单轴旋转捷联惯导系统姿态和航向角在线组合校正
2016-06-24程向红朱倚娴
胡 杰 程向红 朱倚娴 黄 骏
(东南大学微惯性仪表与先进导航技术教育部重点实验室,南京210096)
单轴旋转捷联惯导系统姿态和航向角在线组合校正
胡杰程向红朱倚娴黄骏
(东南大学微惯性仪表与先进导航技术教育部重点实验室,南京210096)
摘要:为了提高工作在水下环境下的单轴旋转捷联惯导系统的导航定位精度,给出了惯导系统姿态和航向角在线组合校正流程,提出了一种基于速度信息的旋转式捷联惯导系统二次对准方法.利用速度信息和Kalman滤波技术进行姿态和航向角误差最优估计,同时周期性转动惯性测量单元以提高系统的可观测性.计算机仿真和转台验证实验结果表明,系统经过二次对准后,后续纯惯性模式下的定位精度明显提高,仿真实验中定位误差由4.52 n mile减小为2.19 n mile,转台实验中定位误差由4.28 n mile减小为2.06 n mile.
关键词:单轴旋转; 捷联惯导系统;二次对准;误差校正
捷联惯性导航系统(SINS)的定位精度主要由系统所采用的陀螺和加速计精度决定.提高SINS定位精度主要有2种途径:① 提高惯性测量单元(IMU)的自身精度;② 采用系统级补偿方法减小漂移误差[1].相比之下,后者具有成本低、实现简单、见效快等优点.旋转调制技术是一种惯性器件误差自补偿方法,它通过周期性旋转IMU来抵消器件偏差对系统精度的影响.国外激光陀螺旋转SINS现已应用于军用舰船中,而高精度光纤陀螺旋转SINS也在进一步研制中[2-3].
国内许多研究机构对旋转调制型SINS进行了研究[4-6].文献[7]对光学陀螺旋转惯导系统的原理进行了探讨,给出一种8次180°翻转IMU旋转方案;文献[8-9]建立了转轴陀螺常值漂移误差与系统经度之间的数学模型,利用经度误差估计转轴方向的陀螺误差,但该方法需要先进行长时间导航解算以得到经纬度误差;文献[10]提出了一种新的单轴旋转调制方案,可消除所有方向上的陀螺常值误差,但需要制作特定的转位机构,在工程实现上仍需进一步论证;文献[11]对旋转SINS初始对准方法进行了研究,发现在对准过程中转动IMU能够提高对准精度.综上可知,利用单轴旋转SINS消除或减小转轴方向上的陀螺误差对于提高系统精度至关重要.目前的研究主要集中在利用经度误差计算轴向陀螺常值漂移上,该方法需要较长的准备时间,且载体需要处于静止状态.区别于上述研究工作,本文所研究的单轴SINS应用于水下载体,单轴旋转SINS间隔一段时间接收卫星信号进行误差重调,同时利用速度信息对姿态和航向角进行在线自校准,此过程可看作是二次对准.本文首先对单轴旋转SINS误差调制原理进行分析,建立了惯导系统二次对准状态方程和量测方程;然后针对该系统实际工作需求,提出了一种在线组合校正方法.最后,进行了数学仿真实验和转台验证实验.结果表明,本文所提出的在线组合校正方法能够提高系统导航定位精度,具有实际应用价值.
1旋转调制补偿原理与导航算法
单轴旋转SINS中,IMU安装在转位机构上,转位机构可以使IMU绕旋转轴周期性转动.令转动坐标系为s系,表示为oxsyszs;其余坐标系与常规捷联惯导系统一致,分别为载体坐标系(b系,oxbybzb)、导航坐标系(n系,oxnynzn)以及惯性坐标系(i系,oxiyizi).
初始时刻旋转坐标系与载体坐标系重合,系统通电后IMU坐标系开始以角速度Ω绕ozb轴转动,两者之间的夹角为α,它们之间的转换矩阵为
(1)

(2)

旋转坐标系s系中陀螺和加速度计信息为
(3a)
(3b)

将式(3)代入式(2)中可得
(4a)
(4b)

