山地果园电动单轨运输机控制装置的设计
2016-06-16罗瑜清洪添胜曾镜源孙同彪李加念
罗瑜清,洪添胜,李 震,曾镜源,孙同彪,李加念
(1 华南理工大学广州学院 电气工程学院,广东 广州 510800;2 南方农业机械与装备关键技术教育部重点实验室,广东 广州 510642;3 国家柑橘产业技术体系机械研究室,广东 广州 510642;4 昆明理工大学 现代农业工程学院,云南 昆明 650500)
山地果园电动单轨运输机控制装置的设计
罗瑜清1,2,洪添胜2,3,李震2,3,曾镜源2,3,孙同彪2,3,李加念2,4
(1 华南理工大学广州学院 电气工程学院,广东 广州 510800;2 南方农业机械与装备关键技术教育部重点实验室,广东 广州 510642;3 国家柑橘产业技术体系机械研究室,广东 广州 510642;4 昆明理工大学 现代农业工程学院,云南 昆明 650500)
[摘要]【目的】 研制一种山地果园电动单轨运输机的控制装置,以提高单轨运输机的智能性和安全性,实现其自动控制。【方法】 基于单片机、直流电动机、无线通信模块等设计蓄电池驱动的山地果园单轨运输机的控制装置,通过模拟山地果园地形,分别对控制装置的行驶速度调节、制动性能及系统功耗进行测试。【结果】 电动山地果园单轨运输机的控制装置由单片机、供电单元、直流电动机、直流电动机驱动模块、制动模块、行驶速度调节模块、无线通信模块、手动控制按键及限位停车模块组成。模拟测试结果表明:单轨运输机的行驶速度可实现0.1~0.6 m/s内的加减速调节控制;单轨运输机的行驶速度随着装载质量的增加而逐渐变小;当单轨运输机在39°坡下坡行驶时,通过测速电路控制电磁式失电制动器,能有效解决单轨运输机行驶速度超出安全速度的问题。经连续1个月的实际测试,限位停车控制模块能够实现单轨运输机的及时停车,其可靠性达100%,手动按键及无线遥控均能实现单轨运输机的有效控制,无线遥控最大可靠距离为450 m,控制装置响应时间约为2 s。【结论】 所设计的控制装置运行稳定可靠,能满足单轨运输机智能性、安全性和自制性的预期设计要求。
[关键词]山地果园;单轨运输机;控制装置;速度控制
我国南方果园大多建设在地形复杂的丘陵山地上,立地条件差,果品和农资主要依靠人工方式运送,劳动强度大、工作效率低。随着山区青壮年劳动力的减少,劳动成本不断上升,进一步制约了山地果业的发展[1]。为解决山地果园果品和农资运输困难的问题,国内学者研制了山地果园链式循环货运索道和钢丝绳牵引式双轨运输机等适应山区地形特点的运输设备[1-4],在一定程度上替代了人工运输,提高了劳动生产率。
单轨运输机具有轨道轻便、架设简单、占地面积小、爬坡能力强、运输效率高等特点,特别适用于山地果园的地形条件[5-6]。日本、韩国和我国台湾等地已将单轨运输机应用于农业及林业管理[6-10]。我国已研发和试验示范了适合坡度稍缓(≤40°)的自走式单轨道果园运输机[11-14]和适合大坡度(≤60°) 的牵引式单轨道果园运输机[15-16],其中自走式单轨运输机以柴油机作动力,而牵引式单轨运输机则包括电动机和柴油机2种驱动形式。本课题组在以汽油机为动力的自走式单轨运输机的基础上,设计了一种以蓄电池为动力,由直流电机驱动的山地果园单轨运输机[17-20]。该运输机结构简单,但作业时仍需人工辅助操作,在复杂地形条件下操作人员难以有效地观察和控制运输机,不能很好地满足山地果园运输作业的要求。为此,本研究在前期研究的基础上,研制了运输机的控制装置,以期进一步提高运输机对山地果园立地条件的适应性,提高运输机的安全性和自动化水平,进而更好地满足山地果园运输作业的要求。
