电液比例式推进系统的自适应反演滑模控制
2016-08-01顾临怡罗高生陈宗恒
周 锋, 顾临怡, 罗高生, 陈宗恒
( 1.浙江大学 流体动力与机电系统国家重点实验室,浙江 杭州 310027; 2.广州海洋地质调查局,广东 广州 510760)
电液比例式推进系统的自适应反演滑模控制
周锋1, 顾临怡1, 罗高生1, 陈宗恒2
( 1.浙江大学 流体动力与机电系统国家重点实验室,浙江 杭州 310027; 2.广州海洋地质调查局,广东 广州 510760)
摘要:针对电液比例阀驱动的水下推进系统存在液压系统强非线性、易受外界温度压力以及水动力性能变化引起的参数不确定性的问题,提出一种自适应反演滑模控制方法.该方法结合实验辨识和自适应参数控制器设计方法分别对电液比例复杂耦合系统和不确定系统参数进行简化分析和在线估计,使用李雅普诺夫稳定性理论保证了系统全局渐近稳定以及系统状态的有界性.以国家发展高科技计划4 500 米级深海作业系统-“海马号”ROV的螺旋桨推进系统为研究对象,使用提出的控制方法与传统PID控制器进行对比试验.仿真和水池试验结果表明,所设计的自适应反演滑模控制器对参数变化以及未知外界干扰具有较强的鲁棒性,可以很好地跟踪螺旋桨转速参考轨迹,获得较好的稳态控制精度和动态性能;同时修正后的参数估计能够保证在外界未知干扰下估计参数的有界性.
关键词:电液比例阀;推进系统;参数自适应;滑模控制;反演控制中图分类号:
推进系统是水下无人遥控运载器(remotelyoperatedvehicle,ROV)控制系统的重要组成部分,其性能直接影响运载器的运动和作业能力.液压推进系统由于功率密度大,调速性能好,得到了广泛应用[1-3].然而液压控制系统是一个典型的非线性系统,不仅存在死区、磁滞、液动力、油液泄漏和阀芯摩擦等非线性因素,而且液压特征参数会随外界温度和压力波动而变化[4-5];螺旋桨推进器的水动力性能参数难以测量,易受海水密度、阻尼及洋流的影响.这些非线性和不确定性使系统的动态特性十分复杂,要建立系统的精确数学模型非常困难.
为减小电液比例阀的固有非线性对控制带来的影响,Vaughan等[6-7]提出了比例阀的集中参数模型,并通过实验测量或有限元分析确定各项参数;李其朋等[8]提出了一种新型双向比例电磁铁结构,仿真和实验证明其具有良好的线性度和较小的滞环;此外,阀芯位移电反馈闭环的应用也在一定程度上能提高其动态性能[4].然而用于水下运载器的比例阀工作深度大(受高压),工况多变且状态难以测量,上述参数模型与改进型结构并不适用,这也对控制算法提出了更高的要求.
对螺旋桨推进系统的控制方法研究,目前已有许多重要成果.Yoerger等[9-10]将滑模控制和自适应滑模控制应用于螺旋桨推进器,并在JASON号ROV上得到成功应用.Bessa等[11]在滑模控制基础上增加了自适应模糊控制律,有效地减小了控制器输出的抖振,成功实现了ROV深度控制.Javadi等[12]将自适应滑模控制与神经网络算法相结合,实现了ROV高精度轨迹跟踪.然而上述控制算法大多针对电推进器,并不涉及液压型推进器存在的由未知比例阀模型结构和控制电流输入与推进器转速输出间不确定关系带来的控制问题.
本文介绍的电液比例式推进系统主要通过调节比例阀线圈电流来改变液压马达进出油口压差,最终实现推进器的扭矩和转速控制,在大功率ROV中得到广泛应用.该控制阀采用三通先导式溢流型比例减压阀,内部为间接压力反馈方式.其模型结构复杂,未知参数甚至可达几十个,而且大多都难以测量[13-14].针对上述控制问题,本文提出自适应反演滑模控制方法.该方法结合实验辨识和自适应参数控制器设计方法分别对电液比例复杂耦合系统和不确定系统参数进行简化分析和估计,使用李雅普诺夫稳定性理论保证了系统全局渐近稳定以及系统状态和有界性.以国家发展高科技计划4 500m级深海作业系统-“海马号”ROV的螺旋桨推进系统为研究对象,通过仿真和试验结果验证了控制方法的有效性和正确性.该控制系统已应用于“海马号”ROV,并于2015年3月协助地质学家在我国南海发现天然气水合物能源.
1电液比例式推进系统建模
应用在ROV上的电液比例式推进系统的安装结构和工作原理如图1和2所示.推进系统主要由恒压变量泵、比例阀控制阀箱和螺旋桨推进器组成.每套推进器马达都由成对的三通先导式溢流型比例减压阀控制,该阀能根据工况实现减压或溢流功能.其中马达进油口侧减压阀实现减压功能,马达出油口减压阀实现溢流功能,而马达的正反转由两边比例减压阀给定电流大小决定.由于所有比例减压阀的型号相同且推进器控制相互独立,本文仅以单套推进器控制系统作为研究对象.
如图3所示是三通式比例减压阀工作原理[15].图中ps为高压供油压力,p1为减压阀出口压力,p2为主阀芯负载敏感腔压力,p3为先导阀压力.由液阻R1、R2与先导阀阀口组成的液压半桥的作用,控制主阀芯运动以改变节流口面积,使减压阀出口压力保持恒定.该阀不是采用直接压力检测方式,而是通过p3与电磁力进行比较来控制先导液桥流量.

