新型适时四驱PHEV系统匹配与控制仿真
2016-07-28陈美奇
马 超,陈美奇,杨 坤,高 松
(山东理工大学交通与车辆工程学院, 山东淄博255049)
新型适时四驱PHEV系统匹配与控制仿真
马超,陈美奇,杨坤,高松
(山东理工大学交通与车辆工程学院, 山东淄博255049)
摘要:为了更深一步提高插电式混合动力汽车(PHEV)适应复杂行驶环境的能力,根据其工作特点和不同驾驶情况的性能要求,设计开发出一款采用启动/发电机、两档纯电驱动模式的新型插电式适时四驱混合动力系统。根据设计需求,对动力部件进行匹配及选型,针对性的开发了整车控制策略。为验证其性能,利用AVL Cruise搭建其整车动力学模型,基于MATLAB/Simulink开发了动力系统控制模型,采用Stateflow搭建模式切换状态流图。通过联合仿真结果表明:整车动力学系统参数匹配与控制达到设计要求,百公里加速时间达到6.22 s;相比无两档自动变速器PHEV,启动/发电机和两档自动变速器的使用使其纯电动续驶里程增长了11.49%,最终降低35.43%的使用成本。本研究为此类四驱PHEV系统的开发提供了一套完整的理论与技术,对推动PHEV的发展有着重大的理论和社会意义。
关键词:混合动力汽车;匹配;适时四驱;启动/发电机;两档纯电动驱动;控制策略;仿真分析
0引言
环境污染的加剧,雾霾天的出现,进一步激发了民众对节能减排的要求,国务院于2015年最新发布的《中国制造2025》中,将节能汽车及新能源汽车作为未来发展的重点领域[1]。兼具纯电动和混合驱动的插电式混合动力汽车(Plug-in Hybrid Electric Vehicle, PHEV)已成为我国新能源汽车发展重要战略取向。
插电式混合动力系统充分利用动力电池所提供电能驱动汽车,在中短途距离纯电动行驶体现了汽车经济节能的需求;同时发动机用于增程行驶模式,满足在长距离行驶需求;两模式的综合使用,使PHEV具备了长续驶里程、高燃油效率、低污染排放的特性,在纯电动汽车技术仍面临难点的现在[2],成为了最现实的新能源车型。
现今典型的插电式混合动力汽车中,如丰田普锐斯、通用雪佛兰沃蓝达等多是单轴驱动,此种驱动构型在城市道路行驶中有着良好的表现,具有较好的燃油效率,节能减排效果显著,但在复杂道路如湿滑或山区等需要较好的驱动能力的场合仍有提升潜力。因此,为了迎合此种需求,韩国成均馆大学Donghyun Kim[3]、湖南大学张文超[4]和华南理工大学莫愁等[5]分别对四驱动力系统进行开发及性能仿真,对动力部件进行了匹配及能量管理控制,在动力性和经济性上取得了较好的提升。加拿大安大略大学Ragheb.H等[6]通过对混合四驱动力汽车和传统四驱动力汽车爬坡性能仿真研究,结果表明混合四驱动力系统在爬坡性能上优于传统四驱。合肥工业大学邱利宏等[7]根据四驱混合动力汽车的工作模式,利用基于逻辑门限值的方法制定控制策略实现对汽车的控制,其动力性和经济性均达到设计指标。基于以上分析,本文提出了一类新型具备启动/发电机与两档式变速器的四轮驱动PHEV系统,并对其进行了匹配设计与开发。首先对如何提出插电式适时四驱混合动力系统构型的设计进行了说明;其次,对适时四驱混合动力系统结构的各驱动部件进行匹配;利用Stateflow搭建状态流图,实现适时四驱系统各工作模式的跳转,通过发动机最佳工作曲线(Optimal Operating Line, OOL)优化发动机的工作[8],最终实现对各个驱动部件扭矩的优化分配;为了验证此构型,利用AVL Cruise搭建了整车动力学模型,利用MATLAB/Simukink开发了整车控制模型,基于两者的联合仿真,对其性能进行了分析与评价。
1整车系统结构设计及动力学分析
1.1插电式适时四驱混合动力汽车构型设计