1总体方案设计
控制装置的设计要求为:①用户可设定单轨运输机的行驶速度,且控制系统能够自动调节运输机的行驶速度;②运输机行驶到轨道末端时能够自动停车以避免脱轨;③控制装置可实现手动控制和无线遥控2种控制模式。
如图1所示,本研究设计的控制装置主要包括无刷直流电动机及其驱动模块、48 V电源、制动模块、速度调节模块、单片机、无线通信模块、5 V电源、手动控制按键和限位停车模块等。单片机接收来自无线通信模块或手动控制按键的控制信息;驱动模块用于驱动单轨运输机行驶;速度调节模块用于实现单轨运输机的加减速控制;制动模块用于完成运输机的电磁式失电制动;限位停车模块用于实现单轨运输机运行到轨道末端时自动停车的功能。

图 1 单轨运输机控制装置原理框图
2控制装置的设计
2.1驱动控制
驱动控制部分主要包括:无刷直流电动机、直流电动机驱动器、电动机转向控制电路、电动机转速控制电路、蜗轮蜗杆、48 V电源,其原理如图2所示。控制装置通过直流电动机驱动模块控制直流电动机转动,带动蜗轮蜗杆减速机(减速比为1∶5)转动为单轨运输机提供动力,经传动装置和驱动装置传递至驱动轮,驱动运输机行驶。通过电动机转向/转速控制器控制直流电动机驱动器,调节电动机的转向和转速,以控制运输机的行驶方向和行驶速度。直流电动机选用额定电压为48 V,额定功率为500 W,内置霍尔传感器的三相永磁无刷直流电动机,由4个12 V、28 Ah的铅酸蓄电池串联组成的48 V电源为其供电[21]。

图 2 单轨运输机驱动模块框图
2.2电动机转速控制器
电动机转速控制器由数控电位器(AD5241,
ADI,美国)构成,电路如图3所示。电位器的电压输出端(W1)与直流电动机驱动器的调速端相连,单片机通过I2C总线控制AD5241的W1和B1端口间的电压差值,直流电动机驱动器可根据该电压差值调节直流电动机的转速。
为防止运输机下坡行驶时的行驶速度超出安全范围,研究中设计了下行超速保护模块。如图4所示,该模块采用LM324集成运算放大器实时采集无刷直流电动机内置霍尔传感器输出的方波信号,经RC滤波电路滤波后输入到单片机的定时/计数器接口进行计数,根据固定时间间隔内的计数值,计算电动机转速,其表达式为:
R=N/T。
(1)
式中:R为直流电动机的转速,单位为r/s;N为固定时间间隔内的计数值;T为时间间隔,本研究中T=500 ms。

图 3 单轨运输机电动机转速控制器电路图
2.3制动控制模块
运输机行驶在较大坡度的山地果园时,除受电动机所给动力外,还受重力在坡面方向上的分力作用[19-20],当单轨运输机下坡时,重力在坡面方向上的分力会使其加速运行。为避免运输机下坡行驶速度超出安全范围,笔者设计了制动控制模块。如图5所示,制动控制模块中的制动器选用额定电压为48 V、额定功率为48 W的电磁式失电制动器,安装于电动机转轴上。单片机根据测速模块反馈的电动机转速判定并控制制动模块的工作状态,控制框图见图6。当电动机转速超过预定转速时,单片机通过控制继电器,使电磁式失电制动器断电,电磁式失电制动器通过与电动机摩擦使电动机减速;当测速信号采集电路检测到电动机转速未超过安全阈值时,单片机通过控制继电器使电磁式失电制动器通电,此时电动机不受摩擦阻力作用,电动机转速不变。

图 5 单轨运输机电机制动控制模块框图
2.4限位停车模块
