LED驱动器自适应负载匹配技术
2016-08-01靳晓光林辉品周峰武吕征宇
胡 进, 靳晓光, 林辉品, 周峰武, 吕征宇
(浙江大学 电力电子国家专业实验室,浙江 杭州 310027)
LED驱动器自适应负载匹配技术
胡进, 靳晓光, 林辉品, 周峰武, 吕征宇
(浙江大学 电力电子国家专业实验室,浙江 杭州 310027)
摘要:为了提高LED驱动器与负载的可靠性,提出并实现LED驱动器自适应负载匹配技术.阵列式LED负载在运行过程中由于损坏可能会变成不同结构的负载.在驱动器中建立各种结构负载对应的伏安特性曲线数据库,并确定对应的工作点,使工作点上负载内所有LED的电流不超出额定值.驱动器通过采集负载的电压、电流,并与数据库中各种伏安特性曲线上的电压、电流对比,判断出当前负载的结构,并输出相应的电流,使负载工作在该结构的工作点上,避免负载进一步损坏.采用LLC变换器作为驱动电路,并研究其设计原则.样机及实验验证了该技术的有效性,表明该技术使得驱动器能与负载自动匹配,从而提高驱动器与负载的可靠性.
关键词:LED驱动器;LLC变换器;自适应负载匹配;LED照明
由于高光效和长寿命[1-2],LED被认为是非常出色的照明光源.在过去十余年,LED的光效不断提高,成本快速下降.大多数应用中,LED负载包含有数十颗LED,这种设计有利于配光,常常被设计成如图1所示的串并联形式的阵列结构,驱动器则被设计为恒流源[3-5].由于元器件的偏差,阵列中不同串LED的伏安特性(V-Iproperty)也不相同.如果不加以控制,某些串电流可能会超过额定值,从而造成该串损坏.
对于驱动器,尽管多路输出均流方案能很好解决负载电流不均衡的问题,但是成本较高,电路较复杂,故常用图1中的单路输出照明方案.一般情况下,驱动器输出的恒定电流需要被设计为保证阵列式模组负载中各串电流在稳态下均小于LED的额定值,这可以被认为是驱动器与负载匹配的情形.但是在负载由于老化或其他因素影响造成改变的情况下,有些串的电流可能超出额定值,使得驱动器输出的恒定电流不再适合阵列式模组负载,这可以被认为是驱动器与负载不匹配的情形.这种情形可能会导致负载进一步失效,甚至由于驱动器长时间工作在非最优态而缩短其寿命.为了避免这种不匹配情形,一个合理的方案是使驱动器的输出电流能根据负载结构进行自适应调整,以保证阵列式模组负载中各串电流都小于额定值.
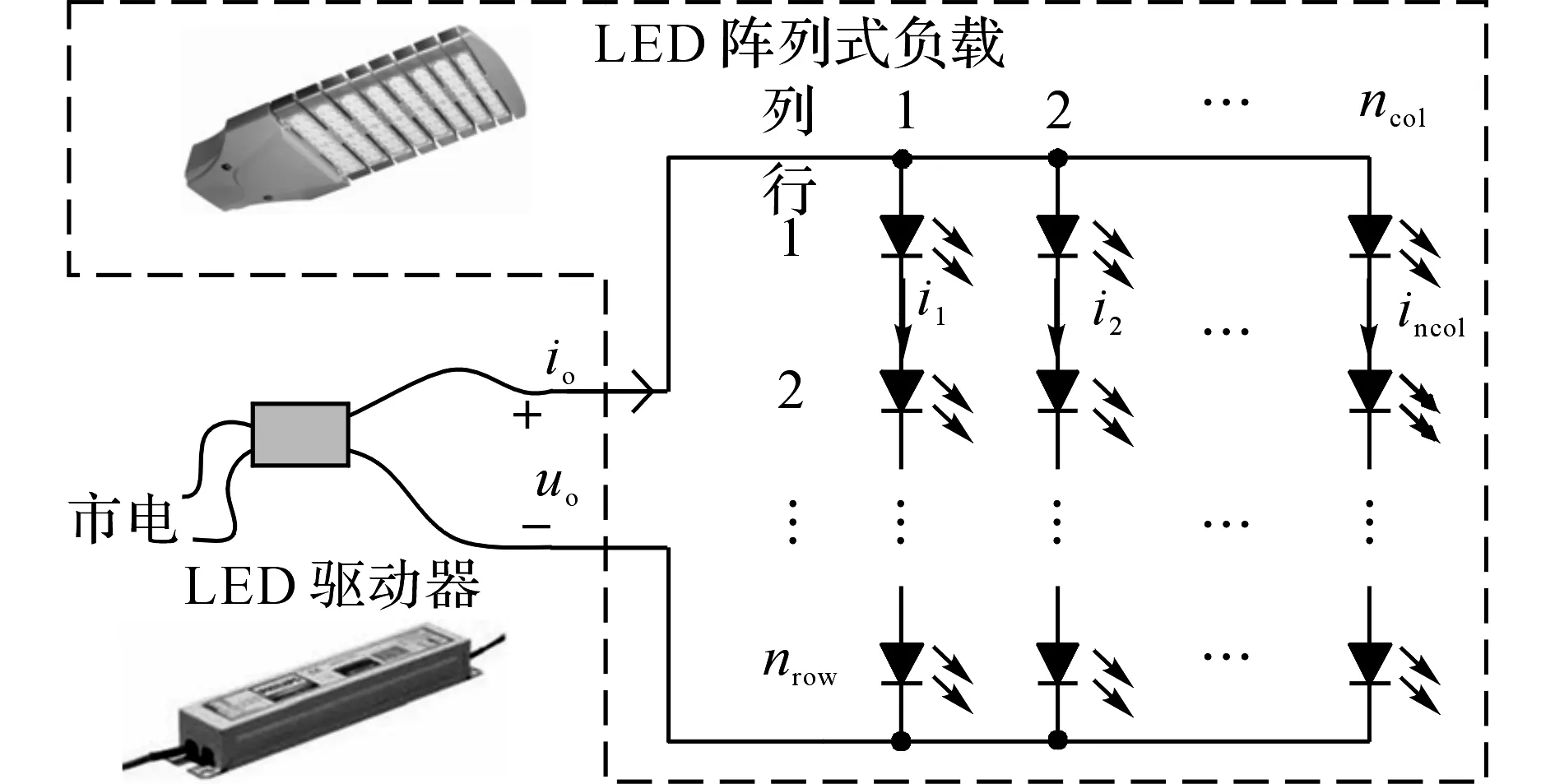
图1 典型LED阵列式负载及单路输出LED驱动器Fig.1 Typical LED array load and LED driver withsingle output
在过去十余年里,采用此思路的关于荧光灯[6-9]和HID(highintensitydischarge)灯[10]的负载自适应匹配的驱动技术已经被提出.但是由于灯特性不同,LED照明方案的不匹配情形与荧光灯和HID灯不同,需要研究一种适合LED照明系统的自适应负载匹配技术来解决这一问题.