图1 4 500 m级作业型ROV及其推进系统Fig.1 4 500 m work-class ROV and its propulsion system
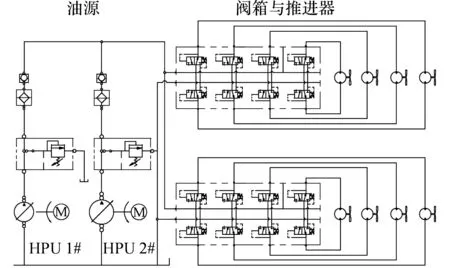
图2 液压推进系统原理图Fig.2 Schematic diagram of hydraulic propulsion system
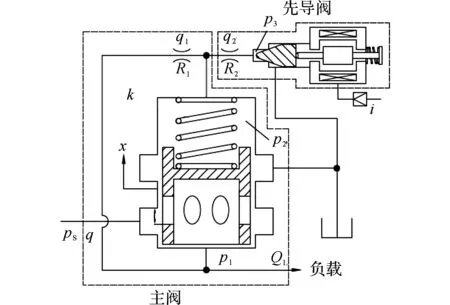
图3 减压阀工作原理图Fig.3 Schematic diagram of the pressure reducing valve
由孔口流量方程,p1、p2和p3存在以下关系:
p1=p2+fR1(q1)=p3+fR2(q2)+fR1(q1).
(1)
式中:q1为通过液阻R1的先导流量,q2为通过液阻R2的先导流量,fR1和fR2为液阻压力流量函数.
虽然p3可与线圈输入电流i相对应(忽略先导阀液动力与阀芯摩擦),但先导流量及其相关函数方程未知.为简化建模分析,可对减压阀作零流量阶跃响应动态测试和压降流量特性试验以辨识其模型,结果见图4和5.由图4可知,当无电流控制输入时,减压阀初始压力p10约为2MPa,这是由阀的液压半桥控制方式决定.图中阶跃响应无超调,可用以下一阶模型近似
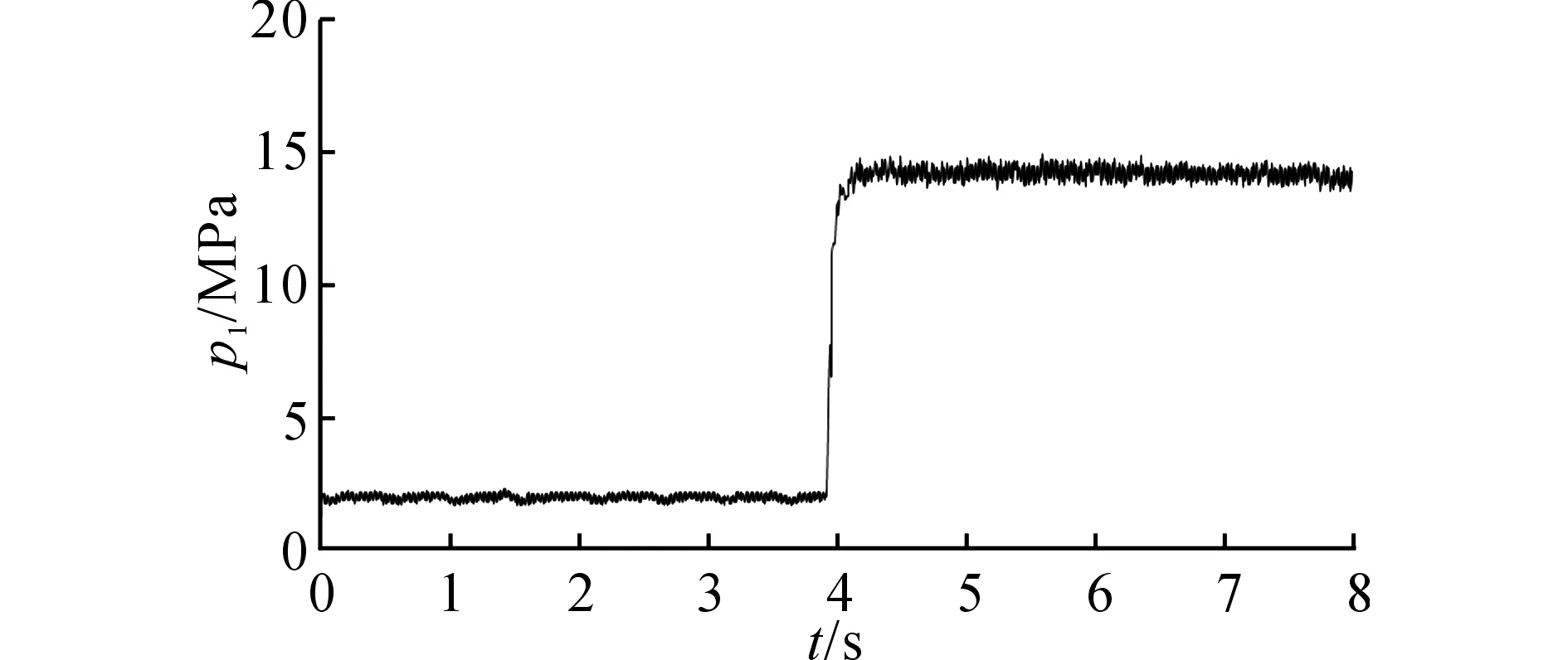
图4 减压阀压力阶跃响应Fig.4 Pressure step response of reducing valve