插电式混合动力系统中拥有两套独立的动力源,为方便适时四驱混合驱动系统布置,在前后驱动分别采用不同的驱动源,即前驱为发动机驱动,后驱为电机驱动[9]。
1.1.1纯电动后驱
插电式系统主要驱动模式为纯电动模式也被称为电量消耗模式(Charge Depleting,CD),在此过程中主要依靠动力电池为驱动电机提供电能驱动汽车后轮行驶。虽然纯电动可以实现汽车零排放同时满足汽车在短途面对复杂工况行驶的要求,但是研究表明纯电动行驶模式下传动系统中档位数对电机的工作效率和功率输出性能具有一定的影响[10],基于此考虑,本设计系统在电机后轮驱动模式下采用两档自动变速器来提高电机性能,在相对小的增加整车复杂度的同时提升电机的工作效率和增加纯电动模式下的续驶里程[11]。
1.1.2发动机前驱
在动力电池电量相对较低的情况下,整车驱动进入增程模式也叫电量维持模式(Charge Sustaining,CS),发动机作为主要的能量源驱动汽车前轮行驶。由于发动机工作区域的好坏对整车经济性能有着极大的影响,同时发动机怠速运转也会增加额外的燃油消耗[12],为了减小这部分消耗,本设计引用启动/发电机的概念[13-14],取消发动机的起动机,在飞轮端匹配连接一个启动/发电机用于发动机的快速启动和怠速停机。该启动/发电机在本设计系统中用来控制发动机启停和发电,不参与整车驱动,降低了控制系统的开发难度,提高了发动机的经济性。
1.1.3混合四驱
汽车在行驶过程中,行驶路况复杂多变,在动力电池电量较高时,如果遇到整车急加速或其他需求功率较高的情况,汽车则进入四驱模式,此时由驱动电机辅助发动机驱动整车,两套动力源同时为整车提供驱动力。
综上所述,本文所设计整车结构如图1所示。纯电动后驱搭载了两档自动变速器,发动机前驱部分取消了原有的起动机,使用了启动/发电机,目标车型可依据行驶路况自由选择纯电动后驱、发动机前驱及混合四驱模式。
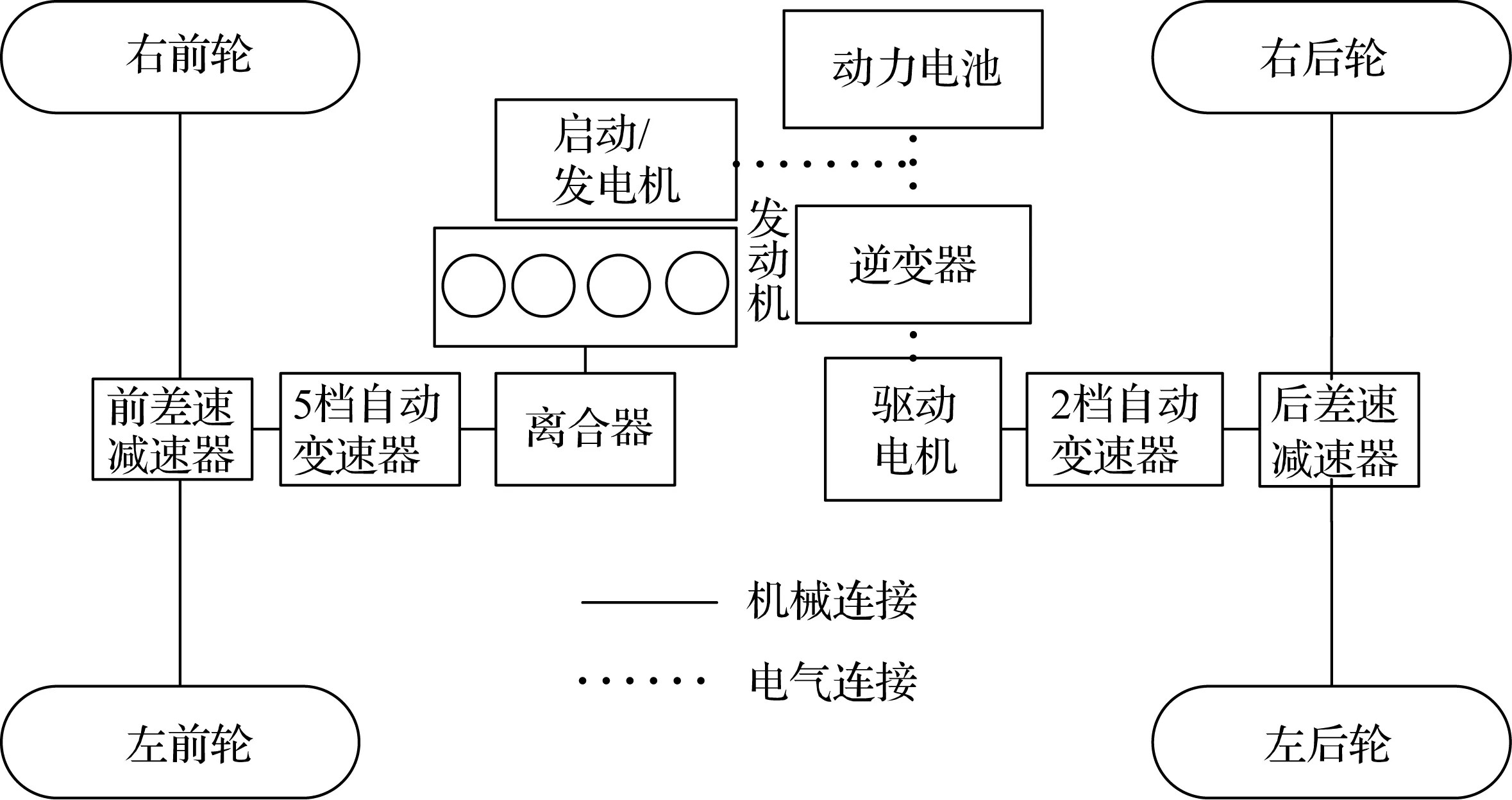
图1 插电式适时四驱系统结构
1.2整车动力系统动力学分析
本文设计系统可以满足整车在城市、郊区和高速公路行驶的要求,整车控制系统根据不同的行驶工况控制系统向车轮提供合适的驱动力,实现适时四驱驱动模式。其适时四驱驱动行驶模式及能量传递路线如图2所示。
①图2(a)为纯电动后轮驱动,由后驱动电机提供动力驱动后轮,动力传递关系为:
Twheel=TM×igr×i0r。
(1)
车轮需求扭矩由驱动电机提供,经两档自动变速器和后差速减速器传递到后轮。纯电动后轮驱动,动力电池电量较高,实现零排放经济行驶。
②图2(b)为发动机前轮驱动,由发动机单独提供动力驱动前轮,动力传递关系为:
Twheel=Te×igf×i0f。
(2)
车轮需求扭矩由发动机提供,经五档自动变速器和前差速减速器传递到前轮。发动机单独前轮驱动,动力电池电量较低,增程行驶。发动机发出过多功率由启动/发电机发电,维持动力电池电量。
③图2(c)为混合四轮驱动,由发动机和驱动电机联合提供动力驱动四轮,动力传递关系为:
Twheel=Te×igf×i0f+TM×igr×i0r。
(3)
发动机和驱动电机同时提供动力,经变速器和前后减速差速器分别传递到前后轮。四轮驱动,提高汽车性能,适应更多行驶工况。
④图2(d)为制动能量回收模式:
-Twheel=TM×igr×i0r。
(4)
驱动电机作为发电机提供相应的负扭矩,吸收车辆部分动能转化为电能补充动力电池,实现汽车制动能量回收。
式(1)~(4)中,Twheel为车轮的驱动力;TM为后驱动电机提供的驱动力;Te为发动机提供的驱动力;igf为5档自动变速器的传动比;igr为2档自动变速器的传动比;i0f为前主减速器的传动比;i0r为后主减速器的传动比。
通过两套独立的动力源分别驱动前后轮,既可以实现单独的两轮驱动也可以联合四轮驱动,简单方便的实现了整车的适时四轮驱动,同时也实现了制动能量的回收。

