组网雷达的集中式数据融合技术研究
2016-07-0491245部队葫芦岛125000
王 乾(91245部队,葫芦岛,125000)
组网雷达的集中式数据融合技术研究
王 乾
(91245部队,葫芦岛,125000)
摘要:组网雷达能够从不同角度对海空域进行探测,获取多方位的数据,利用数据融合处理能够提高对目标的探测能力。集中式数据处理方法可分为点迹合并式和串行合并式,本文针对串行合并式的坐标显示问题进行了仿真分析。
关键词:组网雷达;数据融合;集中式;串行合并式
0 引言
雷达系统数据融合通常是在信息处理中心完成的,每部雷达将各自发现的目标坐标数据送往信息处理中心,进行数据融合,这就是所谓的集中式多雷达数据融合处理方式。每部雷达送来的航迹,通常称为局部航迹,融合之后形成的航迹通常称为全局航迹或系统航迹。根据不同的雷达网络结构,融合又分点迹融合和航迹融合。有时融合系统的结构确定了信息处理的关系,甚至影响其系统的性能。一般集中式网络结构采用点迹融合,分布式结构采用航迹融合,由于点迹融合利用的是各部雷达的原始点迹,性能略高于航迹融合。
集中式多雷达数据处理方法可分为两类:点迹合并式和串行合并式。点迹合并又称为数据压缩的方法。串行合并又称为点迹-航迹合并算法。
1 串行合并式
串行合并又称为点迹-航迹合成式,它较点迹合并式简单。它在实际中有着广泛的应用。它是将多雷达数据组合成类似单雷达的探测点迹用于点迹-航迹的互联。点迹数据流合成的原理图1所示。

图1 集中式雷达数据流合成图
根据上图不难看出,点迹-航迹合成式的一个显著特点是合成后的数据流数据率加大,这意味着跟踪精度的提高,尤其两部雷达都受到干扰后检测概率下降的情况下,每部雷达对目标都很难进行连续跟踪,即跟踪精度大大降低,采用上面的方法可以较好地解决检测概率下降情况下提高跟踪精度问题。本文对其中的坐标显示问题进行了仿真分析。
2 目标运动模型的建立
多雷达数据融合数学模型的实现是建立在目标运动的状态方程上的,在直角坐标系统某一坐标方向上,目标运动的数学模型可用下列差分方程来描述,

(2.1)、(2.2)式可用状态方程表示为
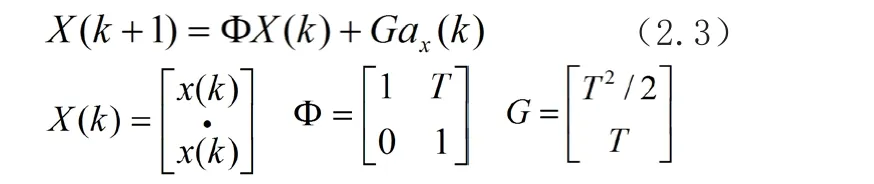
初始条件X(0)假定是高斯随机变量,均值为mx(0),方差为px(0),以上只考虑了坐标系统的一个坐标方向,如考虑多维情况,如平面坐标系统,则系统的状态方程为
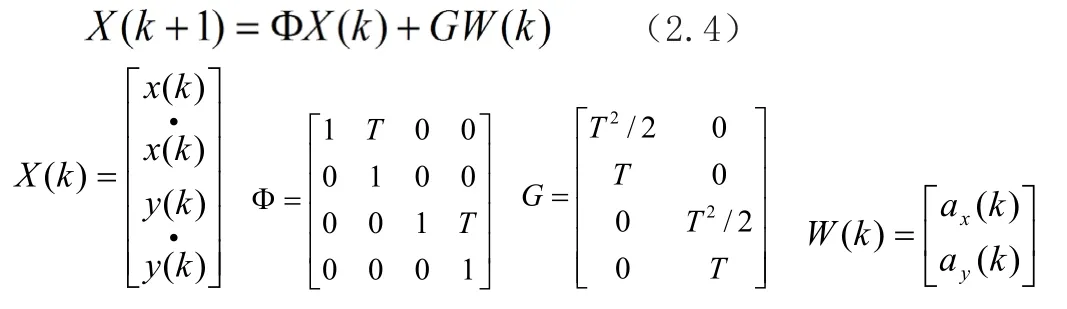