本文总结由于负载结构变换引起的典型失配情形,研究不同结构负载的伏安特性,并据此建立数据库,分析驱动器输出的伏安特性,确定其输出适合负载工作的区域.驱动器通过检测负载的电流和电压,将其与数据库数据比较,判断出负载结构,根据负载结构提供相应的输出电流来实现自适应控制.为克服开机启动过程中电压电流采样不精确的问题,将驱动器的工作过程分为刚启动的Run-up阶段和稳态下的Burn阶段.Run-up阶段,驱动器输出电流的幅值被控制的呈阶梯状逐步升高,使得输出电压和电流能分段稳定以便于采样.分析LED伏安特性的偏差以及温度影响,并介绍驱动器中负载结构数据库的简化原则.
1负载失配分析
本文所研究LED照明系统中驱动器与负载一般有2种典型的失配情形.一种是驱动器上电起机前就与负载不匹配.例如:上电前负载中有些LED已经损坏,若驱动器还是提供原有的输出电流,则两者不匹配,称为静态失配情形.另一种是驱动器上电起机后,驱动器输出电流不变,如果负载结构突变,则两者会失配,称为动态失配情形.通常这种结构突变是由负载中某些LED损坏或者运行过程中有老化等因素造成接触不良所引起的.以有多串LED的阵列式模组负载为例,驱动器输出电流恒定,若其中某一串开路,则其余串将承担更大的电流,有可能超过额定值,缩短其寿命.
上述2种情形在实际应用中对于LED照明系统的可靠性均有负面影响,都是由驱动器输出的恒定电流不能根据负载结构变化调整所造成的.
2LED驱动器自适应负载匹配技术
为使驱动器能自动调整输出电流来匹配不同结构的负载,提出一种LED驱动器自适应负载匹配技术.
2.1建立包含多种结构的负载数据库
对于nrow行ncol列的负载,其结构变化可以反映在电压、电流的变化上,故驱动器可以通过采样负载的电压、电流来判断其伏安特性曲线及对应的结构.不同负载的伏安特性、对应的结构以及该结构伏安特性曲线上的工作点可以在驱动器中建立一个数据库.
第一步是研究各种负载结构对应的伏安特性.定义阵列式负载z伏安特性函数hz:
uo=hz(io),max(in)≤Ir.
(1)
式中:Ir为单颗LED的额定电流,io和uo分别为阵列式模组负载结构z的电流和电压,in是如图1所示负载中第n列的电流, n=0,1,2,…,ncol.
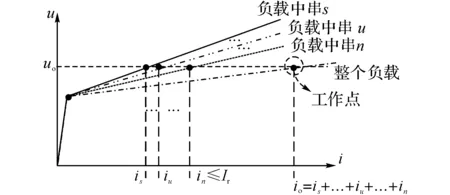
图2 LED负载结构的伏安特性曲线Fig.2 Voltage-current (V-I) property of LED load structure
具体数据可参考应用中所采用的LED的规格书进行推算,也可以根据测试得到.这样阵列式模组负载的不同结构以及对应的伏安特性可以以曲线上各点电压、电流的形式被记录在驱动器的MCU中,形成数据库.为直观起见,负载结构的伏安特性曲线可用图2中图形化方式表示,图中给出了整个负载及负载中串s、u、n等各串的伏安特性曲线,io、uo为工作点对应的电流、电压.is、iu、、in则为对应的串电流.
第二步是确定各种结构负载的伏安特性曲线上对应的稳态工作点.以图2为例,为保证负载中每一串LED的安全,流过每串的电流不能超过其额定值Ir.在所有串中第n串的电流最大,故只要保证该串电流小于额定值即可.为充分利用负载,得到尽量大的光通量,可将负载的工作点设计在其中第n串的电流等于额定值Ir.