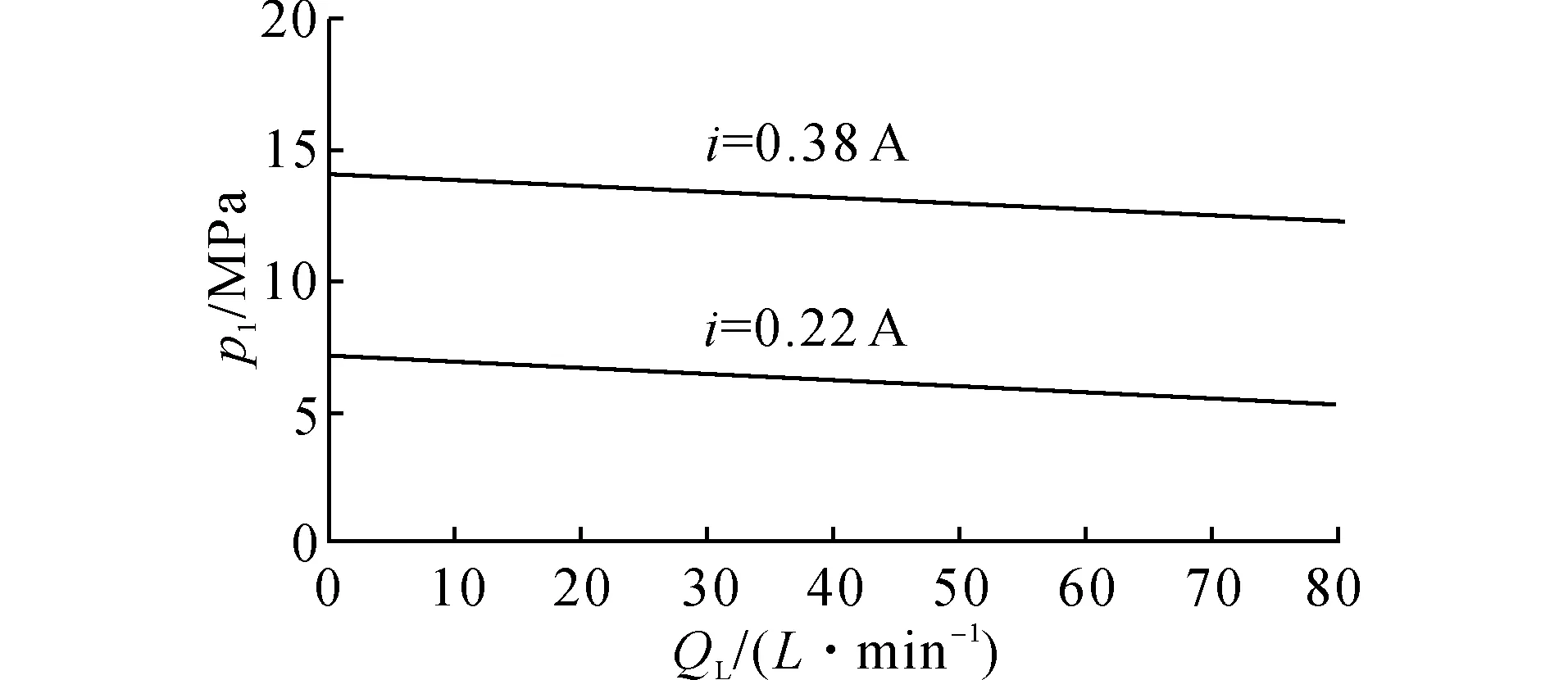
图5 减压阀压降流量特性曲线Fig.5 Pressure drop and flow characteristic of reducing valve
(2)
式中:Tp为一阶模型时间常数,Δp为减压出口压力增量,k为电流增益,i为控制输入电流,f1为比例阀滞环等非线性因素干扰项.
考虑阀的流量压降特性曲线,可得
p1=p10+Δp-k1QL.
(3)
式中:QL为负载流量,k1为压降流量系数.
由马达流量方程可得阀的负载流量:
QL=Dmω+Ctmp1.
(4)
式中:Dm为马达排量,ω为马达角速度,Ctm为马达泄漏系数.
将式(4)代入式(3),可得