W(k)是高斯随机序列,均值为零,方差阵为Q,一种简单的情况是Q=I ,这意味着两个坐标方向上加速度相互独立,且有相同的方差,方程也很容易扩展到三维情况,这时状态变量是六维的矢量。
以三部雷达为例,先看雷达1航迹的建立
雷达1的扫描周期:T
在实际情况下雷达对目标的探测是存在量测噪声的,这就不得不引入量测方程
Z(k)=H(k)X(k)+V(k)
这里,Z(k )∈Rm是传感器在k 时刻的观测向量,观测噪声V(k )∈Rm是具有零均值的和正定协方差矩阵R(k)的高斯分布测量噪声向量,即

再根据式(2.4)就可以建立雷达1的航迹,
其余两部雷达航迹的建立方法如上。
串行合并式就是将多部雷达在同一时刻探测目标的数据放在一起,方法如图1所示。 至此,我们利用上述公式建立了集中式多雷达数据融合的数学模型。
3 仿真测试分析
3.1 仿真环境设定
3.1.1 设雷达1与辐射源目标初始距离为x1= 1 000 m , y1= 1 500 m ,测距误差和测角误差为,采样周期;雷达2与辐射源目标初始距离为,,测距误差和测角误差为,采样周期,设目标作匀加速直线运动。目标初始速度为。蒙特卡洛实验次数串行合并式中N=10,点迹合并式中N=100。
3.1.2 仿真在两种坐标系下显示。然后再进行比较。
3.1.3 在实际条件下引起误差的因素有多种,一般都设定误差属于高斯分布,在仿真中,假设状态误差和量测误差都服从高斯分布。
3.2 串行合并式下各种情况的比较
在串行合并式中,采用不同坐标相同周期、采用相同坐标不同周期的显示以及在不同坐标下进行插值,然后对其进行比较。
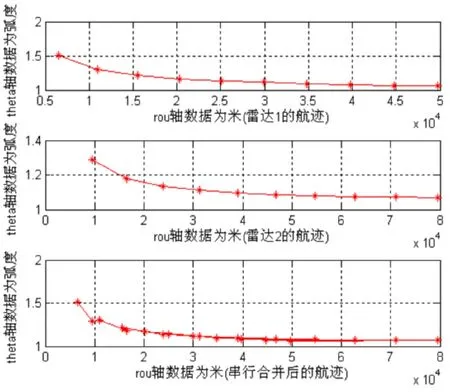
图2 极坐标下显示(周期不同)的仿真图
在相同坐标下(周期相同与不同):
测试一:在极坐标系下显示(周期不同)
测试二:在极坐标系下显示(周期相同)

图3 极坐标下显示(周期相同)的仿真图
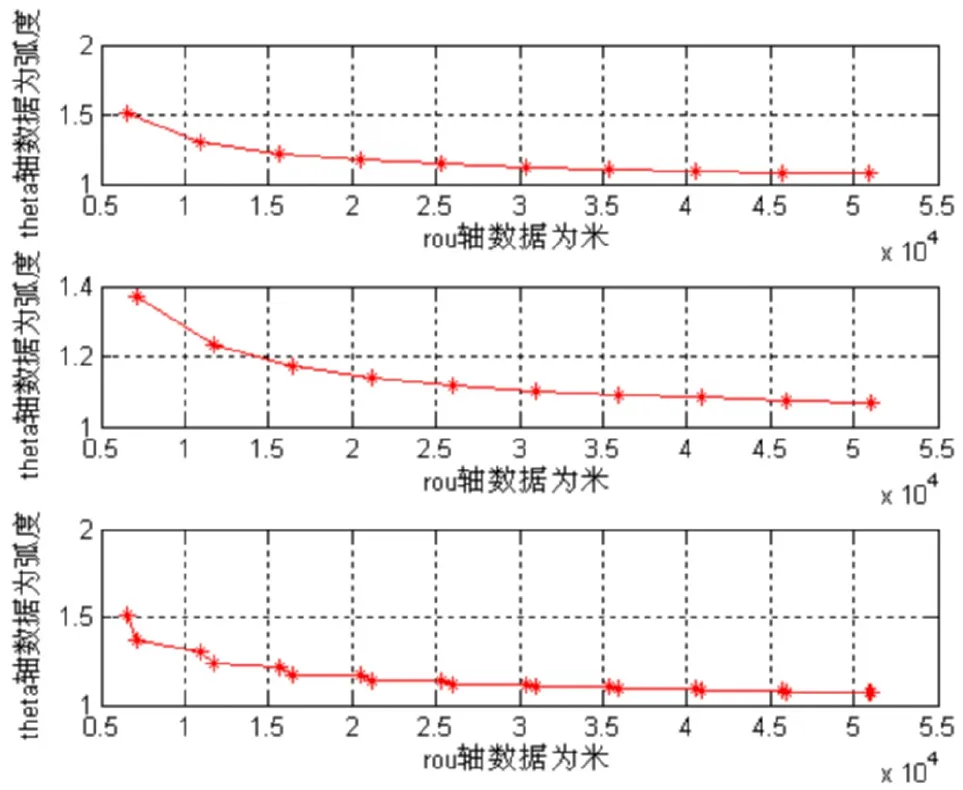
图4 极坐标下显示的仿真图
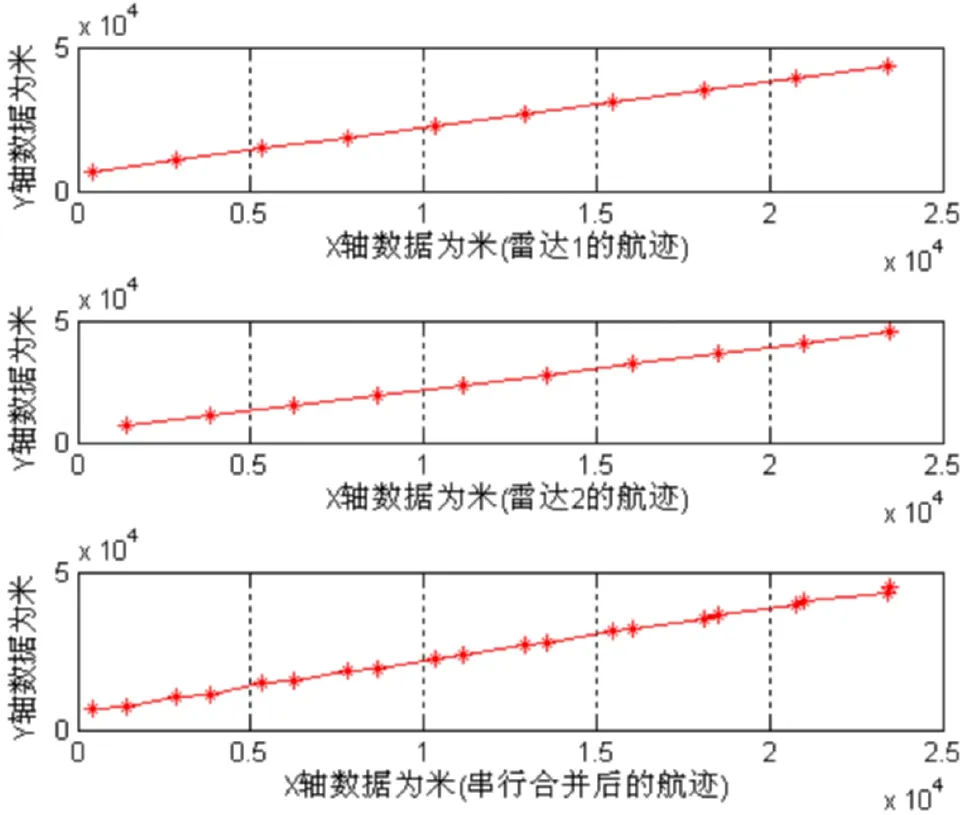
图5 直角坐标下的仿真图
比较测试一和测试二仿真图我们可以看出周期的异同对串行合并航迹的影响。当两部雷达(开机时间不同)扫描周期不同时,有可能在相同时刻探测到同一目标,合并后航迹图上点的个数就小于两部雷达航迹图上点数之和,这样探测精度就会降低,效果不是很好。而扫描周期相同时,则不会出现上述情况,跟踪精度会提高。
