三线阵卫星影像无控测图立体模型选择方法
2016-07-18谢国华
谢国华
(61243部队,新疆 乌鲁木齐830006)
三线阵卫星影像无控测图立体模型选择方法
谢国华
(61243部队,新疆 乌鲁木齐830006)
摘要:三线阵卫星测绘系统能够同时获取前视、下视和后视三个视角影像,可两两组合成立体像对,为组建立体模型提供了多种选择。为了选择更合适的立体模型,本论述对单模型之间、单模型与区域网整体平差同名特征点及模型连接点的偏差进行了试验分析。试验表明:前后视立体像对测图精度相对其他类别像对来讲,整体偏差及模型间接边偏差都较小,观测盲区也较小,在不考虑视差对测图人员影响的情况下,可优先选择前后视立体模型测图。
关键词:三线阵卫星测绘;无控测图;立体模型
1 概述
随着遥感技术和空间技术的不断发展,卫星摄影测量已经成为人类获取地球空间信息的重要手段之一,在国民经济和国防建设中发挥着重要作用。利用三线阵CCD立体测绘相机所获取的立体影像及其姿态、轨道位置以及其他信息,可以在无地面控制点条件下测制地球等星球表面的地形图[1],从而有效的减弱了在沙漠、海洋、境外等困难地区获取地理信息对地面控制点的依赖。
在利用卫星影像进行测绘时,在保证卫星轨道定位精度、卫星姿态确定精度、时间同步精度和相机内方位元素的精度标定的前提下,所获得的卫星影像及位置姿态数据为后工序作业提供保证。测绘卫星发射后,由于受外界因素的影响,使传感器的内部结构产生细微的变化,直接影响内方位元素精度;在卫星定位过程中,星敏陀螺等测量设备的测量误差也对最终的定位结果产生影响[2,3]。因此,为得到满足精度要求的测绘成果,需要采用区域网平差方法来解算内外方位元素误差,以消除其对卫星定位的影响[4]。同时,空中三角测量作为内业测图的第一道工序,是测图的数学基础,也要保证其精度满足相应的技术指标[5]。在完成空三作业后进行立体测图时,三线阵立体测图卫星能够同时获取同一区域三个不同视角的立体模型,由于不同立体模型视角不同,模型间同名点的位置及高程也不完全相同,选择合适的立体模型不仅能够减小观测盲区,还能够提高测绘成果的相对精度。本论述针对以上问题,以国产某型号三线阵立体测绘卫星系统同时获取的某测区前视、后视、下视及同轨、异轨影像及系统参数为基础资料,通过对比分析不同模型同名特征点坐标偏移量的试验,提出了选择立体模型测图的方法。
2 方法与试验
本研究试验数据资料主要为国产某型号测绘卫星2014-04获取并经过几何和辐射校正的某高山区全色立体像对及其对应无控制点加密数据。地图成图采用2000中国大地坐标系和1985国家高程基准,比例尺为1:50000[6]。
