门座起重机边下降边开斗功能控制系统设计
2016-07-16程粤
程 粤
龙口港集团有限公司
门座起重机边下降边开斗功能控制系统设计
程粤
龙口港集团有限公司
摘要:鉴于粘性较大货物作业时易粘附在抓斗壁上,坠落会对高压电缆和船舶设施造成损坏,需闭斗进舱,从而增加操作动作和作业时间的情况。为优化装卸工艺流程,设计了门座式起重机边下降边开斗功能控制系统。作业测试表明,达到了降低作业时间和提高作业效率的设计目标。
关键词:门座起重机; 粘性; 边下降边开斗; 装卸工艺
1前言
在龙口港大宗散货中,马来西亚铝矾土、印尼铝矾土、镍矿等粘性较大货种年接卸量在800万t 以上,船型以6~12万t为主,主要靠泊10万t码头,采用40 t门座起重机(以下简称门机)作业。门机主电缆敷设于码头前沿电缆沟内,供电电压10 kV,长190 m,价值较高。作业时为避免粘附在抓斗壁上的货物坠落砸伤高压电缆或船舶设施,需闭斗进舱,单台设备作业效率约280 t/h,远低于粘性较小的澳大利亚铝矾土、铁矿石、煤炭等货种的单台设备420 t/h的作业效率。
2装卸工艺流程分析
粘性较大货种作业工况较差,不易抓取,易粘附于抓斗壁上,抓斗抓取量相对较少,同时为保护高压电缆和船舶设施,闭斗进舱也是影响装卸效率的主要因素。将大宗散货按粘性大小分为2类,一类为粘性较大货种,如马来西亚铝矾土、印尼铝矾土、镍矿等,此类货种易粘附在抓斗壁上,需闭斗进舱;另一类为粘性较小货种,如澳大利亚铝矾土、铁矿石、煤炭等,此类货种不易粘附在抓斗壁上,正常作业即可。
2.1粘性较小货种装卸工艺流程
抓斗前沿货垛上方开斗放货→向左旋转至船舱上方→下降至船舱内货面→闭斗抓取货物→抓取货物后起升至船舱口→向右旋转至前沿货垛→前沿货垛上方开斗放货。如此反复。
2.2粘性较大货种作业工艺流程
抓斗前沿货垛上方开斗放货→闭斗同时向左旋转至船舱上方→下降至船舱内货面→开斗至终点→闭斗抓取货物→抓取货物后起升至船舱口→向右旋转至前沿货垛→前沿货垛上方开斗放货。如此反复。
2.3粘性大小对装卸工艺流程的影响
对货种粘性较小和粘性较大的装卸工艺流程进行对比分析,粘性较大的货种比粘性较小的货种装卸工艺流程多了抓斗闭斗和抓斗开斗2个动作。抓斗闭斗是在旋转进舱的过程中完成的,实际操作不会增加作业时间。抓斗开斗动作需独立完成,增加作业时间。
3粘性较大货种装卸工艺流程优化
粘性较大货种抓斗自船舱口上方至舱内货面下降的同时完成开斗动作,即抓斗自船舱口至舱内货面下降的过程中,支持机速度不变或略微减小,开闭机速度增大,在抓斗自船舱口上方至舱内货面下降的时间内,利用支持机与开闭机相对速度差完成抓斗开斗动作。
3.1MQ40-37门机概况
MQ40-37门机额定起重量40 t(含约60 t的抓斗自重),工作幅度12~37 m,起升速度50 m/min。PLC采用GE Fanuc90-30,主、从两站控制。起升机构开闭、支持电机额定功率均为250 kW,采用安川CIMR-G7B 300 kW变频器驱动。PLC与变频器之间通过IC693PBM200通讯模块、变频器SI-P1通讯卡建立通讯连接,PLC、变频器和电动机之间的速度给定、力矩给定、力矩补偿、输出电流、输出频率、PG速度检测、速度反馈等以通讯字的形式通信。
3.2抓斗自动开闭斗功能
起升电动机轴流风机侧配有旋转增量式编码器,与变频器、电动机共同构成闭环控制回路[1-2]。设定自动开闭斗功能时,PLC通过IC693APU300分别检测和计算抓斗开斗终点、闭斗终点的开闭机和支持机编码器相对位置,并赋值、保存。自动开闭斗功能设定完毕后,在抓斗自动状态下,抓斗最大开斗幅度和闭斗幅度一定,即抓斗至开斗终点时,不能继续开斗,至闭斗终点时,不能继续闭斗。抓斗幅度大小在0~80% 范围内开闭斗速度为100%,在80%~98% 范围内速度为50%,在98%~100% 范围内速度为0,以减小闭斗速度过快对抓斗底韧板的冲击。
3.3边下降边开斗功能控制系统设计
3.3.1控制系统设计原则