经过上述工作,驱动器可以通过检测负载的电压、电流与数据库数据对比来判断负载结构.
2.2驱动器工作原理与设计原则分析
驱动器通过检测负载电压、电流与数据库数据对比判断出负载结构后,驱动器就可以根据其结构的伏安特性曲线上的稳态工作点来提供相应的输出电流.输出电流由驱动器输出的范围决定.因此需要优化驱动器的输出范围,使其涵盖数据库中所有负载结构的稳态工作点.下面将研究这种自适应驱动的原理以及驱动器的关键参数设计.
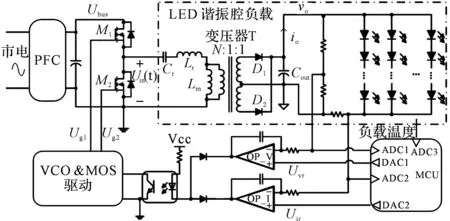
图3 具有自适应负载匹配功能的LED驱动器电路图Fig.3 Circuit diagram of LED driver with adaptive load matching ability
由于高效率的特点,LLC变换器常被用在LED驱动器中[3-4].图3给出了驱动器的原理图,它由前级功率因数校正(PFC)电路与后级的半桥LLC变换器级联构成.LLC变换器的谐振腔包含有谐振电容Cr、谐振电感Lr、励磁电感Lm.变压器T的变比是N∶1∶1.由于软开关特点,半桥MOSFETM1,M2的开关损耗较小.电平Uir和Uvr分别是驱动器输出电流io和输出电压vo的参考电平.通过电压环和电流环实现恒压、恒流控制[11-12].
在工作过程中,驱动器的输出电压uo和输出电流io被单片机的ADC1和ADC2实时采样,并与数据库中所存储的伏安特性曲线对比来确认负载结构以及相应的工作点.然后,MCU根据工作点提供相应的参考电平来控制输出电流io,这样驱动器就能自动匹配负载.这就是驱动器的自适应驱动的反馈原理.此外,MCU的ADC3采样了负载的温度,用以校准负载的伏安特性曲线.
为了使驱动器的输出电流能够与负载匹配,驱动器的输出范围应当包含数据库中所有结构对应的工作点.这是驱动器设计的原则.以图4为例,LLC变换器的输出范围需要被设计涵盖3种负载结构的工作点.
在推导驱动器的输出范围前,首先要研究LLC变换器的谐振腔在LED驱动器中的增益.传统应用中,谐振腔的增益常用输出电压比输出电压,但是由于LED驱动器为电流源,本文采用输出电流与输入电压的比值作为谐振腔的增益.
设Ubus为PFC的输出电压,f为LLC变换器的工作频率,则谐振腔的输入电压Uin(t)可表示为傅里叶级数的形式:
Uin(t)=

(2)
设RL为负载等效电阻;定义参数Q, fr1,k,m如下:


(3)
当LLC变换器工作在谐振点附近fr1时,可以用基波分析法(fundamentalharmonicanalysis,FHA)进行分析[13].LLC变换器谐振腔的增益G可表达为

(4)
式中:Uin1为谐振腔输入电压Uin(t)基波分量,j为虚数.

图4 不同结构负载与驱动器输出范围的伏安特性Fig.4 Voltage-current properties of different structure loads and driver’s output ranges
通常LLC变换器的输出范围由其工作频率范围的限制.如图4所示,线a-b-c-p-q和线d-e分别是最大频率fmax和最小频率fmin下的增益曲线.LLC变换器的输出也被最大输出电压Uomax和最大输出电流Iomax限制,Uomax和Iomax分别受参考电平Uvr和Uir控制.上述限制将LLC变换器的输出划分为区域1、区域2、区域3并在图中标记出.
在区域1,LLC变换器工作在开关连续模式,其工作频率介于fmax和fmin.在区域2,LLC变换器工作在间歇工作模式,工作频率为fmax.在区域3,由于最大电压、最大电流和工作频率限制,LLC变换器的输出无法达到此区域.
尽管LLC变换器的输出电流能在区域2内自由调节,但由于间歇工作模式,其输出纹波较大,有可能引起负载视觉上闪烁.故稳态下负载工作点最好都在区域1内.这是驱动器输出范围的设计原则.
在图4的例子中,3种负载结构的伏安特性曲线分别被命名为曲线A、曲线B、曲线C,其中A、B、C分别是这3种结构的稳态工作点.这3条曲线与最大频率fmax下的增益曲线分别相交与点a、b、c.由于工作点A、B、C应当在区域1内,故:
Iomax≥IX≥Ix, Uomax≥UX≥Ux.
(5)
式中:X表示工作点A、B、C,而x表示负载伏安特性曲线与变换器最大频率fmax下的增益曲线的交点a、b、c.
将式(4)代入(5)可进一步得到上述设计原则更详细的解析式(6).
(6)
式中:kmax、kmin分别为在最大频率fmax和最小频率fmin下k的值,RG=Uomax/Iomax,X=A、B、C,x=a、b、c.
LLC谐振腔的关键参数Lr、Cr、Lm、N可根据式(6)及文献[3]、[4]、[17]中的相关推导进行设计,从而得到能满足设计要求的LLC变换器.
需要指出的是,如果LLC最大工作频率fmax远远大于fr1,则Uin(t)的高阶谐波可能会影响输出电流的计算.故式(6)在计算中最好留较大的余量以降低这种影响.