(a) 纯电动后驱模式

(c) 混合四驱模式

(d) 制动能量回收模式
图2目标车型能量传递流图
Fig.2Power flow map of the target vehicle
整车基本参数和目标性能如表1和表2所示。

表1 整车基本参数

表2 目标性能指标
2整车参数匹配
动力部件的合理参数对于提高各部件之间的机械传动效率,改善汽车在不同工况下行驶时的整车性能起着关键作用[15]。
2.1发动机与驱动电机选型
发动机功率的大小对整车动力性、燃油经济性和排放性均有很大影响,驱动电机不仅要满足纯电动模式独立驱动的性能要求,还要兼具回收制动能量的功能[16]。本文根据发动机单独驱动、纯电动和混合驱动时的设计要求进行匹配设计。
①通过最高车速确定动力部件的额定功率:

(5)
式中,Pe为额定功率,ηt为传动系统总效率,m为汽车满载质量,g为重力加速度,f为滚动阻力系数,Cd为空气阻力系数,A为迎风面积,umax1为最高车速。
②通过车速在30 km/h时的爬坡度和0~100 km/h加速时间分别计算动力部件的最大功率:

(6)

(7)
式(6)~(7)中,pemax为满足爬坡需求最大功率,pjmax为满足加速时间需求最大功率,i为爬坡度,ua为爬坡车速,ut为汽车有静止到加速终止的车速,t为汽车加速时间,k为时间常数。
③动力部件最大功率为应为:
Pmax=max(Pemax,Pjmax)。
(8)
2.1.1发动机参数的选取
根据公式(5)~(8),在发动机单独工作时设计发动机最大功率,考虑汽车附件等,发动机最大功率应有5%~10%的余量。如图3为所选发动机特性曲线及其最佳工作曲线,其中图3(a)表示发动机输出扭矩随发动机转速变化情况的发动机特性曲线,图3(b)表示发动机最佳工作曲线,表明不同转速与发动机输出功率之间的关系。
2.1.2电机参数选取
根据公式(5)~(8)计算驱动电机单独工作时的额定功率、峰值功率。在混合驱动模式下发动机和驱动电机联合驱动汽车,此时整车的功率为发动机功率和电机功率之和,通过公式(9)和公式(10)计算驱动电机的峰值功率:
PMmax2=PMmax1-Pemax,
(9)
PMmax=max(PMmax1,PMmax2),
(10)