(1)操作习惯:原有功能和动作保持不变;易于操作,符合门机司机的操作习惯。
(2)使用功能:能够自动检测张斗终点,无需操作人员指挥和操作;适型船舶抓斗自船舱口上方至舱内货面的时间内能打开抓斗;对电动机、变频器等设备无影响,对使用功能无影响。
(3)安全功能:使用安全,操作简单,不会造成误动作[3]。
3.3.2控制系统设计
按照控制系统设计原则,对边下降边开斗功能控制系统进行设计,控制线路、PLC系统、变频器系统变更内容见表1。
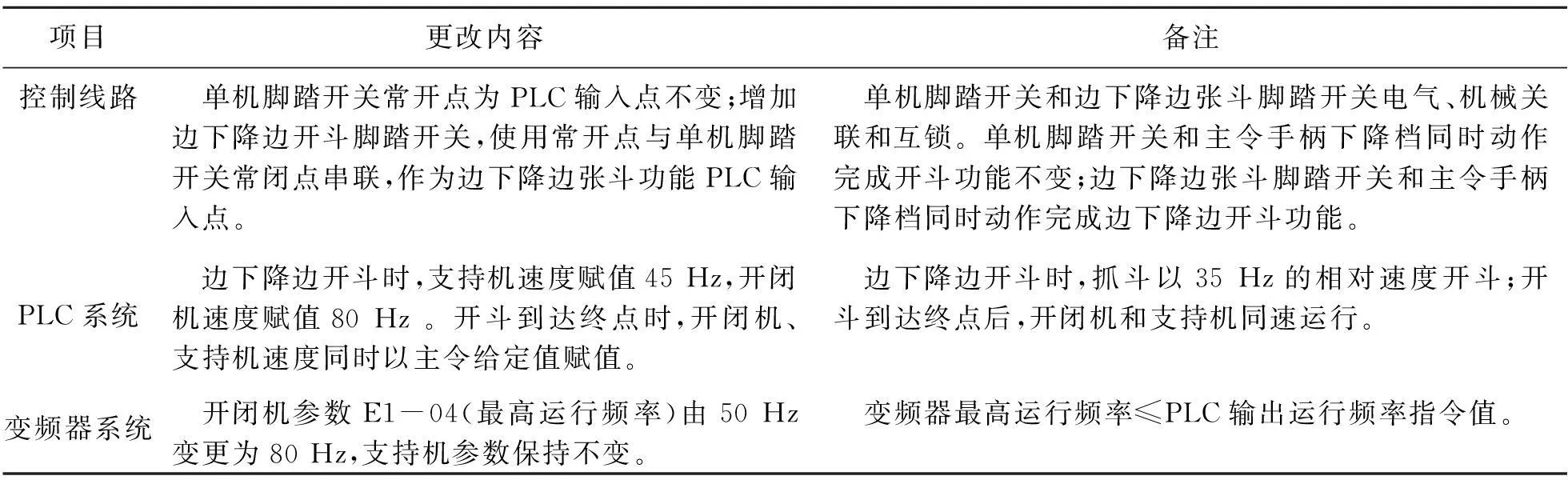
表1 边下降边开斗控制系统变更
单机脚踏开关:与起升主令手柄操作动作配合实现抓斗开闭斗功能。单机脚踏开关与起升主令手柄上升档同时动作,开闭机以主令手柄给定速度上升,支持机制动器打开,支持机电机不工作,抓斗闭斗;单机脚踏开关与起升主令手柄下降档同时动作,开闭机以主令手柄给定速度下降,支持机制动器不打开,支持机电机不工作,抓斗开斗。
3.3.3边下降边开斗功能
作业前,抓斗开斗至需要的开斗幅度,按驾驶室操纵台“开斗设定”按钮,PLC对此时的开闭机与支持机相对位置进行检测、计算、赋值和记忆。边下降边开斗脚踏开关与起升主令手柄下降档同时动作,抓斗以35 Hz相对速度开斗(开闭机80 Hz速度运行,支持机45 Hz速度运行),至抓斗设定的开斗幅度后,支持机、开闭机改由50 Hz同速运行,直至起升动作停止。
3.4边下降边开斗功能实施后粘性较大货种作业工艺流程
抓斗前沿货垛上方开斗放货→闭斗同时向左旋转至船舱上方→边下降边开斗→闭斗抓取货物→抓取货物后起升至船舱口→向右旋转至前沿货垛→前沿货垛上方开斗放货。如此反复。
对粘性较大货种新的装卸工艺流程与粘性较小货种装卸工艺流程进行比较,粘性较大货种“闭斗同时向左旋转至船舱上方→边下降边开斗”与粘性较小货种“向左旋转至船舱上方→下降至船舱内货面”不同,“闭斗同时向左旋转至船舱上方”中闭斗是在旋转进舱的过程中完成的,实际操作不会增加作业时间。“边下降边开斗”与“下降至船舱内货面”所用时间基本相同,因此边下降边开斗功能实施后,粘性较大货种作业工艺流程与粘性较小货种装卸工艺流程所用时间基本相同。
4可行性分析
4.1控制系统设计原则符合性
(1)操作习惯:作业前设定开斗幅度,与抓斗自动开闭斗功能设定相同;抓斗开斗是单机脚踏开关动作与主令手柄下降档动作,边下降边开斗功能是边下降边开斗脚踏开关与主令手柄下降档动作,2个功能都是开斗操作,操作方式相同。
(2)使用功能:单机脚踏开关常开点为PLC功能输入点保持不变,常闭点与边下降边开斗脚踏开关常开点串联作为PLC功能输入点,2个功能由各自的脚踏开关独立、联锁控制;在抓斗自船舱口上方至船舱货面下降过程中,能够边下降边开斗至设定的开度,并自动检测、执行支持机和开闭机同时全速运行。
(3)安全功能:使用安全,操作简单;在边下降边开斗脚踏开关和主令手柄下降档同时动作时,该功能方可实现,上升和闭斗等其他动作无此功能,对其他使用功能也无影响。
4.2电动机变频调速
异步电动机定子每相电动势有效值
E1=4.44f1N1knφm
其中:E1为定子每相绕组有效匝数;f1为电动机定子电源频率;φm为磁通量;kn为定子绕组系数。
异步电动机转矩
其中:PN为电动机额定功率;nN为电动机的额定转速;P为电动机极数;f为电动机运行频率;s为电动机转差率。
MQ40-37门机起升电动机额定功率250 kW,变频范围1~100 Hz,电动机极数6极,额定转速990 r/min。
根据异步电动机转矩公式,分别对50 Hz和80 Hz时的电机转矩进行计算。
50 Hz时电动机转矩
80 Hz时电动机转矩
4.3电动机变频调速
电动机基频以下为恒转矩调速,主磁通Φm保持不变,感应电动势E1/电源频率f1为定值,以保证电动机负载能力;基频以上为恒功率调速,感应电动势E1保持380 V不变,主磁通Φm/电源频率f1为定值。