由式(4)可知,水平方向上的陀螺和加速度计常值误差经过旋转调制后变为周期性误差量,在一个周期内其积分为零.与转轴平行方向上的惯性量误差无法被调制,其对导航精度的影响依然存在.
2旋转式捷联惯导姿态角组合校正
在静基座条件下,SINS的可观测性较差,当采用Kalman滤波技术进行姿态估计与补偿时,等效东向陀螺常值误差不可估计.文献[12]指出,东向加速度计偏置和东向陀螺漂移决定方位角收敛精度.为提高系统估计精度,可以转动IMU进行多位置测量[13].在单轴旋转捷联惯导系统中,转动IMU同样能够提高系统的可观测性.
2.1系统状态方程

(5)
建立适合的状态空间模型,并利用Kalman滤波器对状态向量进行最优估计,状态方程为

(6)
式中, A为系统状态转移矩阵;X为状态向量;W为系统噪声向量;δvE,δvN分别为东向和北向速度误差;φE,φN,φU分别为东向、北向和天向失准角;δax,δay分别为oxb,oyb两个方向上的加速度计输出噪声;δωx,δωy,δωz分别为oxb,oyb,ozb三个方向上的陀螺输出噪声.
系统噪声向量W中的前5个量为加速度计和陀螺仪的随机噪声,且均为零均值的白噪声.根据单轴旋转SINS误差方程可以得到系统状态转移矩阵为
式中

2.2量测方程
选取2个水平速度误差δvE,δvN为观测量,量测方程为
(7)
3组合校正流程与仿真验证
3.1组合校正流程
单轴旋转SINS在线组合校正是针对SINS工作一段时间后航向角误差积累引起的导航误差而展开的.SINS初始对准结束后工作在纯惯性模式下,工作一段时间后导航信息逐渐积累,无法满足系统长时间工作的需求.为了提高惯导系统的定位精度,利用卫星导航系统对单轴旋转SINS进行位置误差重调.在此期间,如果能同时对姿态和航向角误差进行估计和校正,将会有效减小下阶段由航向角误差引起的定位误差.本文设计的单轴旋转SINS工作流程如图1所示.图中的二次对准表示将速度、位置重调与姿态和航向角在线校正同时进行.

图1 单轴旋转捷联惯导系统工作流程
3.2仿真结果及分析
初始经度和纬度分别为106.690 6°和26.501 9°.系统工作在摇摆条件下,姿态角变化规律为:俯仰角θ=5°sin(2πt/5),横摇角γ=2°sin(2πt/1.25),航向角ψ=5°sin(2πt/5),其中t为工作时间.
单轴旋转SINS完成初始对准后进入纯惯性工作模式.图2为单轴旋转SINS工作6h引起的水平姿态和航向角误差.图中,Δθ,Δγ,Δψ分别为俯仰角误差、横摇角误差和航向角误差.由图可知,6h惯性导航解算后,航向角误差为2.2′,若不进行修正,则该项误差将会耦合到下一导航过程中.
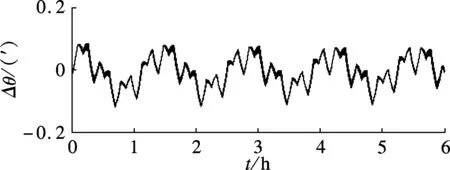
(a) 俯仰角误差

(b) 横摇角误差

(c) 航向角误差
图3为无姿态角在线校正时SINS工作12h引起的定位误差.由图可知,在15min位置修正期间,如果不进行航向角误差校正,后续导航解算将会耦合该项误差,定位误差将由原来的2.25nmile增加到4.52nmile.

图3 无姿态角在线校正时系统定位误差
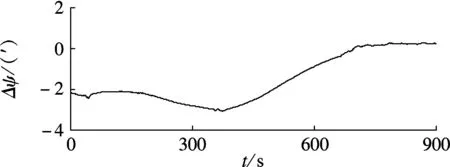
当SINS浮出水面时,利用Kalman滤波技术对姿态和航向角误差进行在线校正,航向角能够收敛到较高精度,仿真曲线如图4所示.图5给出了有无姿态和航向角在线校正情况下SINS的定位误差曲线.由于0~6h内定位误差曲线一致,此处仅给出6~12h的定位误差对比曲线.

(a) 俯仰角误差

(b) 横摇角误差
(c) 航向角误差
航向角误差主要受等效东向陀螺常值漂移误差影响,由于该项误差被调制,因此经过15min姿态角误差补偿,航向角误差由-2.2′收敛到0.19′.