(5)
导管螺旋桨推进器主要结构如图6所示,主要由液压马达、桨叶和导流罩组成.为提高推进器性能和缩减整体尺寸,液压马达不仅设计了加长型输出轴和机械密封结构,而且增加了内置测速齿轮.推进器的桨叶直径为406mm,在960r/min转速下可提供350kg的推力.
螺旋桨产生推力和负载扭矩均与转速平方成正比[16],考虑到马达及流体摩擦阻尼,因而推进器负载扭矩和推力可描述为
TL=KLω2+B0ω,
(6)
F=KTρn2D4=Cfω2.
(7)

图6 液压推进器结构Fig.6 Structure of hydraulic thruster
式中:TL为推进器负载扭矩,KL为螺旋桨扭矩系数,B0为推进器阻尼系数,F为推进器产生推力,KT为螺旋桨推力系数,ρ为水的密度,n为螺旋桨转速,D为螺旋桨直径,Cf为等效推力系数.
推进器驱动扭矩T由定量马达进出油口压差产生,其平衡方程为

(8)
式中:pb0为马达出油口压力,J为螺旋桨和马达转动惯量,Tf为外界未知不变或者慢变的扰动力矩,如负载扰动力矩和摩擦力矩等.
由式(8)可得输入输出控制方框图(图7).将式(5)、(6)代入式(8),经整理得到推进器模型:

(9)

(10)


图7 推进系统控制框图Fig.7 Control block of propulsion system
2自适应反演滑模控制器设计
对式(2)、(7)、(9)和(10)进行自适应反演滑模控制器设计,并通过李雅普诺夫函数给出系统模型参数的自适应律,使得当存在参数不确定和未知干扰时,保证系统的稳定性和跟踪性能.
在设计控制器时要用以下假设.

假设2比例阀非线性因素干扰项有界,满足
(11)
式中:h为已知正常数.
假设3转动惯量J、阻尼系数B、螺旋桨扭矩系数KL,以及扰动扭矩Tf是慢变量且有界.
1)以τ作为式(9)的虚拟控制;定义s为转速跟踪误差,即

(12)
选择李雅普诺夫函数

(13)
对上式进行求导,得

(14)
将式(9)代入式(14),可得

(15)
构造τ的期望控制律
(16)

定义虚拟控制误差:
(17)
将式(16)、(17)代入式(15),得

(18)



(19)
取误差系统的李雅普诺夫函数为

(20)
式中:ΓB、ΓK、ΓT、ΓJ为相应的正估计增益常数.


(21)
构造以下参数自适应率

(22)

(23)

(24)

(25)
将(22)~(25)代入(21),得

(26)


(27)
对式(17)求取时间导数,可得
(28)
将式(2)、(10)代入式(28),可得

(29)
i为实际的控制输入,可取以下的控制量

(30)
式中:λ为正控制常数,h为比例阀非线性因素干扰项边界.
将上式代入式(29),得

(31)
取系统的总李雅普诺夫函数为

(32)
对式(32)两边取时间导数,并将式(11)、(26)和(31)代入该方程,可得

(33)


(36)
由李雅普诺夫函数的时间导数为负定,可知V(t)≤V(0)且

(37)
式中:βmin和βmax为矩阵
定理1通过式(3)、(10)、(12)和(16)获得的控制律(30)作为控制输入,以(22)~(25)为参数自适应律时,电液比例式推进系统(2)(7)(9)(10)是全局渐进稳定的.
说明:
3)控制器中的马达转速ω、马达进口(减压阀出口)压力值p1和背压pb0均通过传感器测得,压力增量Δp可通过式(5)计算.
3仿真与试验研究
3.1仿真
在MATLAB/Simulink○R中建立“海马号”ROV液压推进控制系统的仿真模型,具体参数如表1和表2所示.
为验证控制方法在模型参数不确定以及电磁阀干扰时的控制效果,将表1中的螺旋桨参数KL和B0上下变动25%(正弦波动),并在比例阀滞环等非线性因素干扰项f1中增加幅值为1MPa的随机干扰噪声.而Tf仍使用常值,代表未知的常量摩擦力矩.

表1 液压推进系统的仿真参数

表2 控制系统仿真参数
仿真控制输入为周期为10s,占空比为50%,幅值为40rad/s的方波速度信号.为使螺旋桨转速参考轨迹连续可微(满足假设1)以及减小轨迹信号突变带来的影响,在控制信号中增加了3个串联的一阶惯性滤波器,滤波时间常数分别为100、20和20ms.
图8和图9所示为自适应滑模控制器与传统PID控制器的仿真结果对比(包括轨迹跟踪、跟踪误差和控制输入曲线).由仿真结果可知,两者均能较好地跟踪参考轨迹,但PID控制性能在螺旋桨加速过程时出现一定程度退化,误差显著增大,控制电流也出现较大波动.而自适应滑模控制器对参数不确定性以及外干扰有更好的鲁棒性能,具有满意的动态性能和稳态控制精度,控制电流输入也更为平滑.