为防止运输机行驶到轨道始末两端时脱轨,设计了限位停车模块,使运输机行驶到轨道末端时自动停车。限位停车模块由行程开关及限位档杆组成,行程开关安装于单轨运输机的下方,限位档杆安装于运输机行驶的轨道始末两端。在行驶过程中,当限位开关与限位档杆接触时,限位开关闭合,单片机接收到限位开关的闭合信号后发出停车命令,直流电动机驱动模块控制无刷直流电动机停止,制动控制模块控制电磁式失电制动器断电制动,从而实现运输机的制动。
2.5遥控及手动控制模块
遥控或手动控制模块可在无线遥控和手动控制2种模式下工作。用户可通过遥控器上的前进、后退、加速、减速或停止按键来控制单轨运输机的工作状态,无线通信模块选用PT2262无线发射模块和PT2272无线接收模块。PT2262/PT2272模块均工作在315 MHz频段,为增强接收信号强度,研究中将天线延伸到车载控制箱外。通过配置地址编码引脚使2个模块具有相同的地址码,釆用按键组合电路实现数据编码的惟一性,具体组合如表1所示。

表 1 PT2262数据码组合表
表1中,当其中一个引脚输入为高电平“1”时,PT2262发出信号,PT2272接收到信号后,其对应数据引脚输出高电平。由表1可知,本研究中前进控制命令对应于PT2262芯片的D0引脚为高电平,此时该芯片对应的数据输入引脚的二进制码为0x01H。后退、加速、减速、停止命令相应数据输入引脚的二进制码分别为0x02、0x04、0x08和0x10。
手动控制按键安装于车载控制箱上,设置有3个分别与单片机连接并分别用于控制运输机前进、后退和停止的按键,用于在遥控失灵或紧急情况下使用。
3软件设计
系统软件采用模块化编程设计,主要模块包括行驶速度调节模块、直流电动机驱动模块、制动模块、无线通信模块、限位停车模块、延时函数模块,程序执行流程如图7所示。

图 7 单轨运输机控制系统程序执行流程图
4试验与结果分析
4.1试验变量的选择
单轨运输机控制装置的稳定性及其系统功耗直接影响着运输机的运载性能和工作效率。为分析控制装置的稳定性及运输机的系统功耗,本研究对运输机的行驶速度、制动性能及系统功耗进行了试验。在实际应用中,运输机的行驶速度及系统功耗受直流电机转速、爬坡角度、制动状态及装载质量等因素的影响,其中直流电机的转速主要受数控电位器输出电压控制。试验设制动和不制动2种制动状态,装载质量设0,60,110,150 kg共4个水平,爬坡角度设0~39°,数控电位器输出电压为0~5 V。
4.2试验场地及设备
试验场地位于华南农业大学工程学院国家柑橘产业技术体系机械研究室试验场,地形起伏坡度为±(5±0.5)°,近似视为平地。为模拟山地果园地形,试验场内通过架设轨道支撑架构成了一条单轨运输机轨道。该轨道全长(48±0.5) m,最大坡度为39°,其中平地轨道长度为(40±0.5) m,坡度为0°~39°渐增段轨道长度为(3±0.5) m,坡度为39°的轨道长度为(5±0.5) m。
单轨运输机车体包括货运架、单轨运输机头及控制装置,总质量为100 kg。本试验使用10个单箱质量为(15±0.5) kg的水箱作为单轨运输机运输负载。试验中通过改变水箱数量、制动状态、爬坡角度和数控电位器取值,测试各试验变量分别对单轨运输机的行驶速度及系统功耗的影响。选取相同的轨道段作为单轨运输机的行驶起点和终点,分别在不同负载、不同速度下使单轨运输机行驶在平地和模拟坡地的轨道上进行试验。通过测量单轨车行驶的轨道段距离,采用秒表对单轨运输机的行驶时间计时,换算成单轨运输机的行驶速度;通过数字万用表(美国吉时利公司生产,型号为Keithly 2700)测量串联在48 V蓄电池输出端的电流感应传感器(型号为ACS712ELC-20A)的输出电压,换算成电流,计算系统的功耗。