图5 定位误差对比曲线
在此基础上,继续进行6h纯惯性导航,图5为6~12h内的位置误差曲线,其定位误差由4.52nmile减小为2.19nmile,由此验证了所提方法的有效性.
4转台验证实验
为了验证本文提出的单轴旋转SINS姿态和航向角在线组合校正方法在长时间导航工作中的有效性,采用三轴惯性测量转台与自行研制的光纤陀螺单轴旋转SINS搭建实验平台(见图6)进行验证实验.光纤陀螺单轴旋转SINS传感器参数见表1.分别设计了2种不同方案进行验证实验.

图6 三轴转台实验环境

传感器参数陀螺仪加速度计动态范围[-800,800](°)/s[-40g,40g]零偏稳定性≤0.01(°)/h≤1×10-4g标度因数误差≤1×10-5≤1×10-5随机游走系数0.005(°)/h5×10-5g
方案1:单轴旋转SINS接通电源后进行初始对准,初始对准结束后进入惯性导航工作模式.导航工作6h后接收GPS信号,对惯导系统位置误差进行重置,而后系统自动切换到纯惯性工作模式.
方案2:除在15min位置误差重置过程中利用速度信息对姿态和航向角误差进行在线校正外,其余步骤与方案1类似.
实验共进行12h.由于0~6h内定位误差曲线一致,故仅给出了6~12h的定位误差对比曲线(见图7).

图7 2种方案的定位误差曲线
单轴旋转SINS初始对准及二次对准姿态和航向角误差见表2.由表可知,初始对准结束后即进入纯惯性导航,6h后航向角误差为-2.6′,二次对准后航向角误差收敛到0.32′.对比2种实验方案下的惯导系统定位误差可以发现,方案1未对姿态和航向角进行校正,故后6h纯惯性定位误差为4.28nmile.方案2利用Kalman滤波技术对姿态和航向角误差进行二次对准,系统定位误差为2.06nmile,由此验证了所提方法的可行性.