2.1三线阵影像内部同名点坐标比对
利用三线阵影像原始RPC参数,恢复立体模型。在42个模型的四角和中心位置分别选取1个特征点,共选取210个特征点。分别量测这些特征点在前后、前下、后下三个立体像对上的坐标,得到同一特征点在不同模型中的三组坐标,再对三组坐标的X、Y、Z值两两比对,得出三线阵影像内部立体像对同名点的偏差情况[7]。
假设前后视模型下测量值为真值,通过观测,求得前后视和前下视各组同名特征点平均误差在X、Y、Z方向的最大值分别为-5.17m、6.51m、-5.33m,各组特征点中误差在X、Y、Z方向的最大值分别为10.44m、11.7m、8.75m。详细统计情况见表1。

表1 前后视与前下视比较结果统计表 单位:个
假设前后视模型下测量值为真值,通过观测,求得前后视和后下视各组同名特征点平均误差在X、Y、Z方向的最大值分别为-5.32m、-5.22m、-5.04m,各组特征点中误差在X、Y、Z方向的最大值分别为10.20m、11.38m、7.78m。详细统计情况见表2。
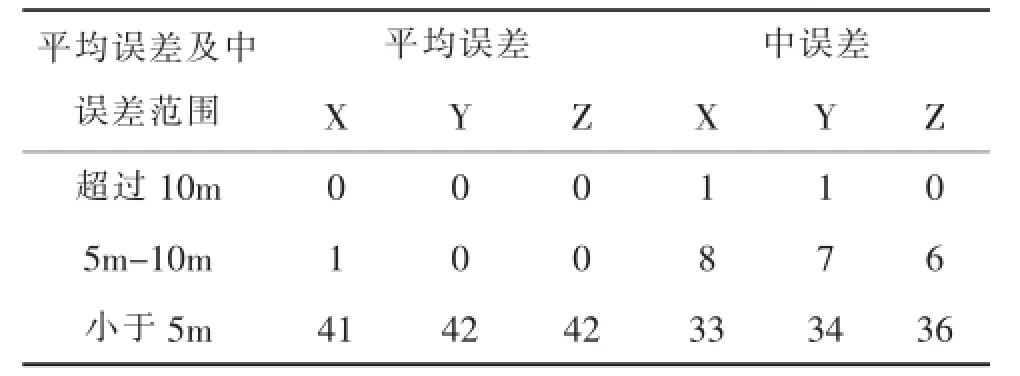
表2 前后视与后下视比较结果统计表 单位:个
假设前下视模型下测量值为真值,通过前下视与后下视比较,各组同名特征点平均误差在X、Y、Z方向最大值分别为-10.45m、-6.38m、-7.14m,各组特征点中误差在 X、Y、Z方向的最大值分别为12.10m、13.08m、8.76m。详细统计情况见表3。
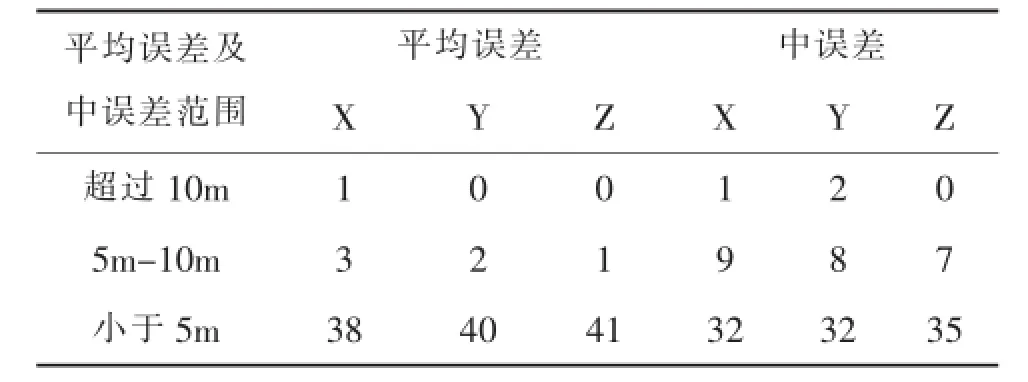
表3 前下视与后下视比较结果统计表 单位:个
2.2单模型与区域网整体平差后同名特征点坐标比对
以景为单位对三线阵影像单独建立工程,创建立体模型。在42个模型的四角和中心位置分别选取1个特征点并量测这些特征点在前后视、下后视、前下视三种立体像对中的坐标,再分别与区域网整体平差后模型中同名特征点的坐标进行比对。
假设区域网整体平差值为真值,通过比对,前下视、后下视像对中均有2个特征点X值超过10m、1个特征点Y值超过10m,前后视像对中特征点坐标值均未超过10m。单模型特征点组平均误差在X、Y、Z方向最大值分别为-11.29m、-15.54m、-13.81m,同名特征点组中误差在X、Y、Z方向最大值分别为4.26m、3.35m,3.62m。单模型与区域网整体平差比对示例见表4。
2.3测区公共模型连接点坐标比对
