基于Inpho软件空三数据处理及其精度分析
2016-06-15陆康
陆康
DOI:10.16661/j.cnki.1672-3791.2015.36.024
摘 要:本文对传统摄影测量到新数字时代下技术更新换代对比总结,通过基于新型传感器下的空三加密研究及其精度分析,讨论了POS数据辅助下Inpho软件的空三加密基本流程,并展开多组生产数据对比试验,发现 POS数据辅助下新摄影测量系统下,在减少了外控点数量的同时,误差变化平稳,仍能保持很高的精度,说明均匀布设外业控制点适用于传统模式的相机拍摄同样也适用于新型数码相机的拍摄,加入POS数据辅助空中三角测量,可以有效地减少地面控制点的数量,从而缩短生产时间,提高生产效率。
关键词:摄影测量 空中三角测量 POS 误差
中图分类号:P231.5 文献标识码:A 文章编号:1672-3791(2015)12(c)-0024-02
随着测绘技术和计算机技术的不断发展,摄影测量已由解析摄影测量发展到全数字摄影测量阶段。传统的航空摄影测量主要以胶卷式影像应用为主,以其周期短,成本低,精度高等优点成为地形图成图的重要手段之一。近些年,在工程生产中引进了机载激光雷达等技术,进而可克服航摄中天气的影响,结合GPS/IMU系统下高精度POS数据,减少了中间环节,保证精度的同时还可以同步得到正射影像等多种相关地图数据产品,目前不仅在地形测图,在城市规划、电力系统、国土资源整治、林业管理、环境保护等领域也得到越来越广泛的应用。
1 全自动空中三角测量
数字摄影测量生产作业中,空中三角测量(简称空三加密)是关键工序之一,影响着是航测产品质量与工作效率。空三加密是确定整个测区的定位和定姿,从而获得测区内任意点的绝对坐标,依据提供的定向控制点和像片定向参数,确定区域内所有影像的外方位元素,从而求出该点所对应的物方空间三维坐标。如果将影像点坐标观测值与地面控制点坐标一道进行区域网平差,这便是经典的解析空中三角测量方法;如果将该观测值与GPS/POS数据(必要时可加入少量的地面控制点)一并进行区域网联合平差,即形成了GPS/POS辅助空中三角测量。
自动空中三角测量作业过程,对于模型连接点,利用多像影像匹配算法可高效、准确、自动地量测其影像坐标,完全取代了常规航空摄影测量中由人工逐点量测像点坐标的作业模式。对于区域网中的地面控制点,目前还缺乏行之有效的算法来自动定位其影像,只能将数字摄影测量工作站当作光机坐标量测仪由作业员手工量测。从摄影测量软件角度讲,当前的自动空中三角测量,已是高效率、自动化程度很高的工序之一,如果能利用上GPS/POS数据,进行GPS/POS辅助空中三角测量,则其效率可望进一步提高,在有些情况下,即可实现全自动化空中三角测量。对GPS/POS辅助空中三角测量而言,若要进行高精度点位测定,至少在区域网的四角需要量测4个地面控制点;如果是进行高山区中小比例尺的航空摄影测量测图,则可考虑采用无地面控制的空中三角测量方法,此时可完全用GPS/POS摄站坐标取代地面控制点,实现真正意义上的全自动空中三角测量。
2 POS定义
所谓机载定位定向系统POS(Position and Orientation System)是基于全球定位系统(GPS)和惯性测量装置(IMU)的直接测定影像外方位元素的现代航空摄影导航系统,可用于在无地面控制或仅有少量地面控制点情况下的航空遥感对地定位和影像获取。该技术的引进,使得生产工艺中数据获取和处理也随之发生改变。而工程生产中空三软件效率的高低直接影响着项目进度。