如有调光功能,负载伏安特性曲线上的调光工作点最好也被记录在数据库中并满足式(6).
这样,驱动器中数据库已经被建立,它通过判断负载结构来提供相应的输出电流.驱动器通过合适的参数设计也具有了自适应负载匹配能力.
2.3工作过程分析
驱动器这种自适应负载匹配技术的前提是能够根据采样的负载电压、电流来判断负载结构.但是驱动器在刚上电起机后,由于图3中LLC变换器输出电容Cout较大,Cout上的电压由零上升到稳定通常需要一段时间.对于静态失配情形,在这个时间内,由于驱动器输出变化较大,采样准确度难以保证,故驱动器在此期间内判断出负载结构较为困难.而对于动态失配情形,由于负载变化发生在驱动器的稳态运行过程中,输出变化的暂态时间常常小于起机过程的暂态时间,故常可将这种暂态忽略.
参考荧光灯、金卤灯(mentalhalogen,MH)、高压钠灯(highpressuresodium,HPS)等气体放电灯的工作过程[14-16],LED驱动器的工作过程也可以类似的分为两个阶段,可称为Run-up阶段和Burn阶段,来分别解决静态失配和动态失配情形.需要指出的是,镇流器驱动气体放电灯分为不同阶段是由灯的特性决定的,而LED驱动器工作过程分为Run-up阶段和Burn阶段是为了更好的检测负载结构,这是两者的不同之处.
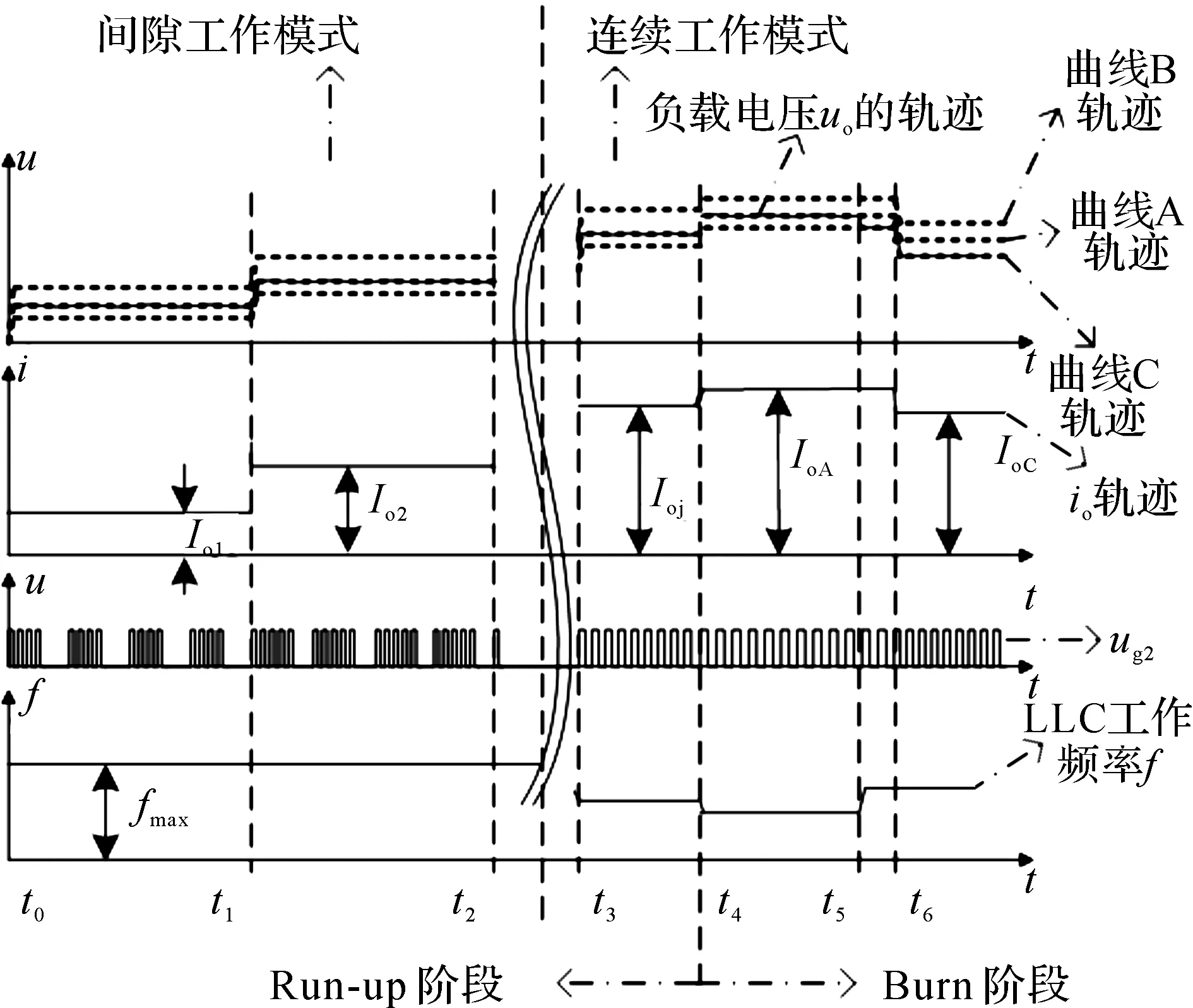
图5 驱动器工作过程中的波形Fig.5 Waveforms of driver during working process
图5给出了驱动器在时域上的波形图来解释工作过程.本例中,负载在驱动器启动后的结构具有伏安特性曲线A.在稳态下,负载由于失效结构发生了变化,伏安特性曲线由曲线A变为曲线C.在整个过程中,驱动器能自适应匹配负载,具体如下:
[t0~t1]: 驱动器上电,输出电流为Io1.此时驱动器中的LLC变换器工作在最大频率fmax,为间歇工作模式.由于[t0~t1]对于采样足够长,驱动器中的MCU能够检测到输出电压uo和输出电流io,并将它们与数据库中伏安特性曲线对应的电压、电流值进行比较以判断负载结构.本例中,由于采样的电压uo和电流io在曲线A上,故驱动器判断出负载结构并选择该结构对应的工作点A作为输出的最终目标值.
