RV减速器用轴承的受力分析
2016-07-26张振强王东峰刘胜超李献会何崇光
张振强,王东峰,刘胜超,李献会,何崇光
(1.洛阳轴研科技股份有限公司,河南 洛阳 471039;2.河南省高性能轴承技术重点实验室,河南 洛阳471039;3.滚动轴承产业技术创新战略联盟,河南 洛阳 471039)
RV(Rotary Vector)减速器是在摆线行星减速器机构的基础上形成的二级封闭传动机构,因体积小、抗冲击力强、扭矩大、定位精度高、振动小、减速比大等优点被广泛应用于工业机器人、机床、医疗检测设备、卫星接收系统等领域[1,2]。
日本帝人等公司生产的RV减速器所用轴承均由NSK和NTN等公司提供,其相关技术保密;国内关于RV减速器零部件的研究[3-5]主要集中在摆线轮,关于减速器用轴承的研究较少,且该类轴承受力状况难以确定,给轴承的优化设计带来了困扰。随着德国工业4.0和中国制造2025的提出,国内机器人行业迅速发展,但国内RV减速器性能与国外仍存在明显差距,其重要原因为国产轴承性能无法满足减速器使用要求。洛阳轴研科技股份有限公司通过与减速器厂家合作,对RV减速器所用轴承进行科研攻关,研发出一系列RV减速器专用轴承,并对其进行受力分析,以期为该类轴承的设计提供参考[6-8]。
1 运动原理
RV减速器结构及轴承安装示意图如图1所示,其内部主要有主轴承(通常为角接触球轴承)、保持架组件和圆锥滚子轴承3类轴承,其具体结构如图2所示(某些型号的减速器还会用到深沟球轴承),一台减速器总共采用10~16套轴承。RV减速器的运动原理:输入齿轮通过与正齿轮啮合带动曲柄轴旋转(包括自转与公转);曲柄轴在转动过程中带动摆线轮旋转,曲柄轴中间的2套保持架组件起到支承摆线轮的作用,曲柄轴两端的圆锥滚子轴承起到支承曲柄的作用;在支承凸缘被固定的情况下,摆线轮通过与针齿的啮合带动减速器外壳转动;在减速器外壳被固定的情况下,摆线轮通过与针齿啮合带动支承凸缘转动。

1—外壳;2—针齿;3—RV齿轮;4—主轴承;5—支承凸缘;6—输入齿轮;7—曲柄轴;8—保持架组件;9—圆锥滚子轴承;10—正齿轮;11—轴

图 2 RV减速器用轴承
2 受力分析
2.1 主轴承
RV减速器用主轴承通常为角接触球轴承,2套轴承背对背安装在减速器外壳与支承凸缘上,其受力如图3所示。

图3 RV减速器主轴承受力示意图
在外力F1和F2的作用下,行星架受到倾覆力矩M1,该力矩主要由主轴承A和B共同承担。由于2套轴承背对背安装,外部轴向力F1由主轴承B承担,主轴承A不受外部轴向力,则由以上关系可得
M1=F1c+F2d,
(1)
FrAa+FrBb-M1=0,
FrA+F1-FrB=0,
FaB=F2,
式中:Fa,Fr分别为轴向力和径向力;a,b,c,d分别为各力与作用点的距离。
故轴承A和B所受的作用力分别为
FaA=0,FrA=(F1c+F2d-F1b)/(a+b),
FaB=F2,FrB=(F1a+F2d+F1c)/(a+b)。
2.2 保持架组件
RV减速器的摆线轮是RV减速器传递扭矩的关键零部件,RV减速器摆线轮受力示意图如图4所示(T1为该摆线轮传递的扭矩),由于RV减速器中2个摆线轮同时受力,则总扭矩
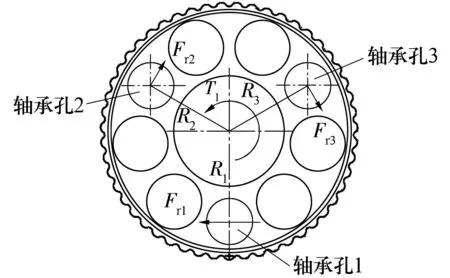
图4 RV减速器摆线轮受力示意图
T=2T1=2(Fr1R1+Fr2R2+Fr3R3),
(2)
R1=R2=R3,
式中:R1,R2,R3为轴承孔中心到摆线轮中心的距离;Fr1,Fr2,Fr3为位于轴承孔1,2,3中的3个保持架组件对摆线轮的作用力。
由于3个保持架组件均分摆线轮施加的力,则
Fr1=Fr2=Fr3,
(3)
由(2)式和(3)式可得每个保持架组件所受径向力为T/(6R1)。
2.3 圆锥滚子轴承
曲柄轴受力示意图如图5所示,在O,O3点受到圆锥滚子轴承的支承力;在O4点受到正齿轮的作用力带动曲柄轴旋转;在O1,O2点受到保持架组件的反作用力阻碍曲柄轴旋转。

图5 曲柄轴受力示意图
保持架作用在曲柄轴上的力为
F2y=F3y=T/(6R1),
(4)
则施加到曲柄上的扭矩为
(5)
式中:e为偏心距。
在O4点曲柄轴受到的扭矩T4为
T4=T2+T3=Te/(3R1),
(6)
在T4作用下,偏心轴在O4点受到的作用力F5y与F5z实际上是齿轮啮合过程中受到的切向力和径向力,故可得
T4=F5yR4,
把两根木棍摆成十字形,中间用黏土固定。在黏土球上绕好细绳,挂起来。现在,按照图中的样子拴好纸飞机。你能让它们保持平衡吗?
(7)
F5z=F5ytanα,
式中:R4为齿轮的节圆半径;α为齿轮压力角。
由(6)式和(7)式可得
F5y=Te/(3R1R4),
(8)
在xOz平面内
F1z+F4z-F5z=0,
(9)
F4zlOO3-F5zlOO4=0,
则
(10)
式中:lOO3为O与O3之间的距离;lOO4为O与O4之间的距离。
在xOy平面内
F1y-F2y+F3y-F4y-F5y=0,
(11)
F2ylOO1-F3ylOO2+F4ylOO3+F5ylOO4=0,
则
F4y=(F3ylOO2-F2ylOO1-F5ylOO4)/lOO3,
(12)
F1y=F2y-F3y+F5y+
(F3ylOO2-F2ylOO1-F5ylOO4)/lOO3。
式中:lOO1为O与O1之间的距离;lOO2为O与O2之间的距离。

3 实例分析
以帝人RV100C减速器为例,其结构参数见表1,其瞬时最大容许转矩为T=4 900 N·m,瞬时最大容许力矩为M1=4 900 N·m。

表1 RV100C结构参数
根据上述计算方法,角接触球轴承、保持架组件、圆锥滚子轴承所受的最大径向力分别为23.6,11.7,2.17 kN。
4 结束语
阐述了RV减速器的运动原理,从理论上提出了内部轴承的受力分析方法,并对帝人RV100C所用轴承进行了受力分析。研究表明,RV减速器主轴承(角接触球轴承)受力最大,保持架组件次之,圆锥滚子轴承受力最小,与实际使用情况相符,说明该理论分析的正确性,为RV减速器用轴承的设计和验证提供了参考。