式中,PMmax1为纯电动模式下驱动电机峰值功率,PMmax2为四驱模式下驱动电机峰值功率,PMmax为驱动电机峰值功率。
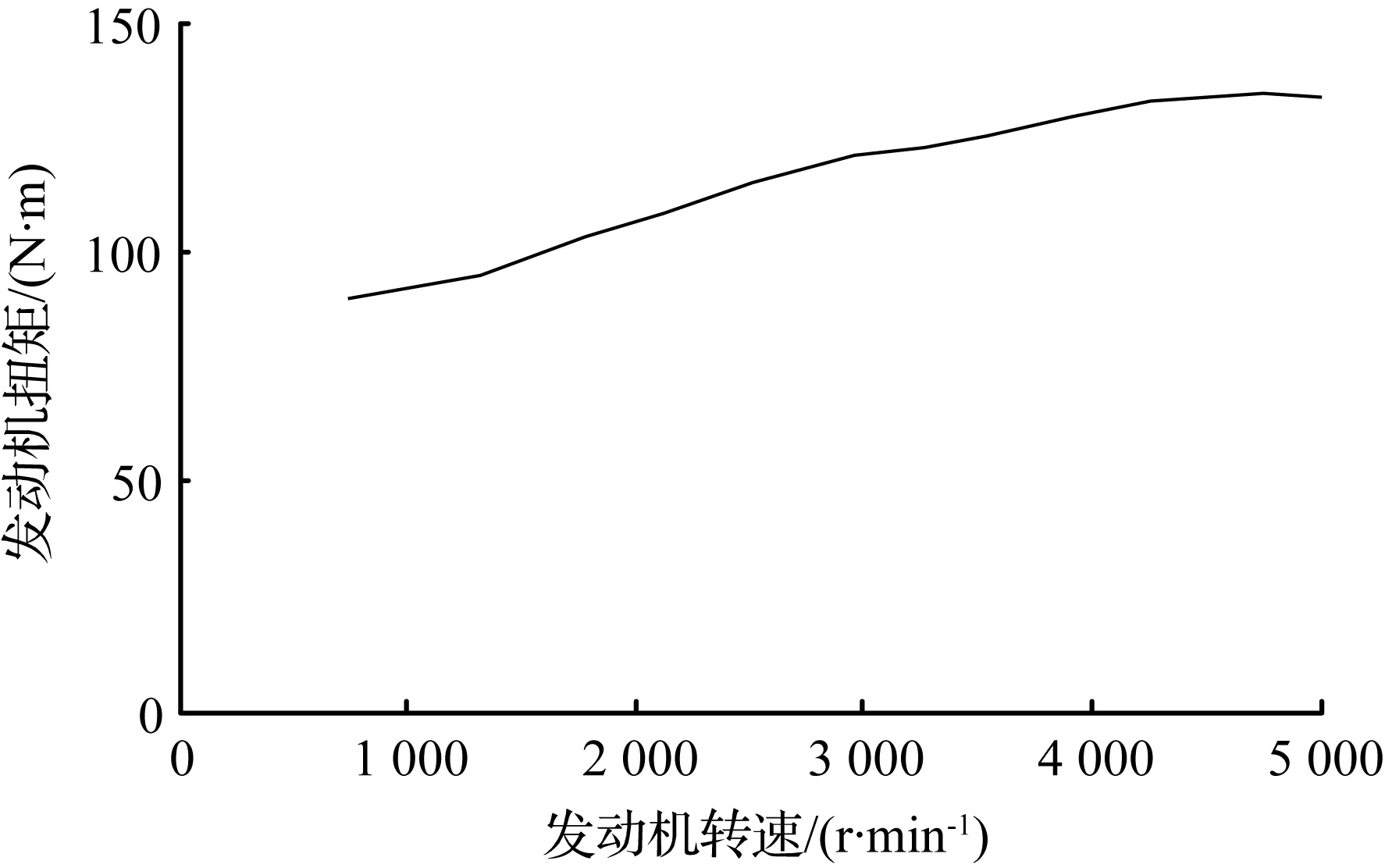
(a) 发动机特性曲线

(b) 发动机最佳工作曲线
图3发动机特性曲线及最佳工作曲线
Fig.3Engine characteristic curve and Optimal Operating Line(OOL)
2.2启动/发电机匹配
目标PHEV系统中启动/发电机主要作用是起动发动机和发电,需要满足以下条件:
①在增程模式下,发动机将过多的功率通过启动/发电机发电补充给动力电池,以纯电动平均行驶车速(45 km/h)所需功率为启动/发电机的额定功率。
②启动/发电机主要用于快速启停发动机,因此应能保证在极短时间内将发动机启动或怠速停机[17],其额定转矩TGe应满足:

(11)
式中,I为发动机转动惯量,nid为发动机怠速转速,ts为启动时间。
2.3动力电池参数设计
动力电池在整车系统中影响着汽车纯电动续驶里程、加速爬坡等能力[18],本文选取锂电池作为系统动力电池,并进行参数设计。
①以60 km/h匀速行驶时需求功率和设计续驶里程作为动力电池容量的设计目标:

(12)
式中,Cb为电池额定容量;Pv为汽车以车速v匀速行驶的所需功率;U为电池组额定电压;ηe为驱动电机的工作效率;ηDOD为电池的放电深度。
②分别以纯电动后轮驱动下驱动电机的峰值功率和汽车续驶里程的要求确定动力电池的数目,通过公式(13)和公式(14)计算:

(13)
(14)
式中,Pbmax为单体锂电池的最大输出功率;ηe为驱动电机的效率;ηec为驱动电机控制器的效率;L为汽车的续驶里程;W为整车在单位里程所消耗能量;Cr为单体电池额定容量;Ur为单体电池电压;Pa为整车从t1时刻行驶至t2时刻总的需求功率。
2.42档自动变速器传动比
考虑纯电动直接驱动下的诸多问题,本设计中在驱动电机和车轮之间增加减速器和2档自动变速器,提高纯电动模式下驱动电机的性能。主减速器的传动比i0r=3.0。
①由驱动电机的最高转速要符合设计最高车速来确定最高档位传动系最大速比:

(15)
②根据最高车速和电机最高转速下的输出转矩确定传动系速比:

(16)
③通过最大爬坡度和电机的最大输出扭矩来计算最低档传动系的最小传动比:

(17)
经过以上计算,整车动力部件参数匹配结果如表3所示。

表3 动力部件参数匹配
3控制策略与动力系统模型开发
3.1目标车型整车控制策略开发
插电式适时四驱混合动力整车控制系统由发动机控制系统(ECU)、电机控制系统(MCU)、电池控制系统(BMS)和再生制动控制等组成。将车速、整车需求扭矩、需求功率、驾驶员意图信号及电池荷电状态(State of Charge, SOC)作为输入信号,识别整车行驶模式并计算各动力部件所需输出扭矩。图4为搭建的模式识别示意图:
①汽车处于静止状态时,处于机械制动模式,此时如果动力电池SOC较低,则进行外接充电;
②当汽车开始行驶,整车需求功率大于零且SOC大于最低限时,汽车进入纯电动后轮驱动模式。汽车在纯电动后轮驱动行驶时如果急加速或进入高速大功率行驶时,汽车将进入四轮驱动模式;
③在动力电池SOC低于最低下限时,汽车进入增程模式。在动力电池SOC相对较高时,汽车首先进入低电量纯电动后轮驱动模式。动力电池SOC继续减小则汽车进入发动机前轮驱动模式,当发动机发出功率大于汽车行驶所需功率时,汽车将进入发动机前轮驱动充电模式;
④在汽车行驶过程中,制动或者滑行时,汽车将进入制动能量回收模式。
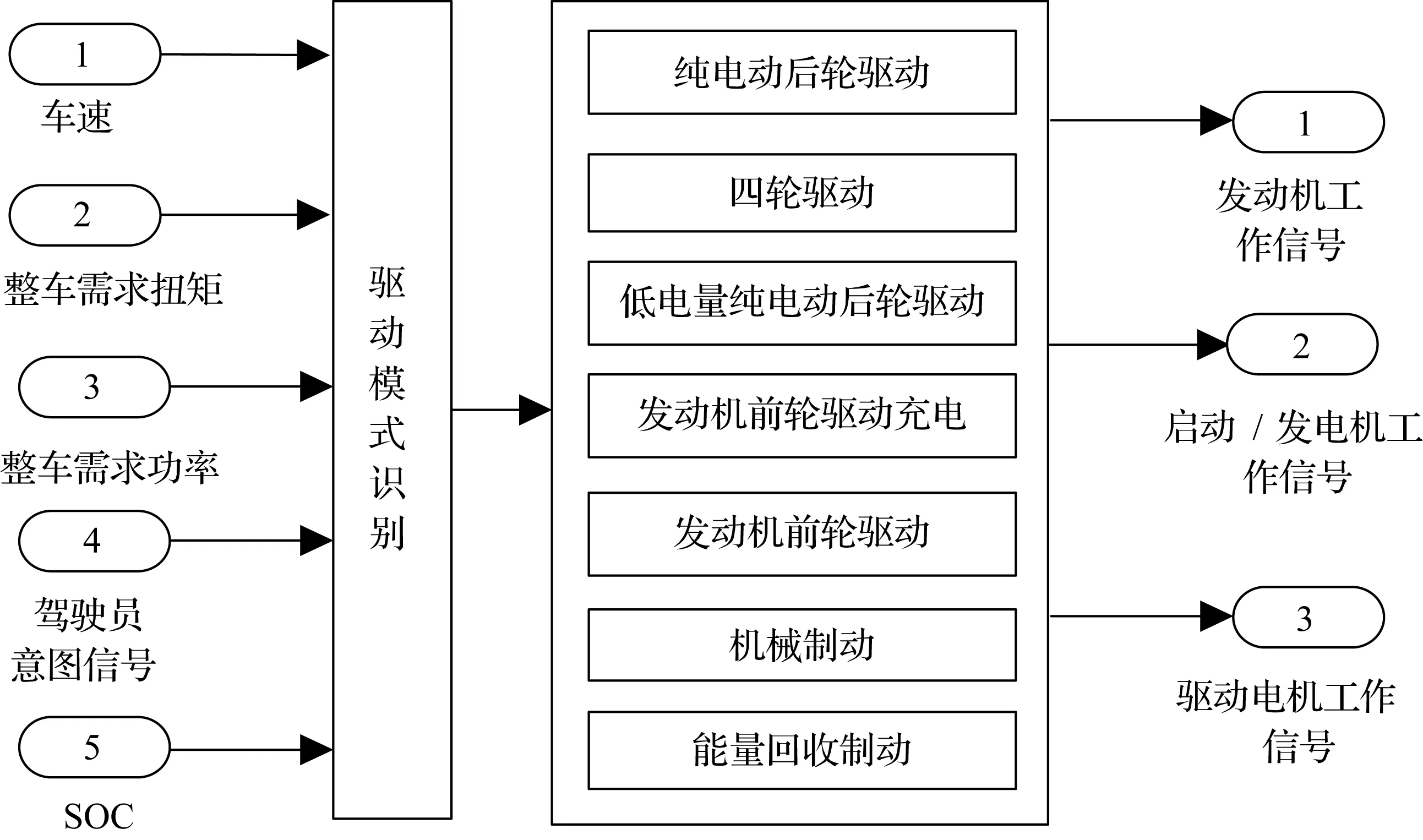
图4 驱动模式识别示意图
根据不同驱动模式下动力部件运行状况的不同及汽车行驶需要扭矩,对各动力部件进行扭矩分配。
①发动机扭矩确定
发动机的输出扭矩是通过发动机的最佳工作曲线确定的:
Te=f(eng_spd,eng_OOL)。
(18)
②驱动电机扭矩确定
驱动电机用于纯电动后轮驱动和制动能量回收模式时的需求扭矩由公式(19)确定,用于四轮混合驱动时的需求扭矩由公式(20)确定。