[t1~t2]: 输出电流io以一个固定步长增大到Io2.驱动器工作情况类似于[t0~t1].
[t2~t4]: 驱动器的输出电流类似于[t0~t2],逐步增加到Ioj.在[t2~t3],LLC变换器由间歇工作模式进入连续工作模式,开关频率也开始下降.
[t4~t5]: 驱动器的输出电流io达到了目标值IoA并保持稳定,IoA即结构A对应的工作点A的电流值.
[t5~t6]: 在t5时刻,由于有LED失效,负载结构变化,伏安特性曲线由曲线A变为曲线C.输出电压的变化被驱动器检测到.在此阶段,负载中可能有电流不平衡和过流现象存在,为失配情形.
[t6~]:驱动器确定负载变化后,将输出电流io的参考电平Uir调整,使工作点切换到伏安特性曲线曲线C对应的工作点C,这样驱动器与负载又重新匹配.
驱动器输出电流以固定步长逐步增大的[t0~t4]阶段就是本文所称的Run-up阶段.由于这个控制策略,驱动器能够在刚起机后较准确的检测输出电压和电流,有利于准确判断负载结构以解决静态失配情形.Run-up阶段的持续时间取决于采样速度、输出电容Cout容值以及驱动器的功率等级.HID或者荧光灯的Run-up阶段一般持续几分钟,而本文所提出的LED驱动器的Run-up阶段短则数秒长则数十秒,相对而言更加短,利于实际使用.
t4时刻后为Burn阶段,它解决的是动态失配情形.进入该阶段后,输出电压vo和输出电流io仍然被MCU采样.如果负载突变,驱动器能够自动调整输出电流来匹配负载.
需要指出的是,尽管LLC变换器在Run-up阶段一定会进入间歇工作模式,由于时间较短,即使有可能的闪烁也可以忽略.
2.4负载结构误判问题分析
前面介绍了建立负载结构数据库的方法,但是实际应用中,还要考虑负载伏安特性偏差和温度造成的影响,故需要对数据库中的负载结构的伏安特性进行校准.考虑到上述因素,式(1)中可增加一个负载结构n的电压偏差项und和负载温度To.图3中,负载温度被驱动器中的MCU所检测.修正后的负载伏安特性函数可表示为
|uo-hz(io,To)|≤und,max(in)≤Ir.
(7)
式中:und的值源自规格书中数据的计算结果,或者来自同一负载结构下大量负载的测试结果.其余参数含义与式(1)相同.
式(7)表明,数据库中以负载伏安特性区域代替原来的负载伏安特性曲线.所测量的电压电流在该区域内,都可认为是该负载结构.这种做法也适合软件操作.由于测量误差,采样的电压、电流刚好在负载伏安特性曲线上是很困难的,更合理的程序处理方式是同样电流下,判断采样的电压是否超出伏安特性曲线的范围,没有超出,则认为是该结构.
尽管修正过的伏安特性曲线能提高负载结构检测的准确性,但是仍然会有误判的情况存在.因为不同结构负载的伏安特性曲线区域可能有重叠的部分.考虑到负载安全,MCU可以认为具有较小工作点电流的负载结构是当前负载结构.该方法也可用于解决其他负载误判情况.为了降低这种误判概率,一般情况下,可以选择伏安特性差异性较大的负载结构建立数据库.
2.5简化数据库
理论上,所有LED负载结构的伏安特性都可以被计算或者测量出来.理想情况下,数据库中包含的负载结构越多,驱动器可以匹配更多的负载,系统也更可靠.然而有2个因素需要考虑.第一,结构越复杂的负载,负载所包含的衍生结构就越多,这对建立数据库可能会带来非常复杂的计算与测量工作,更复杂的结构也可能会有更多的结构误判情形.第二,有很多负载结构严重影响照明效果,不宜勉强使用.由于这两个因素,只有一部分负载结构适合存储在数据库中.因此数据库可以被简化.简化的原则是挑选重要的最好是伏安特性差异性较大的负载结构存储在数据库中.
必须强调的是,即使数据库的负载结构经过简化,即使可能存在负载误判现象,驱动器能够自适应判断一部分负载结构,与传统的无自适应判断负载功能的驱动器相比,也提高了照明方案的可靠性.本文提出的是一种通用的方法,提高的程度与具体的应用有关.