图8 螺旋桨转速与误差跟踪曲线的仿真结果对比Fig.8 Simulation results comparison of thruster speed and tracking error

图9 控制输入电流的仿真结果对比Fig.9 Simulation results comparison of control current
3.2试验研究

图10 推进系统实验设备Fig.10 Experiment equipments of propulsion system
实验采用主频为2.8GHz的P4处理器和NI6221PCI数据采集卡,利用Matlab/Simulink®XPC实时操作系统进行实验.如图10所示,上图为由比例阀和推进器组成的推进系统本体(实验时推进器部分没入水中),下图为放大板和运行实时XPC内核的主机.
液压推进控制系统参数基本与仿真相同,可以根据实际控制的需要进行调整.需要说明的是,实验中参数估计容易受到其他外界未知干扰以及系统未建模动态的影响,从而使得自适应律(22)~(25)出现饱和现象,造成系统不稳定,因此需要根据实际参数的范围修正自适应参数估计律[20-21].
式(38)是以B的参数自适应律(22)为例的参数自适应律修正方法,其他参数自适应律的修正可以使用相同方法(参数上下界限见图11).
(38)

图11 螺旋桨转速跟踪曲线的试验结果对比Fig.11 Experiment results comparison of thruster speed tracking error
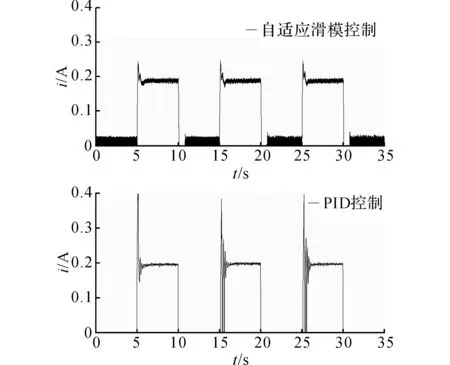
图12 控制输入电流的试验结果对比Fig.12 Experiment results comparison of control current
实验同时增加了常规PID控制进行对比,两者的控制效果如图11和图12所示.由实验结果可知,自适应反演滑模控制有更好的跟踪精度,在螺旋桨加速过程中控制输入相对平滑,这与仿真结果基本一致.在整个方波信号跟踪中小幅超调和误差主要是由于模型参数估计误差和转速传感器的测量误差引起.而当跟踪信号为零时,自适应反演滑模控制器存在的微小幅值输出是由于压力传感器的测量噪声引起,但并不影响比例阀的实际压力输出.实验中的PID控制参数由临界比例度法初步整定再进行微调,然而在保证稳态精度的前提下无法消除由液压螺旋桨从静止开始加速过程中引起的短暂转速波动.这一方面是由于液压马达静摩擦和液压阀死区的存在,另一方面是螺旋桨的阶跃响应容易激发液压推进系统模型的未建模动态[22].
图13是实验过程中的参数自适应曲线.KL估计和J估计虽然出现了短暂饱和现象,但仍能通过参数自适应律变化快速调整,使控制精度不受太大影响.综合比较2组实验结果可知,在真实系统存在的电磁滞环和静摩擦等外界因素影响下,自适应反演滑模控制器有更好的动态性能和稳态精度.