4.3测试结果与数据分析
4.3.1行驶速度测试运输机的行驶速度由数控电位器控制直流电动机控制器,进而对电动机的转速进行调节。分别在运输机前进和后退时,改变数控电位器的输出,测试运输机在平地行驶时的速度变化情况。试验中,数控电位器的输出电压为0~5 V,以0.3 V为步进;记录运输机在平地行驶固定距离所需的时间,计算其行驶速度;数控电位器每个输出电压条件下进行3次试验,取其均值作为测试结果。不同载质量条件下,数据电位器输出电压与单轨运输机平地运行速度的关系曲线如图8所示,其线性回归方程见表2。

图 8 不同数控电位器输出电压及不同装载质量情况下单轨运输机的平地行驶速度

装载质量/kgLoad回归模型Regressionmodel前进Forward后退BackwardR2前进Forward后退Backward0y=0.216x-0.188y=0.209x-0.1600.9790.97360y=0.208x-0.195y=0.208x-0.1780.9810.976110y=0.208x-0.202y=0.208x-0.1960.9850.980150y=0.205x-0.209y=0.204x-0.1980.9820.977
由表2可知,数控电位器输出电压与单轨运输机的平地行驶速度具有较好的线性相关性(R2>0.973)。综合表2运输机在不同负载条件下前进和后退时的行驶速度及其对应的数控电位器输出电压,得到运输机在平地行驶时的速度计算公式为:
y=0.21x+0.19。
(2)
式中:y为单轨运输机平地运行速度, m/s;x为数控电位器输出电压,V。
4.3.2制动控制试验单轨运输机空载慢速行驶在39°~0°坡度渐小的下坡时,测量运输机在制动刹车和不制动刹车2种情况下的电流,结果如图9所示。由图9可知,制动器不工作时,运输机在重力作用下带动直流电动机转动,蓄电池消耗电流迅速降低,直流电动机处于发电机状态,产生反向电流,无线遥控及手动控制失效,运输机的运行速度约为 0.87 m/s;运输机行驶到平地后自身重力在水平方向的分力消失,但直流电动机仍处于发电机状态,直到消耗完下坡时存储的能量后电动机停止转动;整个过程中系统输出电流由11.97 A下降到-4.64 A后又逐步上升到0.31 A。制动器工作时,由制动器产生的摩擦力抵消了运输机重力在坡面上的分力,系统输出电流由11.89 A逐步下降到0.67 A后又逐步上升到0.95 A。无线遥控及手动控制能够有效控制运输机的行驶速度约为0.25 m/s。

图 9 单轨运输车下坡(坡度39°~0°)时不同制动方式
4.3.3功耗测试试验采用电流感应传感器(型号为ACS712ELC-20A)测量蓄电池的输出电流。为提高试验结果的准确性,笔者首先对电流感应传感器进行了标定试验。选用数字可调电源(MATRIX公司生产,MPS-3003L-3)模拟蓄电池的电压,将功率电阻和电流感应传感器串联在电源两端,改变功率电阻的阻值,从而改变电流感应传感器流过的电流,通过示波器(Tektronix公司生产,型号为TDS3052B)采集电流感应传感器的输出电压及功率电阻两端的电压并换算成电流。标定结果如图10所示,拟合直线的R2=0.999,电流感应传感器的标定公式如下:
Io=10×(Uo-2.523)。
(3)