区域网整体平差完成后,在前后视、前下视、后下视3个类型像对上选取了210个连接点作为特征点,分别量取坐标值,与区域网整体平差后的模型进行比较,评判测区模型间接边偏差情况。假设区域网整体平差模型特征点坐标值为真值,经检测,测区公共模型连接点平均误差在X、Y、Z方向最大值分别为6.88m、5.48m、8.40m,连接点中误差在X、Y、Z方向最大值分别为10.87m、9.21m、12.43m。比对统计示例见表5。
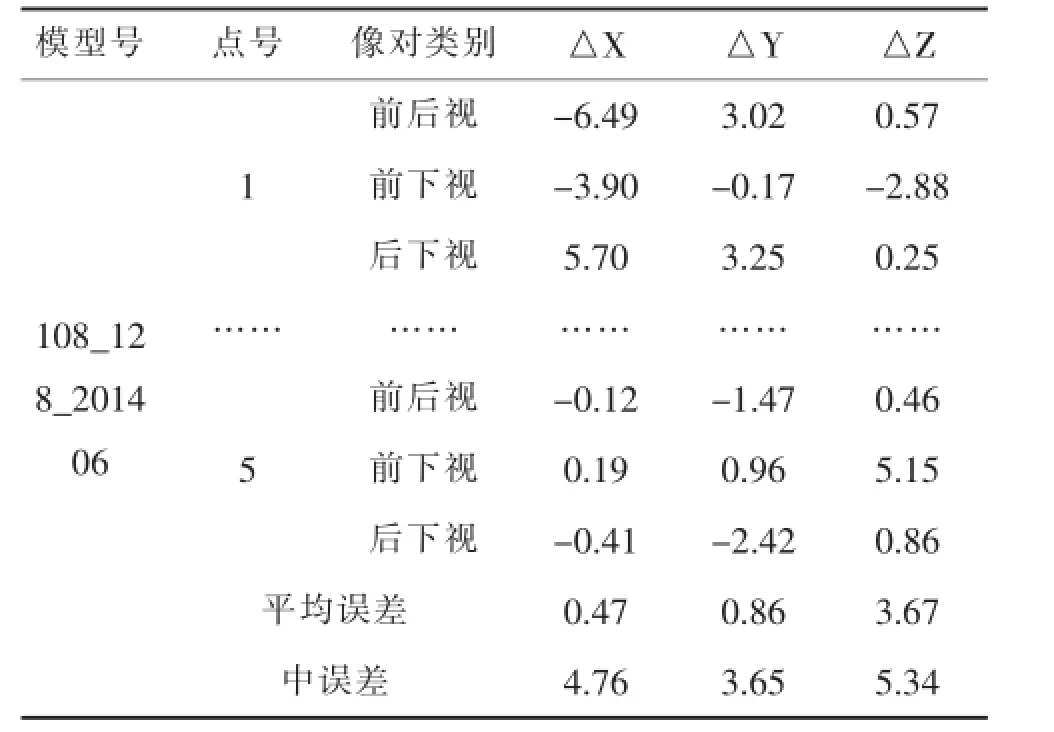
表4 单模型与区域网整体平差后比较结果统计表单位:m
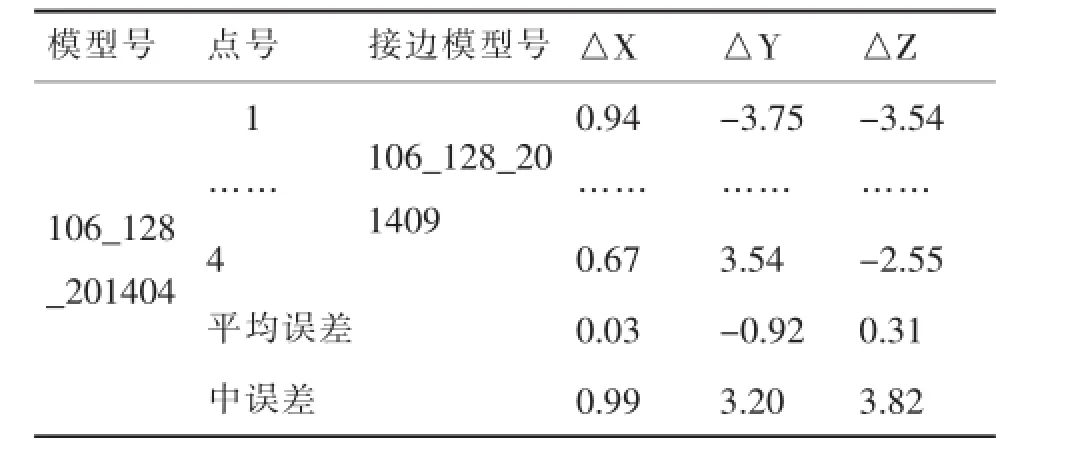
表5 公共模型特征点与前后视模型比较结果统计表 单位:m
3 结论
通过上述试验初步认为,本试验中原始三线阵影像内部精度基本一致,区域网整体平差后与原始立体模型精度一致,模型间接边相对中误差也满足1:50000地形图接边要求。前后视立体像对测图精度相对前下视、后下视像对来讲,整体偏差及模型间接边偏差都较小,同时能够减小观测盲区。因此在有多个立体像对可供使用的前提下,不考虑视差对测图人员造成的影响,可优先选择前后视立体模型测图。利用卫星影像进行无控制测图比较复杂,本论述只针对国产某型号三线阵卫星测绘系统对山地1:50000地形图测绘进行了粗浅的试验和数据分析,也没有野外检查点进行精度评估,为了得到可靠全面结论,还需对利用不同型号三线阵立体测绘卫星测绘不同困难类别、不同比例尺地形图等做全面的试验和评估。
参考文献:
[1]胡莘,曹喜滨.三线阵立体测绘卫星的测绘精度分析[J].哈尔滨工业大学学报,2008,40(5)695-699.
[2]唐新明,周平,张过,等.资源三号测绘卫星传感器校正产品生产方法研究[J].武汉大学学报:信息科学版,2014,39(3):287-294.
[3]王任享.三线阵CCD影像卫星摄影测量原理[M].北京,测绘出版社,2006.8.
[4]刘楚斌,张永生,范大昭,雷蓉.高分辨率三线阵卫星遥感影像的区域网平差算法与试验[J].测绘科学技术学报,2015,32(5):89-93.
[5]高文革,范永杰,宋倩,等.空三加密在数字摄影测量中的精度分析[J].山东国土资源,2010,26(12):26-29,33.
[6]GBT12340-2008地形图航空摄影测量内业规范 1: 250001:500001:100000[S].北京:测绘出版社,2008.
[7]GBT23236-2009数字航空摄影测量空中三角测量规范[S].北京:中国标准出版社,2009.
中图分类号:P236