(19)

(20)
③启动/发电机扭矩确定
启动/发电机扭矩是用来启停发动机或调整发动机输出扭矩的,其输出扭矩为:
Tfc=Tf-Te。
(21)
式(18)~(21)中,eng_spd为发动机设计转速,eng_OOL为发动机最佳工作曲线,Tfc为启动/发电机输出扭矩,Tf为启动/发电机控制器调节扭矩。
3.2目标车型整车动力系统开发
利用AVL Cruise软件搭建完整的插电式适时四驱混合动力系统模型,如图5,将各模块通过机械和电气连接起来。输入所搭建系统各模块参数,并添加计算任务。通过API模块将MATLAB/Simulink所搭建的控制策略放入Cruise中进行联合仿真。

图5 Cruise和MATLAB联合仿真模型
4仿真结果分析
4.1模式切换分析
为了模拟目标车型所面临的各种行驶环境,选择Ftp72循环工况并对所搭建插电式适时四驱混合动力系统进行仿真。四驱动力系统车速以及各工作模式切换过程如图6所示。

图6 车辆车速及模式切换图
在刚开始运行时,动力电池SOC充足,汽车完全依靠电机驱动;在急加速时,汽车进入四驱模式;动力电池SOC不足后汽车进入增程驱动模式,在此模式下动力电池SOC相对较高时为低电量纯电动后轮驱动,相对较低时则完全由发动机驱动,在汽车需求功率较小,发动机多余一部分功率用于发电即为发动机前轮驱动充电模式;当汽车需求功率较高时,发动机功率完全用来驱动整车行驶即为发动机前轮驱动。在整个过程中不仅实现驱动模式同时也实现了汽车的制动能量回收模式。
图6中由于汽车频繁加速和制动出现模式频繁跳转情况,此时为纯电动驱动模式,在制动时符合本设计制动能量回收模式,因此汽车频繁跳转于纯电动驱动和制动能量回收模式。
①后轮驱动
在后轮驱动模式下,发动机和启动/发电机均不工作,所发出扭矩为零,只有驱动电机作为动力源提供动力,输出扭矩(动力电池SOC充足)和动力电池SOC变化如图7所示,驱动电机的扭矩为正时驱动汽车行驶,动力电池SOC下降,驱动电机的扭矩为负值时汽车处于制动能量回收模式,此时动力电池SOC值会稍微上升。

(a) 驱动电机扭矩曲线
(b) 电池SOC曲线
图7纯电动驱动电机扭矩及电池荷电状态(SOC)曲线
Fig.7Pure electric drive motor torque and battery state of charge (SOC) curve
②前轮驱动
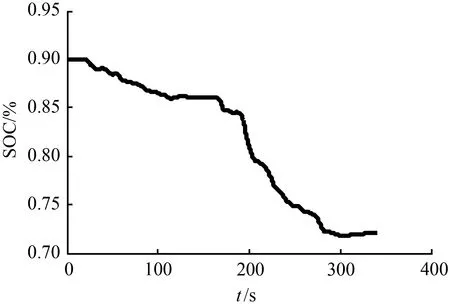
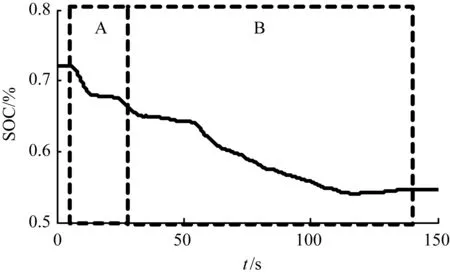
如图8所示,t=20~128 s时,车辆工作在低电量纯电动后轮驱动模式(A阶段),电池SOC从29%降到了23%,此时只有驱动电机提供驱动扭矩;t=160~190 s时,车辆工作在发动机前轮驱动充电模式(B阶段),在t=165.3 s时,启动/发电机输出一个70 N·m的扭矩用来启动发动机,发动机启动后输出扭矩来驱动汽车,多余发动机功率用于驱动启动/发电机发电;t=190~253 s时为发动机前轮驱动模式(C阶段),发动机提供功率完全用于驱动汽车,驱动电机和启动/发电机不工作;D阶段和E阶段分别与B阶段和A阶段重复,在此不再赘述,整个过程SOC由29%下降到24.59%。
③四轮驱动
如图9所示,在t=5~23 s时为四轮驱动模式(A阶段),汽车由驱动电机启动,由于急加速需求功率增大,启动/发电机提供瞬时正扭矩快速启动发动机,此时驱动电机辅助提供动力;在t=23~145 s时为纯电动后轮驱动模式(B阶段),汽车行驶不再满足四驱行驶条件,启动/发电机提供负扭矩使发动机快速停机,由驱动电机提供驱动扭矩,进入纯电动后轮驱动模式。

(a) 驱动电机扭矩曲线

(b) 发动机扭矩曲线

(c) 启动/发电机扭矩曲线

(d) 电池SOC曲线
图8前轮驱动动力部件扭矩及电池SOC曲线
Fig.8Front wheel drive power component torque and battery SOC curve