式中:Io为蓄电池输出电流,A;Uo为电流感应传感器输出电压,V。

图 10电流感应传感器标定结果
Fig.10Calibration result of current sensor
单轨运输机的行驶过程是电能转换为机械能的过程,通过改变单轨运输机的装载质量、速度及行驶坡度测量系统的功耗情况,用通过数字万用表(美国吉时利公司生产,型号为Keithly 2700)测量串联在48 V蓄电池输出端的电流感应传感器(型号为ACS712ELC-20A)的输出电压,用式(3)换算成电流。为方便试验,设定数控电位器输出电压为2.2 V时的速度(空载平地速度约为0.2 m/s)为慢速,数控电位器输出电压为4.0 V时的速度(空载平地速度约为0.6 m/s)为快速;单轨运输机的行驶轨迹:平地(地面有5°左右的坡度起伏)、0°~39°(坡度从0°渐增到39°)上坡、39°上坡。0°~39°上坡时不同载质量和不同速度空载情况下单轨运输机系统的消耗电流分别如图11和图12所示。由图11、12可知,爬行的坡度越陡,系统的消耗电流越大;在相同装载质量情况下,单轨车行驶速度越快,系统消耗电流越大;在相同速度情况下,单轨运输机装载质量越大,系统消耗电流越大。
对试验数据进行分析可知,①当单轨运输机慢速运行在平地时,空载情况下,系统消耗电流均值约为1.77 A;装载质量为70 kg情况下,系统消耗电流均值约为2.18 A;装载质量为150 kg情况下,系统消耗电流均值约为2.60 A。当单轨运输机慢速运行在39°上坡时,系统消耗电流为13.31~16.52 A,爬坡速度约为0.24 m/s。②单轨运输机快速运行在平地时,空载情况下,系统消耗电流均值约为2.83 A;装载质量为70 kg情况下,系统消耗电流均值约为3.23 A;装载质量为150 kg情况下,系统消耗电流均值约为3.56 A。③单轨运输机快速运行在39°上坡时,系统消耗电流为13.21~20.01 A,系统最大消耗电流约为系统额定电流的1.54倍(系统额定电流包括:电动机额定电流12.5 A,控制装置额定工作电流0.52 A),爬坡速度约为0.27 m/s,与平地运行速度相比明显减慢。

图 110°~39°上坡不同载质量情况下单轨运输机系统的消耗电流
Fig.11Current consumption of system when monorail vehicles climb up (slope 0°-39°) under different loads
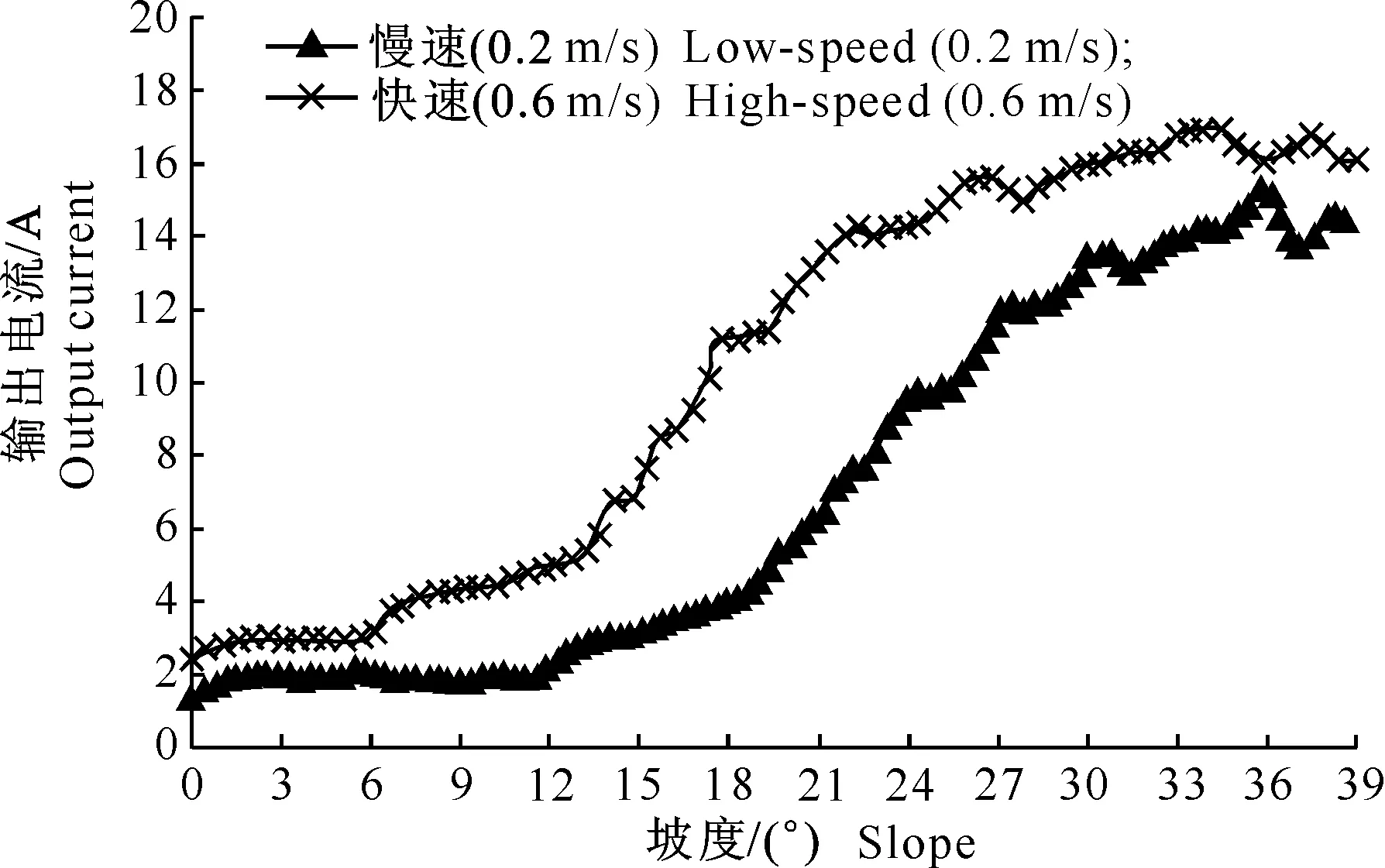
图 12 0°~39°上坡不同速度空载情况下
4.4实际应用测试
经过连续1个月的实际应用测试,单轨运输机运行到轨道始末两端时,当限位开关触碰到限位档杆时,单轨运输机能够立即停止运行,测试的成功率为100%。无线遥控的最大可靠通信距离为450 m。当单轨运输机装载质量为150 kg时,电压为48 V、容量为28 Ah的蓄电池充满电后,能够带动单轨运输机在试验场内模拟轨道上来回运行200趟左右,可持续行驶4 h。控制装置响应时间约为2 s。
5结论
1)本研究设计的山地果园单轨运输机控制装置,实现了单轨运输机在无线遥控和手动控制2种模式下的启停、加减速等控制;通过行驶速度调节模块实现单轨运输机的速度调节;通过下行速度保护模块及制动控制模块,实现了单轨运输机超过安全速度后的自动减速功能。