采用不同坐标显示:
测试一:在极坐标下显示
测试二:在直角坐标下显示
比较测试一和测试二仿真图我们可以看出:在直角坐标下显示,由于图中数值较大不利于和初值进行比较,不够直观。而在极坐标下显示,数值相对较小,易于和初值进行比较。所以用极坐标显示效果比较好。
4 总结
本文主要是在集中式系统结构下研究组网雷达的数据融合算法,并通过仿真评估不同算法的效能:比较分析了串行合并式的仿真图用何种坐标显示较好。由于时间有限,本论文对许多其它情况没有进行讨论,例如在确定测角误差不变的情况下,改变测距误差的大小;或者在保持测距误差不变的情况下,改变测角误差的大小等情况的比较。
集中式多雷达数据融合技术已经在军事领域得到广泛应用,我相信随着微电子、计算机等科学技术的不断进步,集中式多雷达数据融合技术必将得到大力发展。
参考文献
[1]刘福声,罗鹏飞.统计信号处理[M].国防科技大学出版社,1999:190-195.
[2]杨万海等.多传感器数据融合及其应用[M].西安:西安电子科技大学出版社,2004:23-43.
[2]张威.MATLAB基础与编程入门[M].西安:西安电子科技大学出版社,2004:2.
Research on centralized data fusion technology of Networking Radar
Wang Qian
(Unit 91245 of PLA,Huludao,125000)
Abstract:Radar network can from different angles of sea airspace detection,access to a range of data,using data fusion to improve the target detection ability.Centralized data processing method can be divided into tracks merge type and serial combined,this paper aiming at the problem of displaying the serial combination of coordinates were simulation analysis.
Keywords:Networking Radar;data fusion;centralized;serial combination