图13 B、KL、J、Tf参数估计曲线Fig.13 B、KL、J、Tf parameter estimates
4结论
(1)本文使用Backstepping控制器设计技术和李雅普诺夫稳定性理论,根据液压推进系统的实验特性和动力学方程,建立自适应反演滑模控制器,解决了液压型推进系统存在的由未知比例阀模型结构、模型参数不确定性以及控制电流输入与推进器转速输出间不确定关系(电磁滞环等影响)带来的控制问题,从理论上证明了控制器具有全局渐进稳定的性能,以及参数估计的有界性.
(2)将该控制器应用于国家高技术研究发展计划4 500米级深海作业系统-“海马号”ROV液压推进系统,并通过仿真和实验对比研究验证了控制器良好的跟踪性能和鲁棒性能.
(3)本文所提出的基于Backstepping的自适应滑模控制方法可以应用于具有转速和压力测量的阀控马达系统上.当液压马达存在频繁启停的工况时,该方法控制效果优于常规PID控制.
参考文献(References):
[1]DEWIJSB.AUV/ROVpropulsionthrusters[C]∥OCEANS2000MTS/IEEEConferenceandExhibition.Providence:IEEE, 2000: 173-176.
[2] 蒋新松.水下机器人[M].沈阳:辽宁科学技术出版社, 2000.
[3]LEABOURNEKN,ROCKSM,FLEISCHERSD.StationkeepingofanROVusingvisiontechnology[C]∥OCEANS97MTS/IEEEConferenceProceedings.HalifaxIEEE, 1997: 634-640.
[4] 吴根茂,邱敏秀.实用电液比例技术[M].杭州:浙江大学出版社,1993:2-9.
[5] 方锦辉,孔晓武,魏建华.伺服比例阀的非线性建模和仿真[J].浙江大学学报:工学版,2014,48(5): 784-789.
FANGJin-hui,KONGXiao-wu,WEIJian-hua.Nonlinearmodelingofvalidationofaservo-solenoidvalve[J].JournalofZhejiangUniversity:EngineeringScience, 2014, 48(5): 784-789.
[6]VAUGHANND,GAMBLEJB.Themodelingandsimulationofaproportionalsolenoidvalve[J].ASMEJournalofDynamicSystems,MeasurementandControl, 1996, 118(1): 120-125.
[7]CRISTOFORID,VACCAA.Themodelingofelectrohydraulicproportionalvalves[J].JournalofDynamicSystems,MeasurementandControl, 2012, 134(2): 108-120.
[8] 李其朋,丁凡,王传礼.耐高压双向比例电磁铁的研究[J].浙江大学学报:工学版,2006,40(2):322-325.
LIQi-peng,DINGFan,WANGChuan-li.Studyofhighpressurebi-directionalproportionalsolenoid[J].JournalofZhejiangUniversity:EngineeringScience, 2006, 40(2): 322-325.
[9]YOERGERDR,SLOTINEJJE.Robusttrajectorycontrolofunderwatervehicles[J].IEEEJournalofOceanicEngineering, 1985, 10(4): 462-470.
[10]YOERGERDR,COOKEJG,SLOTINEJJE.Theinfluenceofthrusterdynamicsonunderwatervehiclebehaviorandtheirincorporationintocontrolsystemdesign[J].IEEEJournalofOceanicEngineering, 1990, 15(3): 167-178.
[11]BESSAWM,DUTRAMS,KREUZERE.Depthcontrolofremotelyoperatedunderwatervehiclesusinganadaptivefuzzyslidingmodecontroller[J].RoboticsandAutonomousSystems, 2008, 56(8): 670-677.
[12]JAVADI-MOGHADDAMJ,BAGHERIA.Anadaptiveneuro-fuzzyslidingmodebasedgeneticalgorithmcontrolsystemforunderwaterremotelyoperatedvehicle[J].ExpertSystemswithApplications, 2010, 37(1): 647-660.
[13]YUNSM,YUNDW,KIMHB,etal.Proportionalpressurereducingvalveforclutchcontrolsystem[C]∥ControlAutomationandSystems.KINTEX:IEEE2010: 1200-1204.
[14]YAOGW,LINMY.Simulationresearchofproportionalpressure-reducingvalve[C] ∥AdvancedTechnologyofDesignandManufacture.Beijing: 2010:121-126.
[15] 周锋,顾临怡,罗高生.用于水下推进系统的先导比例减压阀的稳定性[J].浙江大学学报:工学版,2015,49(11): 2047-2053.
ZHOUFeng,GULin-yi,LUOGao-sheng.Stabilityofpilot-operatedproportionalpressurereducingvalveusedinunderwaterpropulsionsystem[J].JournalofZhejiangUniversity:EngineeringScience, 2015, 49(1): 2047-2053.
[16]HEALEYAJ,ROCKSM,MILESD.Towardanimprovedunderstandingofthrusterdynamicsforunderwatervehicles[J].IEEEJournalofOceanicEngineering, 1995, 20(4): 354-361.