2)模拟测试表明:在相同装载质量、相同输出电压下,单轨运输机在前进和后退时的行驶速度基本相同,其运行速度可实现0.1~0.6 m/s的加减速调节控制;单轨运输机的行驶速度随着装载质量的增加而逐渐变小,但其装载质量的大小对行驶速度的影响不显著;当单轨运输机在39°的坡度下坡行驶时,通过测速电路控制电磁式失电制动器,能有效解决单轨运输机超出安全速度的问题,使其行驶速度调节为0.25 m/s。单轨运输机爬行的坡度越陡、行驶速度越快、装载质量越大,系统的消耗电流越大,且随着坡度的增加,行驶速度及装载质量对系统消耗电流影响变大;单轨运输机额定装载质量可达150 kg。
3)经连续1个月的实际测试,限位停车控制模块能够实现单轨运输机的及时停车,其可靠性达100%,手动按键及无线遥控均能实现对单轨运输机的有效控制,无线通信最大可靠距离为450 m。控制装置响应时间约为2 s。结果表明,该控制装置运行稳定可靠,满足了预期设计要求。
[参考文献]
[1]洪添胜,杨洲,宋淑然,等.柑橘生产机械化研究 [J].农业机械学报,2010,41(12):105-109.
Hong T S,Yang Z,Song S R,et al.Mechanization of citrus production [J].Transactions of the Chinese Society for Agricultural Machinery,2010,41(12):105-109.(in Chinese)
[2]李善军,邢军军,张衍林,等.7YGS-45型自走式双轨道山地果园运输机 [J].农业机械学报,2011,42(8):85-88.
Li S J,Xing J J,Zhang Y L,et al.7YGS-45 type self-propelled dual-track mountain orchard transport [J].Transactions of the Chinese Society for Agricultural Machinery,2011,42(8):85-88.(in Chinese)
[3]洪添胜,苏建,朱余清,等.山地果园链式循环货运索道设计 [J].农业机械学报,2011,42(6):108-111.
Hong T S,Su J,Zhu Y Q,et al.Circular chain ropeway for cargo transportation in mountain citrus orchard [J].Transactions of the Chinese Society for Agricultural Machinery,2011,42(6):108-111.(in Chinese)
[4]文韬,洪添胜,朱余清,等.山地果园索道张紧调节自动控制装置的设计 [J].农业工程学报,2011,27(6):128-131.
Wen T,Hong T S,Zhu Y Q,et al.Design of automatic control device for ropeway tension adjustment in hilly orchard [J].Transactions of the Chinese Society for Agricultural Machinery,2011,27(6):128-131.(in Chinese)
[5]刘滨凡,王立海.森林生态型单轨运输机轨道啮合机构设计 [J].林业机械与木工设备,2008,36(4):38-39.
