基于DSP6713的船舶航向控制器设计实现
2016-07-06中国船舶重工集团公司第七四研究所上海200031
陈 潇(中国船舶重工集团公司第七〇四研究所,上海,200031)
基于DSP6713的船舶航向控制器设计实现
陈 潇
(中国船舶重工集团公司第七〇四研究所,上海,200031)
摘要:船舶航向控制器作为船舶自动化的组成部分之一,为了使航行船舶能在受扰情况下实现稳定、快捷的航向控制,系统在硬件设计上采用TMS320C6713数字信号处理器(DSP)配合以TL16C752B、MAX3160为核心的数据通信模块,在算法设计上系统采用变论域模糊控制通过实时控制舵角输出实现船舶航向的精确控制。测试结果表明, 系统能实现船舶航向的智能控制,其控制精度指标符合船舶航向控制系统的应用要求。
关键词:船舶航向控制; TMS320C6713;变论域模糊控制
随着造船技术的日渐成熟,新建船舶正向着高速化、巨型化方向发展,其控制难度逐渐增大。船舶航向控制技术作为船舶自动控制领域的重要组成部分,其研究与应用在近几十年来取得了长足进步。目前以专家系统、模糊控制、神经网络等控制算法为核心的第四代自动舵系统,因其控制精度高、适应性强等特点,正被广泛应用在船舶航向控制系统之中。然而传统的航向控制器因其运算速度慢、数据传输方式单一等缺点,使得控制算法的应用受到了一定限制,为此,本文通过采用以TI公司生产的高速浮点型数字信号处理器TMS320C6713为核心的航向控制器,配合以TL16C752B、MAX3160为核心的数据通信模块实现支持多通信协议的航向控制器设计。该航向控制器采用变论域模糊控制实现船舶航向智能控制,与传统航向控制器相比,该系统具有运算速度快、适用性强等特点。
1 船舶航向控制系统结构
目前比较常见的船舶航向控制系统主要由上位机、航向控制器、舵伺服系统等部分组成。其中上位机作为数据参数的发送端,主要实现航向控制值的设定及当前船舶所受扰动量的输入;航向控制器则在结合相关数据的基础上经过智能算法运算实现控制舵角值的输出;最后由舵伺服系统实现舵机控制及当前舵角反馈,以此实现船舶航向智能控制。
2 船舶航向控制器系统概述
航向控制器作为船舶航向控制系统的数据处理核心,通过实时采集上位机发送的航向指令及海浪干扰值并将其与当前航向值进行智能控制算法运算,将运算所得的控制舵角值发送至舵伺服系统,同时通过采集当前舵角值并通过船舶数学模型运算获取当前航向值以实现船舶航向闭环控制。其工作原理图如图1所示。
3 航向控制器设计实现

图1 船舶航向控制器框图
由于该航向控制器采用高频工作设计,故在电路设计上应遵守相应的设计规范和准则。其硬件电路主要由数据处理模块、数据通信模块及电源模块三部分组成。
3.1 数据处理模块
该船舶航向控制器数据处理模块采用以TMS320C6713作为核心处理器,由于其内部集成化较高,在电路设计上可进行很大程度的简化。因此在该DSP芯片的基础上仅需配置复位电路、时钟模块、外部存储器及JTAG接口即可实现数据处理模块的设计。为实现信号缓冲驱动、电路过压保护,系统采用74CBTD4总线开关实现JATG口的顺畅通信。同时为实现程序和数据的存储,系统采用SST39VF1601 FLASH芯片作为外存储芯片,其使能端与TMS320C6713的CE1端连接,以实现该存储器的引导与装载。在复位芯片的选择上系统采用MAX706实现系统复位功能。
3.2 数据通信模块设计
由于船舶航向控制器在工作过程中须与上位机及舵伺服系统进行数据通信,故在数据通信模块的设计上须设置两个数据传输通道。同时为了增强航向控制器的适用性,其通信协议满足当前常见舵伺服系统的配置。基于上述原因该数据通信模块采用支持双串口通信的TL16C752B异步串行通信协议芯片和能满足RS232/RS485双串口通信的MAX3160多协议收发器相配合设计以实现设计要求。