3实验验证
3.1设计目标与关键参数
为验证本文所提出的负载自适应匹配技术,设计了一台样机,其中PFC输入市电电压范围165~265V,输出电压Ubus为420V,输出最大电流Iomax为2A,最大电压Uomax为42V,最小工作频率fmin为40kHz,负载结构为12行3列,LED额定电流Ir为700mA.设计出LLC变换器的谐振腔中Lr为150uH,Lm为1 000uH,Cr为100nF,变压器匝比N为5.根据上文数据库简化原则,这里选择4种负载结构如表1所示.其他负载结构的设计与此类似,可根据应用中的实际需求进行选择.4种结构的负载的伏安特性可通过测试得到,点A、B、C、D分别被定义为结构1、2、3、4的工作点.在这些工作点下,流过每串的电流小于LED额定电流值700mA.
表1不同负载结构工作点的电压电流
Tab.1Voltageandcurrentatworkingpointsofloadswithdifferentstructures

结构名称结构说明工作点电流(A)工作点上阵列内不同串电流(A)工作点电压(V)结构1正常IA=2.00.650.680.67UA=39.3结构21串开路IB=1.30.640.660UB=39.3结构32串开路IC=0.70.7000UC=39.5结构4仅1颗LED短路ID=10.680.160.16UD=35.6
3.2负载与驱动器的输出范围的伏安特性实验
表1中4种负载结构的伏安特性曲线通过测量在图6中画出.横坐标为电流,纵坐标为电压.数据库中存储了曲线中各点对应的电压电流值.线p-q和线d-e分别是最大频率fmax和最小频率fmin下的增益曲线,区域1是LLC变换器的连续工作区域,包含了工作点A、B、C、D.该图含义与图4类似.测试结果表明,LLC变换器的设计目标已经实现.

图6 负载和驱动器输出范围的伏安特性Fig.6 Voltage-current properties of loads and driver’s output range
3.3静态失配情形的负载自适应匹配实验
由于驱动器控制的Run-up阶段,驱动器能在起机后快速判断出负载结构.通过在不同负载结构上的实验验证了这一控制策略.
对于负载结构1-4,上电起机后,驱动器的输出电流被设置在200mA并以100mA的步长逐步增大.负载电压被驱动器的单片机采样.一旦负载结构被驱动器确定,相应的工作点也就确定,驱动器输出的目标电流也就确定.负载结构1的Run-up阶段测试波形在图7中给出.其他的负载结构测试类似与此.

图7 带结构1负载的驱动器Run-up阶段输出波形Fig.7 Output of driver with structure 1 load in Run-up stage
在图7中,驱动器输出电流以步长100mA逐步增大,每增大一次持续1s,以利于MCU的稳定采样.负载结构1被MCU确定后,驱动器的输出电流的目标值被设置为结构1的工作点A对应的电流2A.整个Run-up阶段持续时间大约为18s.与荧光灯以及HID的Run-up阶段相比,该阶段很短.
对于负载结构2、3、4,由于工作点的电流均小于结构1工作点电流,故它们的Run-up阶段更短.
图7中,LLC变换器在Run-up阶段有一段较短时间在间歇工作模式下工作,图8给出了LLC变换器的在这种情况下的关键波形.由半桥MOSFETM2的漏源极电压uds2波形可见,LLC变换器为间歇工作模式.

图8 Run-up阶段LLC变换器间歇工作模式波形Fig.8 Waveforms of LLC converter in burst mode during Run-up stage

图9 驱动器在负载开路情况下输出波形Fig.9 Output waveforms of driver with open circuit load

图10 驱动器在负载短路情况下输出波形Fig.10 Output waveforms of driver with short-circuit load
图9、10为驱动器在负载开路和短路条件下的输出电压、电流波形.图9中的波形表明,驱动器检测到负载开路,输出电流为0,电压恒定.图10中的波形表明,驱动器在Run-up阶段检测到负载短路,经过一段时间后将驱动器输出关掉.
上述实验表明,驱动器能在Run-up阶段检测到负载结构,并提供相应的输出电流.也能检测到负载开路、短路的状态并进行相应的保护.这样,静态失配的情形就可以被避免.