(a) 驱动电机扭矩曲线

(b) 发动机扭矩曲线

(c) 启动/发电机扭矩曲线
(d) 电池SOC曲线
图9四轮驱动动力部件扭矩及电池SOC曲线
Fig.9Four wheel drive power component torque and battery SOC curve
4.2动力性分析
在AVL Cruise中分别添加最高车速、加速和爬坡性能计算任务,验证整车动力性能,通过表4仿真数据结果看出,无论是前轮驱动、后轮驱动还是四轮驱动均满足设计要求,四驱模式下汽车爬坡达68.33%。图10为四轮驱动与单轴驱动加速性能比较,在相同的驾驶环境下,四轮驱动模式下汽车加速性能明显优于单轴驱动模式,百公里加速时间仅为6.22 s,具有更好的加速性能。

表4 动力性仿真结果

图10 适时四驱加速性能曲线Fig.10 Real time acceleration curve
在本文中,还将此车的动力性与传统四驱汽车及四驱混合动力汽车的性能进行了比较(表5);在本设计系统的基础上增加发动机起动机、去除启动/发动机及两档自动变速器,采用分动器系统改为传统四驱汽车(构型1);以前轮为发动机驱动,后轮为电机驱动改为一般四驱混合动力汽车(构型2)。分别建立以上四驱系统的模型并进行动力性仿真,仿真结果如表5所示。
如表5所示,构型1的加速时间为9.95 s,而此动力性的获取是以发动机功率的提升为代价的,在本设计中所选发动机为70 kW,构型1所选发动机功率增至90 kW;对于构型2,加速时间为12.4 s,是三种构型中加速时间最长的,这是由于后轮驱动时,电机直接将动力经主减速器传到车轮,未经过变速器进行增扭减速,且加速起始阶段发动机不参与驱动,甚至加速性能弱于构型1;本设计中的四轮驱动系统增加两档自动变速器后,在最大爬坡度和百公里加速性能上明显优于对比车型,相比于构型2分别提升42.06%和46.6%,同时相对于传统四驱汽车,四驱混合动力汽车具有纯电动行驶的能力,具备更加良好的节能减排意义。

表5 动力性仿真比较
4.3经济性分析
在经济性的仿真中主要对发动机油耗、动力电池电量消耗、百公里能量回收及续驶里程等进行研究。
本设计与其他构型最大的不同便是增加了两档自动变速器,因此,首先研究构型2与本设计中驱动电机运行效率和纯电动模式下续航里程的影响。选择Ftp72循环工况对整车经济性能仿真,图11为前500 s工况下两种构型的电机驱动效率比较,在大部分工况下(如图11中圆形实线所标注区域),直接驱动电机效率低于变速后驱动;而在矩形虚线所标注区域内,由于此时车速大于80 km/h,直接驱动时电机效率略高,但在整个行驶过程中,直接驱动电机平均效率为76.55%,增加两档变速器后提升为86.23%,且由于汽车纯电动行驶更多用于城市内中低速行驶,增加两档变速器更能有效提升经济性。
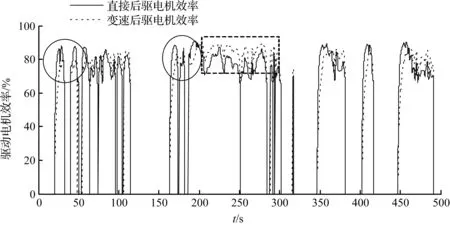
图11 驱动电机效率

图12 纯电动模式续驶里程Fig.12 Pure electric driving range
图12为汽车以60 km/h匀速纯电动后轮驱动行驶,无变速器直接驱动和增加两档变速器后汽车续驶里程比较,结果表明增加两档变速器后动续驶里程较无变速器直接驱动情况下提升11.49%。
为进一步研究经济性,将构型1发动机选取为90 kW,构型2与本设计均进行制动能量回收,在Cruise中进行经济性仿真,同时以当前当地油价5.94元/L、电价0.71元/(kW·h)计算成本。从表6中可以看出,本设计设置启动/发电机对发动机进行快速启停控制后,较构型2的百公里油耗减少0.16 L,百公里耗电也由于驱动电机效率的提升减少4.82 kW,最终本设计四驱混合动力汽车系统较构型1节省35.43%使用成本。