电动机输出转矩:抓斗抓满货(货物加抓斗重40 t)时电动机扭矩为1 840 Nm,抓斗空斗(抓斗重约16 t)时电动机扭矩为335.9 Nm。电动机50 Hz以下为恒转矩调速,电动机转矩为2 411 Nm,50~80 Hz为恒功率调速,电动机额定转矩由2 411 Nm逐渐降至1 507 Nm,符合要求。
电动机工作频率:电动机工作频率范围为15~80 Hz,在电动机运行允许的1~100 Hz工作范围内。
5结语
对同一船舶、同一货种、同一工况的门机作业情况进行测试(持续作业12 h后测试,1台门机正常作业,1台门机使用边下降边开斗功能),电动机、变频器运行和作业情况良好,符合设备性能和装卸作业要求。电动机工作电流正常作业时200 A(50 Hz), 使用边下降边开斗功能时120 A(80 Hz)。电动机工作电压正常作业时380 V(50 Hz),使用边下降边开斗功能时380 V(50~80 Hz)。电动机表面温度正常作业时37 ℃,使用边下降边开斗功能时36 ℃。
对粘性较小和粘性较大货种作业进行测试,粘性较小货种单次作业循环时间约138 s,粘性较大货种单次作业循环时间约154 s,抓斗开斗动作时间约14 s;使用边下降边开斗功能后,粘性较大货种单次作业循环时间约142 s,作业效率310 t/h,作业效率提高约10%,达到了预期要求。
参 考 文 献
[1]程粤. 基于PLC的圆盘锯石机自动化改造[J]. 机床电器, 2008(6):42-43.
[2]程粤. 全自动硫磺灌包机防堵转系统设计[J].机床电器, 2010(1):53-55.
[3]朱学军. PLC顺序控制方法研究[J]. 组合机床与自动化加工技术, 2003(11):31-39.
[4]Pavlovic, R. Pinger and M. Kollmann, “Automated Formal Verification of PLC Programs Written in IL,”Conference on Automated Deduction (CADE), Bremen, July 2007:152-163.
程粤: 265700 , 山东省龙口市环海路1899号
Design of the Control System for Opening Portal Crane′s Grab While Descending
Long Kou Port Group Co.,Ltd.Cheng Yue
Abstract:Cargos with viscosity can easily adhere to the grab bucket and a falling cargo can do damage to the high voltage cable and ships. In this case the grab should be closed when moving into the cabin, which increases the operation step and time. To optimizing the handling process, a control system which can realize the opening of the grab while descending, is designed for the portal crane. Operation tests show that the design goal of reducing the operation time and increasing the working performance is reached .
Key words:portal crane; viscous; opening the grab while descending; cargo handling technology
收稿日期:2015-11-10
DOI:10.3963/j.issn.1000-8969.2016.03.008
