固有频率的最大化,结合平均距离公式得到
s.t.ρ=(ρ1,ρ2,…,ρn)T
ajτj≥fjj=1,2,…
(K-τjM)φj=0
0<ρmin≤ρk<1k=1,2,…,L
式中,f(ρ)为结构的平均固有频率值;l为固有频率总阶数;fj为结构的固有频率; M为系统的质量矩阵;φj为结构第j阶的正交特征向量;τj为结构第j阶的频率特征值;a=0.95。

2.3多目标拓扑优化的综合模型
由于柔度和频率的相互制约,而结构多目标优化的最终目的是实现各工况柔度最小化和各阶频率最大化,因此本文以权力值p=2为例,来实现两个定义的分目标最优。统一数量级,消除各自的量纲,可以得到最终的优化模型:
式中,C(ρ)max为平均柔度的最大值;C(ρ)min为平均柔度的最小值;f(ρ)max为平均频率的最大值;f(ρ)min为平均频率的最小值;C(ρ)0、f(ρ)0给定的值。
以列举的平均柔度和平均频率定义的两种目标函数为例,两两结合形成4种新的函数模型。
模型一:
模型二:
模型三:
模型四:
3 优化实例
本文以汽车悬架系统的控制臂为研究对象,以有限元软件Hyperworks为分析平台,参照文献[8]和文献[9],选择最为典型的制动、转向、过路面凹坑工况,建立了汽车控制臂的有限元模型;由于控制臂在有限元载荷计算中有累积误差,使得寻求一个完全平衡的外载荷力系的工作较困难[9],而且边界条件对计算结果有很大影响,因此本文采用惯性释放原理来减小该影响,从而使计算结果更合理,更接近实际情况。
材料弹性模量为210 GPa,泊松比为0.3,密度7.9×103kg/m3,体积分数约束为上限40%,拔模方向指定为z方向,载荷与约束如图1所示,其中A为载荷施加点,B为z方向的约束点,Fx、Fy、Fz均为1000 N。

图1 汽车悬架控制臂有限元模型
3.1优化过程


表1 单工况柔度优化结果 N·mm

表2 单阶固有频率优化结果 Hz
再以平均柔度和平均频率最优化分别得到C(ρ)min、C(ρ)max、f(ρ)min、f(ρ)max,结果如表3所示。
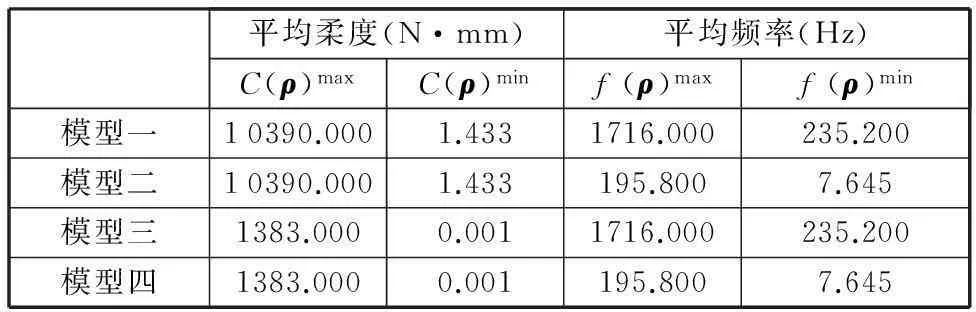
表3 以平均柔度和平均频率最优化的优化结果
最后将表1~表3的数值,分别代入4个总目标函数模型进行优化,得出最终优化结果。
3.2优化结果
(1)经过Optistruct迭代得到的拓扑构型都保留相对密度0.505的材料,以z轴正方向观察,如图2所示,其中空白区域为删除材料的区域。

(a)平均柔度最优 (b)平均频率最优 (c)模型一图2 模型一分目标和总目标拓扑构型的对比

(a)平均柔度最优 (b)平均频率最优 (c)模型二图3 模型二分目标和总目标拓扑构型的对比

(a)平均柔度最优 (b)平均频率最优 (c)模型三图4 模型三分目标和总目标拓扑构型的对比

(a)平均柔度最优 (b)平均频率最优 (c)模型四图5 模型四分目标和总目标拓扑构型的对比
通过图2~图5中各分目标和总目标拓扑构型的对比,4种多目标构型结合了两分目标构型,拥有比较多的三角形和X形结构,其性能优于单目标构型。
(2)控制臂的各工况柔度和各阶频率经过这4种模型优化的最终结果如表4、表5所示。
由表4和表5可知:4种多目标优化模型优化后使各工况柔度有很大程度的减小,也就是各工况刚度得到较大程度的提高;优化后结构各阶频率也都得到相应的提高;该4种模型都很好地实现了多工况柔度最小化和多阶频率最大化的目的;模型三优化结果要比其他3种好。