Liu B F,Wang L H.Design of the engaging mechanism of rails for forest ecosystem-friendly monorail cars [J].Forestry Machinery & Woodworking Equipment,2008,36(4):38-39.(in Chinese)
[6]刘滨凡, 王立海.单轨运输机的发展及在我国林业中的应用 [J].森林工程,2008, 24(1):25-27.
Liu B F,Wang L H.Development of monorail and it’s application in forestry in China [J].Forest Engineering,2008,24(1):25-27.(in Chinese)
[7]战廷文,张学峰,刘长乐,等.单轨运输机应用现状 [J].林业机械与木工设备,2008,36(12):45-47.
Zhan T W,Zhang X F,Liu C L,et al.Application status of monorail vehicles [J].Forestry Machinery & Woodworking Equipment,2008,36(12):45-47.(in Chinese)
[8]Lee C H,Kim C W,Kawatani M,et al.Dynamic response analysis of monorail bridges under moving trains and riding comfort of trains [J].Earthquake Engineering and Structural Dynamics,2005,35(10):1225-1245.
[9]Yamamoto S,Kanamitsu M,Ajiki K,et al.S-shaped multipurpose monorail for hillside orchards [J].Japan Agricultural Research Quarterly,2007,41(2):147-152.
[10]刘滨凡.森林生态型单轨运输设备安全稳定研究 [D].哈尔滨:东北林业大学,2009.
Liu B F.The safe and stable research of forest ecotype's transporting of monorail vehicle [D].Harbin:Northeast Forestry University,2009.(in Chinese)
[11]张衍林,樊啟洲,邓在京,等.一种山地单轨道果园运输机:中国,200910061170.X [P].2009-09-30.
Zhang Y L,Fan Q Z,Deng Z J,et al.An monorail transporter of mountain orchard:China,200910061170.X [P].2009-09-30.(in Chinese)
[12]张俊峰,张衍林,张唐娟,等.自走式山地单轨运输机遥控系统的设计 [J].华中农业大学学报,2012,31(6):729-796.
Zhang J F,Zhang Y L,Zhang T J,et al.Design of remote control system for self-propelled mountainous monorail transporter [J].Journal of Huazhong Agricultural University,2012,31(6):729-796.(in Chinese)
[13]张衍林,孟亮,赵亮,等.一种无人驾驶单轨道运输机:中国,201320498971.4 [P].2013-08-15.
Zhang Y L,Meng L,Zhao L,et al.An unpiloted monorail transporter:China,201320498971.4 [P].2013-08-15.(in Chinese)
[14]张俊峰,李敬亚,张衍林,等.山地果园遥控单轨运输机设计 [J].农业机械学报,2012,43(2):91-95.
Zhang J F,Li J Y,Zhang Y L,et al.Design of remote control monorail transporter for mountainous orchard [J].Transactions of the Chinese Society for Agricultural Machinery,2012,43(2):91-95.(in Chinese)
[15]张俊峰,张唐娟,张衍林.山地橘园遥控牵引式无轨运输机的设计 [J].湖北农业科学,2012,51(10):2111-2113.
Zhang J F,Zhang T J,Zhang Y L.Design of the remote control traction transporter for mountainous orangery [J].Hubei Agricultural Sciences,2012,51(10):2111-2113.(in Chinese)
[16]张衍林,樊啟洲,李善军,等.一种牵引式单轨道果园运输机:中国,201010605421.9 [P].2011-06-29.
Zhang Y L,Fan Q Z,Li S J,et al.An traction monorail transporter for mountainous orchard:China,201010605421.9 [P].2011-06-29.(in Chinese)
[17]孙同彪.山地果园电驱动单轨运输机的研制与试验 [D].广州:华南农业大学,2012.
Sun T B.Study and experiments of an electric drive monorail vehicle for mountain orchards [D].Guangzhou:South China Agricultural University,2012.(in Chinese)
[18]孙同彪,洪添胜,陈银清,等.山地果园单轨运输机的应用及性能分析 [C]//陈建,祝诗平,彭桂兰,等.中国农业工程学会2011年学术年会论文集.重庆:西南大学出版社,2011:85-86.