3.4动态失配情形的负载自适应匹配实验
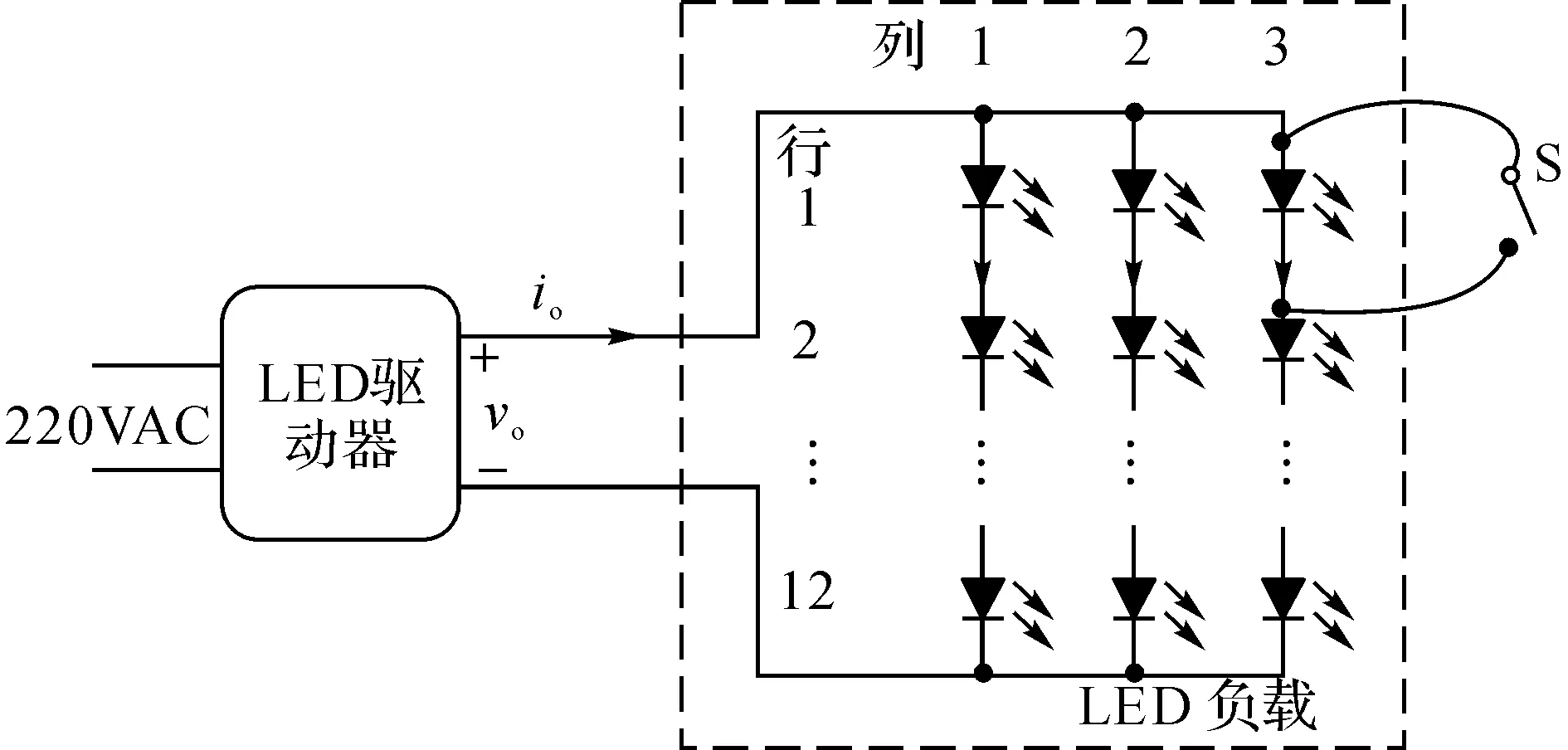
图11 自适应负载匹配驱动器动态失配实验原理图Fig.11 Schematic of dynamic mismatching experiment of adaptive load matching driver

图12 动态失配实验驱动器输出波形Fig.12 Output waveforms of driver in dynamic mismatching experiment
如图11所示,一个实验被设计来验证驱动器在动态失配情形下的负载自适应匹配能力.图中,一个开关S并联在负载结构1中的一个LED两端,将其导通可模拟该LED短路的情形,这样可等效于负载由结构1变为结构4.当驱动器工作在Burn阶段时执行该动作,即可验证动态失配情形下驱动器对负载自适应的功能.图12给出了此过程中驱动器输出的电压、电流波形.由图可见,从ta到tb,驱动器检测到负载结构由结构1变为结构4,将工作点调整为结构4的工作点,对应的输出电流为1A.
4结语
本文提出的自适应负载匹配技术可以使驱动器适应多种负载结构,改善传统驱动器运行过程中与负载不匹配的问题,提高照明方案可靠性.通过分析不同结构负载的伏安特性,在LED驱动器中建立了一个离线式数据库.驱动器通过检测负载电压、电流根据数据库判断当前负载结构,以提供相应的输出,使得驱动器与负载匹配.通过采用控制方式将驱动器工作过程分为启动后的Run-up阶段和稳态下的Burn阶段,解决了启动后的负载判断不准确的问题.样机实验验证了该技术的有效性.
由于同样数量的LED具有不同的串并联方式,其伏安特性曲线也各不相同.伏安特性曲线的差异性对于驱动器判断有明显影响,故其负载结构的优化对可靠性的影响有待进一步研究.本文结论提供了一般性的方法,对未来的更深入的研究和应用具有参考意义.
参考文献(References):
[1]TANSC.Generaln-leveldrivingapproachforimprovingelectrical-to-opticalenergy-conversionefficiencyoffast-responsesaturablelightingdevices[J].IEEETransactionsonIndustrialElectronics, 2010, 57(4): 1342-1353.
[2]AZEVEDOIL,MORGANMG,MORGANF.Thetransitiontosolid-statelighting[J].ProceedingsoftheIEEE, 2009, 97(3): 481-510.
[3]CHENY,WUXK,QIANZM,etal.DesignandoptimizationofawideoutputvoltagerangeLEDdriverbasedonLLCresonanttopology[C] ∥PowerElectronicsandECCEAsia(ICPEandECCE).Jeju:IEEE, 2011: 2831-2837.
[4]SHRIVASTAVAA,SINGHB.LLCseriesresonantconverterbasedLEDlampdriverwithZVS[C] ∥PowerIndiaConference, 2012IEEEFifth.Murthal:IEEE, 2012: 1-5.
[5]WANGHM,LIUZL,DONGJ.High-powerLEDconstant-currentdrivercircuitdesignandefficiencyanalysis[C] ∥CrossStraitQuad-RegionalRadioScienceandWirelessTechnologyConference(CSQRWC).Harbin:IEEE, 2011: 705-710.