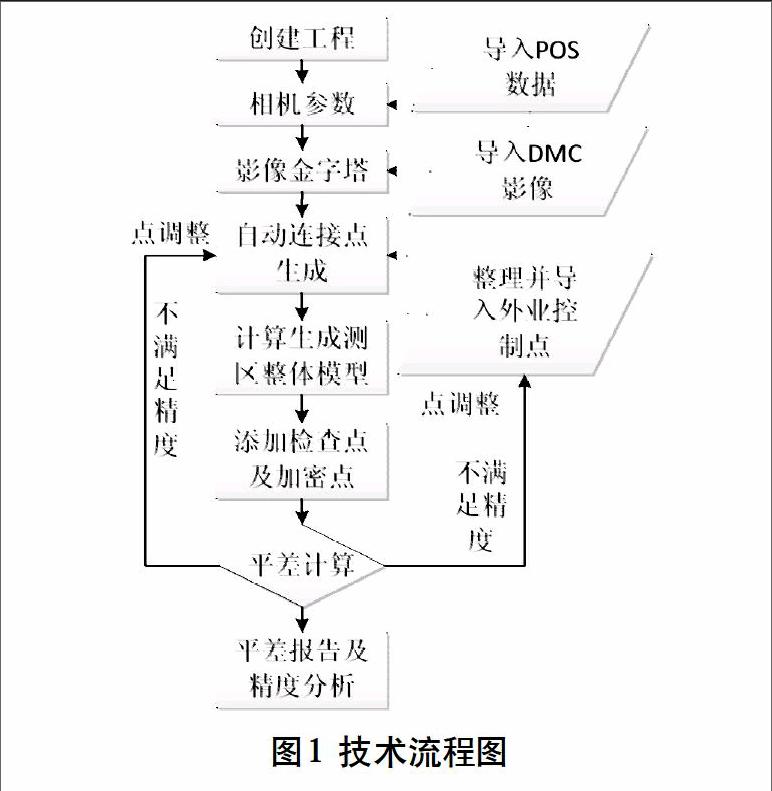
3 POS数据辅助下的空三处理
技术流程如图1所示。
更新换代之际,该单位生产也处于过渡,在实际工作中常常会出现传统的胶卷式影像和数码影像同时作业的情况。那么引入POS数据,与传统工艺相比,空三加密流程工艺以及精度都会有哪些变化和影像呢,这里大家可对Inpho软件和传统HELAVA数字摄影测量工作站做数据处理实验,比较专门处理数码影像的空三加密软件和传统的空三加密软件处理数码影像之间是否通用性,探讨下其对空三加密精度的影响,以及Inpho软件的在新工艺下的优缺点。
4 数据实验及其精度分析
该次试验选用工程中某段外控点比较密集的地区,位于东经117°15′~119°20′,北纬34°10′~34°50′,地势平坦。采用2000国家大地坐标系为平面坐标系,1985国家高程基准为高程系统。所收集测区成果资料,平面点为国家四等(GPS点为C级)及以上点,高程点为国家四等及以上水准点。航摄资料为收集的DMC2001数码相机拍摄的像片,焦距f=120 mm的镜头,摄影比例尺约1∶20 000左右,航向南北飞行,航向重叠为60%~65%,像元尺寸为12 μm,影像尺寸为14 000×8 000像素,地面分辨率GSD为0.24 m,像幅大小为96mm×168 mm。
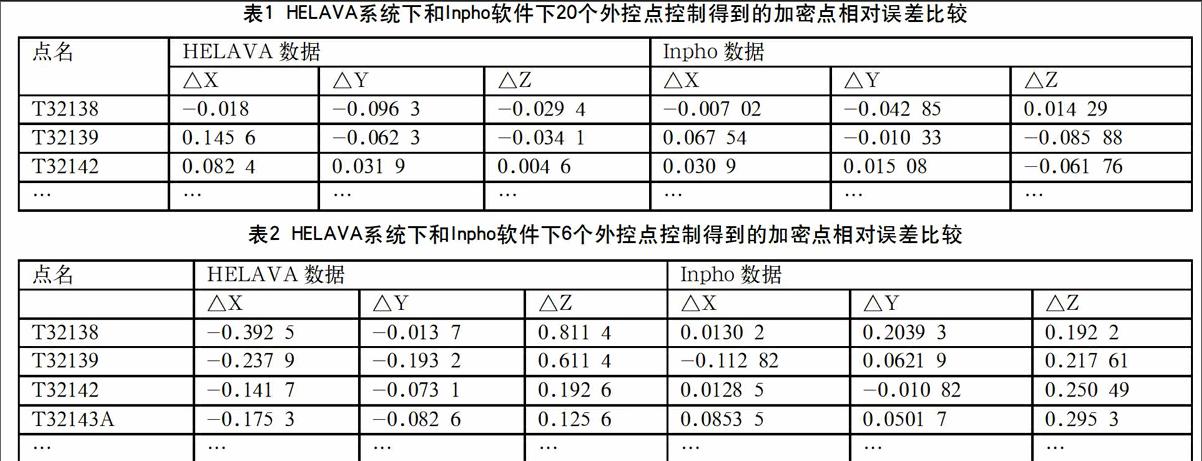
传统的生产模式下要求外控点足够多且分布均匀,如图所示。该实验区内可获得均匀分布的20个外控点。可在两个软件下,考察20个外控点全控制下,以及均匀抽取仅边界6个控制点控制下(其他控制点作为检查点)得到的检查点和加密点精度变化。实验结果分析表如表1。
从表1可以看出,20个外控点全控制下,HELAVA和Inpho两个系统处理得到的加密点的平面、高程的相对误差都在0.26以内,对于制作1∶2 000地形图而言精度都已足够。也即说明在外控点足够多情况下,各软件系统处理数据都比较稳定的,精度可靠。当控制点相对较少时,参考表2,HELAVA系统误差值较前面控制点比价多的情况下变化比较大,而导入POS数据的Inpho系统下误差变化较平稳,仍能保持很高的精度。
同时,对该实验区控制点数据,尤其是区域边界控制点数据做平、高的选择实验,发现,平、高点的控制精度高于全控制点的精度,也即说明,多增加外业控制点并不能提高整个区域的加密精度。
5 结语
很明显,随着外业控制点的减少,Inpho系统的稳定性明显强于HELAVA系统。这些结果也说明,外业控制点的分布对两个系统的影响是相同的,均匀布设外业控制点适用于传统模式的相机拍摄同样也适用于新型数码相机的拍摄,加入POS数据辅助空中三角测量,可以有效地减少地面控制点的数量。同时在实际工作中,应该让有限的外业控制点尽可能均匀分布于整个测区,这样有助于提高测区成果精度。
参考文献
[1] 张祖勋,张剑清.数字摄影测量学[M].武汉:武汉大学出版社, 1997.
[2] 刘江瑜.基于新型传感器的空三加密研究及精度分析[D].武汉:武汉大学,2012.
[3] 查燕萍,张华平.数字摄影测量发展现状与趋势初探[J].江西测绘,2009(4):4-6.