Sun T B,Hong T S,Chen Y Q,et al.Application and performance analysis of monorail vehicles for mountain orchards [C]//Chen J,Zhu S P,Peng G L,et al. 2011 Conference Proceedings of CSAE.Chongqing:Southwest University Press,2011:85-86.(in Chinese)
[19]陈银清,洪添胜,孙同彪.山地果园单轨货运机的最小转弯半径及最大承载量分析 [J].农业工程学报,2012,28(S1):50-56.
Chen Y Q,Hong T S,Sun T B.Analysis on minimum turning radius and maximum carrying capacity on monorail vehicles for mountain orchard [J].Transactions of the Chinese Society of Agricultural Engineering,2012,28(S1):50-56.(in Chinese)
[20]洪添胜,陈银清,孙同彪,等.一种电动式山地果园单轨道运输机:中国,ZL201110401647 [P].2012-06-13.
Hong T S,Chen Y Q,Sun T B,et al.An electric drive monorail vehicle of mountain orchard:China,ZL201110401647 [P].2012-06-13.(in Chinese)
[21]李广志.电动车用三相无刷直流电动机控制系统 [D].辽宁大连:大连理工大学,2010.
Li G Z.Three-phase brushless DC motor control system for electric vehicle [D].Dalian,Liaoning:Dalian University of Technology,2010.(in Chinese)
Development of control device for an electric drive monorail vehicle in mountain orchard
LUO Yu-qing1,2,HONG Tian-sheng2,3,LI Zhen2,3,ZENG Jing-yuan2,3,SUN Tong-biao2,3,LI Jia-nian2,4
(1CollegeofElectricalEngineering,GuangzhouCollegeofSouthChinaUniversityofTechnology,Guangzhou,Guangdong510800,China;2KeyLaboratoryofKeyTechnologyforSouthAgriculturalMachineryandEquipment,MinistryofEducation,Guangzhou,Guangdong510642,China;3DivisionofCitrusMachinery,ChinaAgricultureResearchSystem,Guangzhou,Guangdong510642,China;4CollegeofModernAgriculturalEngineering,KunmingUniversityofScienceandTechnology,Kunming,Yunnan650500,China)
Abstract:【Objective】 In this paper,an automatic control device of electric drive monorail vehicle for mountain orchards was designed to increase the intelligent and safe level.【Method】 The control device for battery-driven monorail vehicle of mountain orchard was designed based on micro controller,DC motor,wireless communication module and so on.The whole system was tested within a monorail which simulated the landscape of actual citrus orchards.Experiments of speed controlling,reliability of the brake controlling and power consumption were carried out,respectively.【Result】 The control device included micro controller,power supplying circuit,DC motor and its driving module,brake control module,speed control module,wireless communication module,manual control panel and distance-limited parking module.Traveling velocity of monorail vehicles can be adjusted within the range of 0.1-0.6 m/s.The speed of monorail vehicle going downhill (slope of 39°) was controlled by its automatic braking control module.Further test was conducted in actual application for one consecutive month,and the results showed that the monorail vehicle can be stopped by this braking module, proving that the reliability was up to 100%.The longest communication reached 450 m with a response time of 2 s.【Conclusion】 The designed control device met the demand of mountain citrus application.
Key words:mountain orchard;monorail vehicle;control device;speed control
DOI:网络出版时间:2016-02-0209:3710.13207/j.cnki.jnwafu.2016.03.031
[收稿日期]2014-07-01
[基金项目]广东省高等学校优秀青年教师培养计划项目(YQ2013028);国家现代农业产业技术体系建设专项(CARS-27);国家公益性行业(农业) 科研专项(200903023)
[作者简介]罗瑜清(1986-),女,四川广元人,助教,硕士,主要从事机械电子系统控制及自动化研究。E-mail:luoyuqing6@163.com[通信作者]洪添胜(1955-),男,广东梅县人,教授,博士,博士生导师,主要从事农业工程、机电一体化和信息技术应用研究。E-mail:tshong@scau.edu.cn
[中图分类号]S24;S233.74
[文献标志码]A
[文章编号]1671-9387(2016)03-0227-08