[6]LEELM,HUISRY.Automaticlampdetectionandoperationforwarm-starttubularfluorescentlamps[J].IEEETransactionsonPowerElectronics, 2009,24(12):2933-2941.
[7]STMicroelectronics.AN2640:intelligentmultipowerdigitalballastforfluorescentlamps[EB/OL]. [2015-12-10].http:∥www.st.com/web/en/resource/technical/document/application_note/CD00173891.pdf
[8]JIAZR,LVXF,XUBW,etal.Anautomaticfluorescentlampdetectionmethodwithoutignitingthelamps[C] ∥AppliedPowerElectronicsConferenceandExposition(APEC), 2012Twenty-SeventhAnnualIEEE.Orlando:IEEE, 2012: 2392-2397.
[9]LOPESJDP,MENKEMF,BISOGNOFE,etal.Automaticlampdetectiontechniqueforfluorescentlampselectronicballasts[C]∥IndustryApplicationsSocietyAnnualMeeting(IAS).LasVegas:IEEE, 2012: 1-8.
[10]LVXF,JIAZR,JINC,etal.AnAdaptivecontrolstrategyforautomotiveHIDlampsbasedonlamptemperature[C] ∥EnergyConversionCongressandExposition(ECCE).Raleigh:IEEE, 2012: 1208-1213.
[11]SPINIC.STMicroelectronics,AN3106: 48V-130Whigh-efficiencyconverterwithPFCforLEDstreetlightingapplications[EB/OL].[2015-12-10].http:∥www.st.com/web/en/resource/technical/document/application_note/CD00256070.pdf
[12]AUGUSTONIG.STMicroelectronics,AN916:TSM101inS.M.P.S[EB/OL]. [2016-3-16].http:∥www.st.com/st-web-ui/static/active/en/resource/technical/document/application_note/CD00003999.pdf
[13]STEIGERWALDRL.Acomparisonofhalf-bridgeresonantconvertertopologies[J].IEEETransactionsonPowerElectronics, 1988. 3(2):174-182.
[14]KIRSTENAL,MARCOA,DALLAC,etal.DigitalcontrolstrategyforHIDlampelectronicballasts[J].IEEETransactionsonIndustrialElectronics, 2013,60(2): 608-618.
[15]MOOCS,LEEKH,YENHC.Profilingstartingtransientoffluorescentlampwithhigh-frequencyelectronicballast[J].IEEETransactionsonPlasmaScience, 2009,37(12):2353-2358.
[16]WANGYJ,XUDG,WANGW,etal.Electronicballastformetalhalidelampsusingaquasi-resonantinverterwithdigitalcontrol[J].IEEETransactionsonIndustrialElectronics, 2011, 59(4):1825-1840.
[17]LUB,LIUWD,LIANGY,etal.OptimaldesignmethodologyforLLCresonantconverter[C] ∥AppliedPowerElectronicsConferenceandExposition, 2006.APEC′06.Dallas:IEEE, 2006: 533-538.

第50卷第6期2016年6月浙 江 大 学 学 报(工学版)JournalofZhejiangUniversity(EngineeringScience)Vol.50No.6Jun.2016
通信联系人:王进,男,副教授.ORCID:0000-0003-3106-021X.E-mail:dwjcom@zju.edu.cn
收稿日期:2016-01-20. 2015-04-29.
基金项目:国家自然科学基金资助项目(51177148);光宝科技股份有限公司电力电子产学科研合作项目(浙江大学-2013-01). 国家自然科学基金资助项目(51275460);浙江省公益技术研究工业资助项目(2013C31046);高等学校博士学科点专项基金资助项目(20110101120005).
作者简介:胡进(1979—), 男,博士生,从事照明电子驱动技术研究.ORCID: 0000-0001-7833-7138.E-mail: justinhu2008@hotmail.com 通信联系人:吕征宇,男,教授,博导.E-mail: eeluzy@cee.zju.edu.cn 方力洋(1989—),男,博士生,从事CAD/CG研究. ORCID:0000-0002-2837-1255. E-mail: fly305802@zju.edu.cn
DOI:10.3785/j.issn.1008-973X.2016.06.012 10.3785/j.issn.1008-973X.2016.06.013
中图分类号:TM 923
文献标志码:A
文章编号:1008-973X(2016)06-1095-08
AdvancedadaptiveloadmatchingtechnologyusedinLEDdriver
HUJin,JINXiao-guang,LINHui-pin,ZHOUFeng-wu,LUZheng-yu
(State Key Laboratory of Power Electronics, Zhejiang University, Hangzhou 310027, China)
Abstract:An adaptive load matching technology used in LED driver was proposed in order to improve the reliability of LED driver and the load. The array LED load’s structure may change due to the failure during working process. The V-I (voltage-current) property curves of the load with different configurations were explored and used to build an off-line database in the driver. The database also included the working points on the curves, making sure that the currents flow through all LEDs in the load smaller than the rated value. The driver collected the output voltage and output current, and the load structure was detected based on the curves stored in the off-line database. According to the load structure, the output current was adaptively adjusted to make the load at its working point. LLC converter was used in the driver as driving circuit whose design principle was investigated. A prototype was tested under different mismatching cases. Results verify the effectiveness of the proposed adaptive load matching technology, indicating that this technology can improve the reliability of the driver and the load by making the driver match the load automatically.
Key words:LED driver; LLC converter; adaptive load matching; LED lighting