为满足双串口通信的应用要求在系统设计上还须将不同通道数据映射于相应的地址以实现数据在通信过程中的中转存储。故系统采用CE3与ADDRESS19及ADDRESS20经SN74F32或门芯片实现不同通道芯片的使能选择及存储地址的确定。同时系统通过改变MAX3160第8管脚的电位以实现通信协议的选择。
4 系统测试及结果分析
可通过将该航向控制器搭载于航向控制系统之中并对其软件参数进行校验以实现较为精准的航向控制。在测试过程中假设舵伺服系统能实现舵角值的准确控制,即假设舵伺服系统反馈舵角值与其控制值相等,以此简化测试流程。
图2所示分别为无控制状态(曲线A)、传统模糊控制算法(曲线B)及变论域模糊算法(曲线C)状态下经该航向控制器运算得出的零度维稳航向变化曲线。如图可知,较传统的模糊算法相比变论域模糊算法能较好的实现干扰状态下船舶航向的稳定控制。
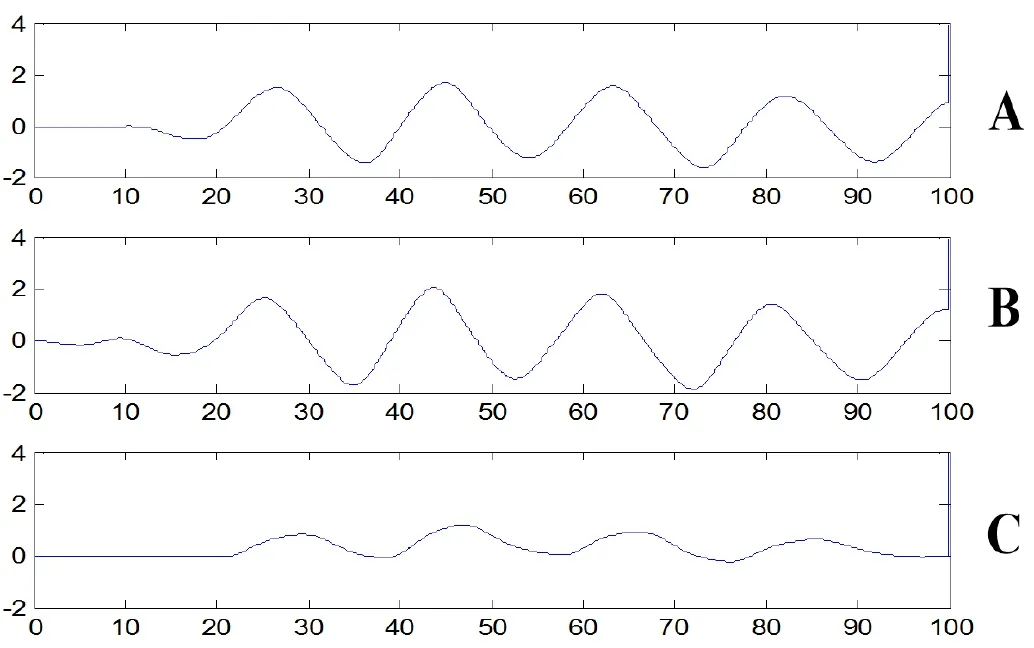
图2 不同控制算法下船舶零度维稳曲线
由于该航向控制器需实际应用于船舶航向控制系统,故其在程序设计上还应考虑舵伺服系统的客观性能指标,故在程序设计上,应时刻保证输出舵角在之间,且舵角变化率小于等于。为此在程序设计过程中,仍须添加限幅子程序,以最终实现应用于船舶航向控制的智能算法设计。
5 结束语
本文阐述了以DSP TMS320C6713为核心的船舶航向变论域模糊控制器的原理、功能以及测试结果, 总的来说此船舶航向控制器性能具有以下特点: ①其硬件结构可以基本实现船舶航向控制期的应用要求;②所采用的变论域模糊算法可实现船舶航向的智能控制;③经过仿真测试,该船舶航向控制器能实现船舶航向的智能控制,其控制效果与仿真结果较为吻合。
参考文献
[1]王立军,王思思,毕修颖,变论域自适应模糊PID混合控制自动舵设计[J]. 交通信息与安全,2010.6
[2]黄鹏,基于DSP的船舶机舱自动化系统控制器研究[D].重庆:重庆大学硕士学位论文,2010.
The Design and Implementation of Ship Course Controller Based on DSP6713
Chen Xiao
(No. 704 Institute of China Shipbuilding Industry Corporation(CSIC),Shanghai,200031)
Abstract:The ship heading controller was one part of ship automation.In order to control the sailing ship stably,the system used TMS320C6713 digital signal processor(DSP)and data communication module which was made by TL16C752B and MAX3160.The system used RS232/RS485 data transmission to achieve the data transmission,and output the rudder angle value which was computed by variable universe control.The test results indicated,this system could realize the intelligent control of heading,and the precision of this system met with the demand of navigation requirements.
Keywords:heading control;TMS320C6713;variable universe fuzzy control