表2 初始对准及二次对准姿态和航向角误差
5结语
本文对单轴旋转SINS姿态和航向角在线组合校正方法进行了研究,结合捷联惯导系统工作需求以及单轴旋转式惯导系统特点,提出了一种姿态和航向角在线组合校正方法.通过仿真实验以及三轴转台实验对所设计的组合校正方法进行了验证,对比了不同实验方案情况下惯导系统纯惯性模式下的长时间定位误差.结果表明,利用所提方法能够提高惯导系统纯惯性工作模式下的定位精度,具有较高的应用价值.
参考文献 (References)
[1]于旭东. 二频机抖激光陀螺单轴旋转惯性导航系统若干关键技术研究[D]. 长沙: 国防科学技术大学光电科学与工程学院, 2011.
[2]LahhamJI,BrazellJR.AcousticnoisereductionintheMK49ship’sinertialnavigationsystem(SINS) [C]//IEEE Position Location and Navigation Symposium.Monterey,CA,USA, 1992: 32-39.
[3]MorrowRBJ,HeckmanDW.HighprecisionIFOGinsertionintothestrategicsubmarinenavigationsystem[C]//IEEE Position Location and Navigation Symposium.PalmSprings,CA,USA, 1998: 332-338.
[4]龙兴武, 于旭东, 张鹏飞, 等. 激光陀螺单轴旋转惯性导航系统[J]. 中国惯性技术学报, 2010, 18(2): 149-153.
LongXingwu,YuXudong,ZhangPengfei,etal.Single-rotationinertialnavigationsystemwithringlasergyroscope[J]. Journal of Chinese Inertial Technology, 2010, 18(2): 149-153. (inChinese)
[5]YangY,MiaoLJ.Fiber-opticstrapdowninertialsystemwithsensingclustercontinuousrotation[J]. IEEE Transactions on Aerospace and Electronic Systems, 2004, 40(4): 1173-1178.
[6]SunW,XuAG,CheLN,etal.AccuracyimprovementofSINSbasedonIMUrotationalmotion[J]. IEEE Aerospace and Electronic Systems Magazine, 2012, 27(8): 4-10.
[7]袁保伦, 饶谷音. 光学陀螺旋转惯导系统原理探讨[J]. 国防科技大学学报, 2006, 28(6): 76-80.
YuanBaolun,RaoGuyin.Onthetheoryofopticalgyrorotatinginertialnavigationsystem[J]. Journal of National University of Defense Technology, 2006, 28(6): 76-80. (inChinese)
[8]王超, 朱海, 高大远. 单轴旋转惯导系统转轴陀螺常值漂移综合校正方法[J]. 中国惯性技术学报, 2012, 20(4): 421-424.
WangChao,ZhuHai,GaoDayuan.Comprehensivecalibrationofrotationaxisgyroconstantbiasforsingle-axialrotationofINS[J]. Journal of Chinese Inertial Technology, 2012, 20(4): 421-424. (inChinese)
[9]于旭东, 王宇, 张鹏飞, 等. 单轴旋转惯导系统中陀螺漂移的精确校准[J]. 光学精密工程, 2012, 20(6): 1201-1207.
YuXudong,WangYu,ZhangPengfei,etal.CalibrationofRLGdriftinsingle-axisrotationINS[J]. Optics and Precision Engineering, 2012, 20(6): 1201-1207. (inChinese)
[10]孙枫, 孙伟. 旋转自动补偿捷联惯导系统技术研究[J]. 系统工程与电子技术, 2010, 32(1): 122-125.
SunFeng,SunWei.Researchonauto-compensationbyrotationinstrapdowninertialnavigationsystems[J]. Systems Engineering and Electronics, 2010, 32(1): 122-125. (inChinese)
[11]孙枫, 孙伟. 旋转捷联惯导系统精对准技术[J]. 系统工程与电子技术, 2010, 32(3): 630-633, 659.
SunFeng,SunWei.Finealignmentbyrotationinstrapdowninertialnavigationsystems[J]. Systems Engineering and Electronics, 2010, 32(3): 630-633, 659. (inChinese)
[12]高伟, 奔粤阳, 李倩. 捷联惯性导航系统初始对准技术 [M]. 北京: 国防工业出版社, 2013: 91-95.
[13]白亮, 秦永元, 孙丽. 晃动基座下的双位置参数辨识精对准仿真研究[J]. 计算机仿真, 2009, 26(1): 83-86.
BaiLiang,QinYongyuan,SunLi.Astudyofdouble-positionparameteridentificationalignmentonoscillatingbase[J]. Computer Simulation, 2009, 26(1): 83-86. (inChinese)
On-lineintegratedcorrectionofattitudeandheadingforsingle-axisrotarySINS
HuJieChengXianghongZhuYixianHuangJun
(KeyLaboratoryofMicro-InertialInstrumentandAdvancedNavigationTechnologyofMinistryofEducation,SoutheastUniversity,Nanjing210096,China)
Abstract:In order to improve the positioning accuracy of the single-axis rotary strapdown inertial navigation system(SINS) in the underwater environment, a processing for on-line integrated correction of the attitude and the heading angle of the inertial navigation system is presented, and a second initial alignment method for the rotary SINS based on velocity information is also proposed. By utilizing velocity information and Kalman filtering technology, the attitude and heading errors are optimally estimated and the systematic observability is improved by periodically rotating the inertial measurement unit. The results of computer simulation and turntable verification experiments show that the positioning accuracy of the following pure inertial mode can be obviously improved by the second initial alignment. In the simulation experiment, the positioning error reduces from 4.52 to 2.19 n mile, and in the turntable experiment, the positioning error reduces from 4.28 to 2.06 n mile.
Key words:single-axis rotary; strapdown inertial navigation system(SINS); second initial alignment; error compensation
doi:10.3969/j.issn.1001-0505.2016.03.007
收稿日期:2015-12-15.
作者简介:胡杰(1987—),男,博士生; 程向红(联系人),女,博士,教授,博士生导师,xhcheng@seu.edu.cn.
基金项目:国家自然科学基金资助项目(61374215).
中图分类号:TN914
文献标志码:A
文章编号:1001-0505(2016)03-0494-05
引用本文: 胡杰,程向红,朱倚娴,等.单轴旋转捷联惯导系统姿态和航向角在线组合校正[J].东南大学学报(自然科学版),2016,46(3):494-498.DOI:10.3969/j.issn.1001-0505.2016.03.007.