表6 经济性仿真结果比较
4.4讨论
通过以上仿真分析可以发现,本设计混合动力汽车与构型1相比发动机功率配置更小,在动力性和经济性上表现更加优越;与构型2相比,引入启动/发电机对发动机快速启停进行控制、增加两档自动变速器提高了驱动电机在中低速行驶时的工作效率,进一步提升了四驱混合动力汽车的性能,同时节省了汽车的使用成本。因此,此类适时四驱系统对PHEV整车性能的提升有着重大的理论意义与实践意义,为此类PHEV的研发提供了必要的理论和技术基础。
5结语
本文根据插电式混合动力汽车的特点设计开发一种新型适时四驱混合动力汽车系统,具备启动/发电机和两档变速系统,通过匹配分析计算可知,所匹配动力部件满足汽车行驶性能要求,所搭建模式切换状态流实现汽车在不同工况行驶工作模式的顺利切换,并且各动力部件扭矩分配合理。仿真结果可以看出,在前轮和后轮驱动满足汽车普通行驶的基础上,混合四驱模式使汽车在动力性能上有较大的提升,更能适应复杂的行驶环境;发动机的快速启停控制和电机效率的提高也使纯电动情况下汽车续驶里程提升11.49%,使用成本降低35.43%。
参考文献:
[1]张长令.全面推进新能源汽车产业发展的思考[J]. 中国产业经济动态, 2015 (20): 35-39.
[2]WANG T, CASSANDRAS C G, POURAZARM S.Optimal motion control for energy-aware electric vehicles[J]. Control Engineering Practice, 2015, 38: 37-45.
[3]KIN D, HWANG S, KIM H.Vehicle stability enhancement of four-wheel-drive hybrid electric vehicle using rear motor control[J]. IEEE Transactions on Vehicular Technology, 2008, 57(2): 727-735.
[4]张文超, 周兵, 吕绪宁.四驱型混合动力汽车前向仿真模型开发[J]. 机械科学与技术, 2014,33(6):913-917.
[5]莫愁,陈吉清,兰凤崇.四驱混合动力汽车动力系统匹配与控制策略研究[J]. 汽车工程学报, 2013, 3(3):199-204.
[6]RAGHEB H, AYDIN M, El-GINDY M, et al.Comparison of gradability performance of fuel cell hybrid electric and internal-combustion engine vehicles[J]. Journal of Power Sources, 2013, 221: 447-454.
[7]邱利宏,钱立军,程伟.插电式四驱混合动力轿车控制策略研究[J]. 汽车工程学报, 2015, 5(1): 66-73.
[8]KANG J, CHOI W, KIM H.Development of a control strategy based on the transmission efficiency with mechanical loss for a dual mode power split-type hybrid electric vehicle[J]. International Journal of Automotive Technology, 2012, 13(5): 825-833.
[9]徐悦,郭俊,张雄,等.电动四驱混合动力车的模式切换平稳性研究[J]. 北京汽车, 2014(1):17-19,23.
[10]王杰,张舟云,贡俊.纯电驱动电动汽车用动力传动系统方案对比分析[J]. 微特电机, 2012, 40(10): 52-54, 57.
[11]何志刚, 周成, 盘朝奉, 等.基于粒子群算法纯电动汽车传动系统参数的优化[J]. 广西大学学报(自然科学版), 2015, 40(5): 1092-1101.
[12]吴琼, 李卫兵, 袁子红, 等.怠速转速对整车燃油经济性的影响[J]. 车用发动机, 2015 (4): 67-69.
[13]VORONIN S G, SOGRIN A I, SHABUROV P O, et al.A starter-generator for a diesel power plant[J]. Russian Electrical Engineering, 2013, 84(10): 556-559.
[14]姜娇龙,赵治国.混合动力发动机快速起动过程模拟与分析[J]. 机械与电子, 2013, 2013(5): 31-35.
[15]万帆, 傅春耘, 盖江涛, 等.插电式混合动力汽车动力传动系统的参数匹配及仿真[J]. 重庆理工大学学报(自然科学版), 2015, 29(6): 19-26.
[16]初敏, 高松, 杨坤, 等.纯电动客车最佳制动能量回收控制策略研究[J]. 广西大学学报 (自然科学版), 2015,40(2):357-366.
[17]王刚毅.插电式混联四驱混合动力轿车动力系统匹配设计及仿真[D]. 西安:长安大学, 2014.
[18]肖蕙蕙, 王志强, 李山, 等.电动汽车动力锂离子电池建模与仿真研究[J]. 电源学报, 2012(1): 41-44.
(责任编辑梁健)
收稿日期:2016-01-08;
修订日期:2016-02-26
基金项目:山东省自然科学基金资助项目(ZR2015EL025;ZR2015PE020;ZR2015EM054)
通讯作者:高松(1965—),山东潍坊人,山东理工大学教授,博士生导师,工学博士;E-mail:gs6510@163.com。
doi:10.13624/j.cnki.issn.1001-7445.2016.0684
中图分类号:U469.72
文献标识码:A
文章编号:1001-7445(2016)03-0684-14
Powertrain parameters design and system control simulation for a new type real time 4WD PHEV
MA Chao, CHEN Mei-qi, YANG Kun, GAO Song
(School of Transportation and Vehicle Engineering, Shandong University of Technology, Zibo 255049, China)
Abstract:According to the vehicle working characteristics and various driving requirements, this study designs and develops one new type plug-in real time hybrid electric powertrain system to further improve the capability of Plug-in Hybrid Electric Vehicle (PHEV) when facing various road conditions. This system adopts the Starter-Generator and pure electric driving mode with two speed transmission. Simple configuration design and powertrain dynamic analysis are performed. Based on the design requirements, the full vehicle control strategy is developed. In order to verify its performance, the powertrain model of the target PHEV is developed by using AVL Cruise. The full vehicle control strategy is developed by using MATLAB/Simulink, where the state flow is used to construct the mode state change algorithm. The co-simulation results show that the powertrain parameters matching and control strategy meets the design requirements, and one hundred kilometers acceleration time is 6.22 s. Compared to the PHEV configuration without two speed transmission, the application of the starter/generator and two speed transmission makes the pure electric driving range increased to 11.49% and finally reduces the using cost of 35.43%. This research provides a complete theory and technique for the design of similar four wheel driving PHEV system, which has a key theory and social meaning for the development of PHEV.
Key words:hybrid vehicles; matching; real-time 4WD; starter/generator; two speed pure electric driving; control strategy; simulation analysis
引文格式:马超,陈美奇,杨坤,等.新型适时四驱PHEV系统匹配与控制仿真[J].广西大学学报(自然科学版),2016,41(3):684-697.