表4 优化前后各工况柔度结果对比 N·mm

表5 优化后各阶固有频率结果对比 Hz
(3)4种模型目标函数的迭代过程如图6所示。通过观察4种多目标函数的迭代历程可知:由于4种目标函数构造的不同,迭代次数及迭代结果不同,但迭代趋势都趋于稳定,最终趋于0;说明在迭代过程中,各工况柔度及各阶频率都在向各自的目标值发展,使得柔度越接近最小值,频率越接近最大值,平均距离越趋于最小值。

图6 4种模型拓扑优化迭代历程
4 结论
(1)本文将平均距离公式的基本理论与多目标结构优化相结合,基于4种构造的目标函数的拓扑优化结果可寻找较优的目标函数构建方法,从而使平均距离理念更好地应用于结构多目标拓扑优化。
(2)在多目标优化中,运用平均距离思想灵活地将距离的最大化转化为最小化来处理,通过优化结果的相互比较来有效的确定理想的结构拓扑构型,为设计者提供新思路,对于今后的实际工程优化问题有一定的指导意义。
(3)文中的平均距离公式可选择不同的参数,会演变不同的寻优方法,然而这种多样性同样增大优化过程的工作量,因此需对结构优化过程程序化,为拓扑优化模块及软件的开发提供了探索的空间。
[1]Bendsoe M P,Sigmund O.Material Inter-polation Schemes in Topology Optimization[J].Arch. Appl. Mech.,1999,69:635-654.
[2]Bendsoe M P,Sigmund O.Topology Optimization:Theory,Methodsand Applications[M].New York:Springer,2003.
[3]占金青,张宪民.连续体结构的静动态多目标拓扑优化方法研究[J].机械强度,2010,32(6):933-937.
Zhan Jinqing,Zhang Xianmin.Research on Static and Dynamic Multiobjective Topology Optimization of Continuum Struc-tures[J].Journal of Mechanical Strength,2010,32 (6):933-937.
[4]孙晓辉,丁晓红.结构多目标拓扑优化设计[J].机械设计与研究,2012,28(4):1-4.
Sun Xiaohui,Ding Xiaohong. The Topology Optimization Design of Multi-objective[J]. Machine Design and Research,2012,28(4):1-4.
[5]范文杰,范子杰,苏瑞意.汽车车架结构多目标拓扑优化方法研究[J].中国机械工程,2008,19(12):1505-1508.
Fan Wenjie,Fan Zijie,Su Ruiyi.Rsearchon Multi-objective Topology Optimizationon Bus Chassis Frame[J].China Mechanical Engineering,2008,19(12):1505-1508.
[6]刘林华,辛勇,汪伟.基于折衷规划的车架结构多目标拓扑优化设计[J].机械科学与技术,2011,30(3):382-385.
Liu Linhua,Xin Yong,Wang Wei. Based on Compromise Programming Frame Structure of Multi Objective Topology Optimization Design[J]. Mechanical Science and Technology Settings,2011,30(3):382-385.
[7]Ma Z D,Kikuchi N,Cheng H C.Topological Design for Vibrating Structures[J].Computer Methods in Appfied Mechanics and Engineering,1995,12(1):259-280.
[8]刘庆,侯献军.基于HyperMesh/OptiStruct的汽车零部件结构拓扑优化设计[J].装备制造技术,2008(10):42-44 .
Liu Qing,Hou Xianjun. Topology Optimization Design of Vehicle Components Based on HyperMesh/OptiStruct[J]. Equipment Manufacturing Technology,2008(10):42-44.
[9]祝小元,方宗德,申闪闪,等.汽车悬架控制臂的多目标拓扑优化[J].汽车工程,2011,33(2):138-143.
Zhu Xiaoyuan,Fang Zongde,Shen Shanshan,et al. Multi-Objective Topology Optimization for the Control Arm of Vehicle Suspension[J]. Auto-motive Angineering,2011,33(2):138-143.
(编辑郭伟)
Research on Construction Method of Objective Function for Multi-objective Topology Optimization in Structures
Zhang JingxinLiang WeiXia Yang
Chongqing Jiaotong University,Chongqing,400074
For multi-objective topology optimization of structural materials,this paper presented a generalized average distance method to study the objective function construction method of multi-objective topology optimization based on mathematical programming. Several methods using the average distance of the evolution were introduced to change multi objectives into single objective,and the topology optimization of a automobile suspension control arm was taken as an example by a variety of methods that were evoluted in the simulation research. The results show that:a variety of methods using the average distance method can flexibly construct the objective function of the multi-objective optimization,and find a way to make better the construction objective function .The average distance concept may be applied to the design of structure optimization for multi-objective topology.
average distance method;objective function;multi-objective;topology optimization
2015-05-20
TH114DOI:10.3969/j.issn.1004-132X.2016.07.009
张璟鑫,男,1989年生。重庆交通大学机电与车辆工程学院硕士研究生。研究方向为结构优化。梁伟,女,1968年生。重庆交通大学机电与车辆工程学院教授。夏洋,男,1989年生。重庆交通大学机电与车辆工程学院硕士研究生。