[17]KRISTICM,KOKOTOVICIKP.NonlinearandAdaptivecontroldesign[M].NewYork:JohnWileyandSons, 2005: 21-25.
[18]SLOTINEJJE,LIWP.Appliednonlinearcontrol[M].EagleWoodCliffs:PrenticeHall,1991: 49-65.
[19]YAOBin.AdaptiveRobustControlofNonlinearSystemswithApplicationtoControlofMechanicalSystems[D].UniversityofCaliforniaatBerkeley, 1996.
[20]YAOBin.DesiredCompensationAdaptiveRobustControl[J].JournalofDynamicSystems,MeasurementandControl. 2009(131): 0610001-7.
[21] 罗高生,顾临怡,李林.基于鲁棒观测器的肘关节鲁棒自适应控制[J].浙江大学学报:工学版,2014,48(10): 1758-1766.
LUOGao-sheng,GULin-yi,LILin.Researchonrobustoutputfeedbackadaptivecontrolof7-functionhydraulicmanipulatorelbowbasedonrobustobserver[J].JournalofZhejiangUniversity:EngineeringScience, 2014, 48(10): 1758-1766.
[22]WHITCOMBLL,YOERGERDR.Preliminaryexperimentsinmodel-basedthrustercontrolforunderwatervehiclepositioning[J].IEEEJournalofOceanicEngineering, 1999, 24(4):495-506.
收稿日期:2015-06-19.
基金项目:国家“863”高技术研究发展计划资助项目(2008AA092301).
作者简介:周锋(1987—),男,博士生,从事水下机器人液压系统研究. ORCID: 0000-0002-4856-9015. E-mail: madzf@zju.edu.cn 通信联系人:顾临怡,男,博士,教授. ORCID: 0000-0001-5401-7324. E-mail: lygu@zju.edu.cn
DOI:10.3785/j.issn.1008-973X.2016.06.014
中图分类号:TP 273
文献标志码:A
文章编号:1008-973X(2016)06-1111-08
Adaptivebacksteppingslidingmodecontrolforelectro-hydraulicproportionalpropulsionsystem
ZHOUFeng,GULin-yi,LUOGao-sheng,CHENZong-heng
( 1. State Key Laboratory of Fluid Power Transmission and Control, Zhejiang University, Hangzhou 310027, China;2. Guangzhou Marine Geological Survey, Guangzhou 510760, China )
Abstract:A adaptive backstepping sliding mode control method was proposed based on the fact that underwater hydraulic propulsion system controlled by electro-hydraulic proportional valves has the control characteristics of strong nonlinearity of the hydraulic system, unknown hydrodynamic parameter, parametric uncertainties susceptible to temperature and pressure changes of the external environment. The controller combined with experimental identification method and the robust adaptive controller design method to analyse complex electro-hydraulic system and estimate unknown parameters. The globally asymptotic stability and boundedness of the controll system was guaranteed by using Lyapunov stability theory. Using the hydraulic propulsion system for the 4 500 m Deep-sea Working System as the research subject, a comparative study was conducted using the control method presented in this paper and PID controller. Both the simulation results and the test results indicate that the proposed controller with strong robustness can track the desired reference trajectory of thruster speed with satisfied dynamic performance and steady accuracy. The modified parameter adaptive laws can also guarantee the boundedness of the estimated parameters.
Key words:electro-hydraulic proportional valves; propulsion system; adaptive parameter; sliding mode control; backstepping control
