单天线无源测向技术研究与应用
2016-06-12张硕,付强
张 硕,付 强
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
单天线无源测向技术研究与应用
张 硕,付 强
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
测向技术是指微波侦测天线接收目标发射的信号或者目标反射的信号,判断目标的位置的技术。为了提高测向精度,采用最小二乘法进行数据处理。
测向技术;最小二乘法;数据处理
0 引言
侦察测向技术分为“有源测向”和“无源测向”。有源测向需要主动发送电测波,通过接受反射回来的信号判断目标的位置。无源测向只通过接收目标发射的信号或者目标反射的其他发射源的信号,即可判断目标位置。本文研究的是工程中实用的无源测向技术。
1 方案设计
1.1 技术背景
天线接收目标发射的信号或者目标反射的其他发射源的信号(1.5GHz~18GHz范围内),经接收机处理后,将信号电平实时发送到CAN总线上,方位码盘将天线座架的方位轴角实时发送到CAN总线上。单天线测向时,天线方位轴快速旋转一周,伺服控制器快速采集方位地理角和信号电平。方位地理角由方位码盘实时发送的方位轴角(单位:°)经过坐标转换得出,信号电平由接收机实时解算并发送(单位:dB)。基本测向方法是伺服控制器采用简单的排序方法处理采集的数据,得出信号电平最大时的方位地理角,即为测向目标方位角。
系统原理框图如图1所示。

图1 系统框图
1.2 技术难点
传统测向方法存在以下不足:
a) 接收机场强由于受到干扰,存在噪声和野值,影响信号电平峰值的判断;
b) 在低频段天线方向图角度很宽,峰值处的梯度很小,影响最大峰值的判断;

图2 新测向技术流程图
c) 在高频天线方向图角度很窄,导致接收机只能采集2个点,无法判断最大值的精确位置。
1.3 新测向技术的原理
首先对方位地理角和信号电平数据进行采集、存储;然后采用角度扩展方法确定数据采集范围、半波束平移方法确定测向目标方位角所在的采用区间、冒泡法确定测向目标方位角的近似值;最后通过数据曲线拟合、求导得出测向目标方位角。具体流程见图2所示。
其具体步骤如下:
a) 数据发送
天线测向时,伺服控制器通过CAN总线实时采集天线方位轴快速旋转380°范围内的采样点,并且每间隔5ms存储一次采样点的信息,其中,存储的采样点的信息包括采样点的序号、方位地理角以及信号电平三个参数,其中,方位轴角经坐标变换得到方位地理角。
接收机根据当前的测向频率实时调整信号电平发送的速率,当测向速率大于12GHz时,信号电平的速率为800Hz;当测向频率小于12GHz时,信号电平的速率为400Hz。用这种方法的优点是:在低频时由于波束宽度内采样点较多,适当的降低更新速率,优先保证数据的准确性;在高频时由于波束宽度内的采样点较少,适当的提高更新速率,优先保证数据的实时性。
b) 数据采集
提出角度扩展方法,即采集天线方位轴旋转380°范围内的采样点,共计422个采样点。
由于测向频率范围是1.0GHz~18.0GHz,所以波束宽度范围是2.0°~35.0°。测向数据采集角度扩展了20°(最大半波束宽度),使得无论测向起点在哪个角度,都可以保证有一幅完整的扫描图形,便于数据分析和处理。
c) 确定采样点区间
根据测向频率的波束宽度确定采样点个数N,将N个连续采样点组成的区间定义为采样点区间,前N个采样点组成第一个采样点区间,每次后移N/2个采样点再确定下一个采样点区间,以此类推。
d) 确定测向目标方位角所在的采样点区间
对所有采样点区间内的信号电平求平均值,得出信号电平平均值最大的采样点区间,测向目标方位角就在该采样点区间内。
此方法既克服了噪声对数据的影响,又不丢失必要的数据。用此方法得到的平均值准确性好、稳定性高。
e) 确定测向目标方位角的近似值
在上述信号电平平均值最大的采样点区间,利用冒泡法得出信号电平最大的采样点,该采样点的方位地理角为Amax,即为测向目标方位角的近似值。
f) 确定曲线拟合区间
信号电平最大的采样点为中心,读取两倍波束宽度内的采样点,总计2N+1个采样点,这些采样点组成待处理的采样点区间。
g) 确定拟合曲线函数
利用最小二乘法处理上述待处理的采样点区间内的采样点,得出拟合曲线函数
y=a0+a1x+a2x2。
式中:x表示方位地理角,y表示信号电平,a0、a1、a2表示拟合曲线系数。
由于x的取值范围是0°~360°,所以在进行曲线拟合过程中运算量比较大,运算时间比较长。于是采用泰勒展开公式将公式y=a0+a1x+a2x2转换为公式y=a0+a1(x-Amax)+a2(x-Amax)2。这样处理后x-Amax是-20.0°~20.0°范围内的数据,相比0°~360°范围内的数据,可以大大减少运算量。
h) 确定测向目标方位角
对拟合曲线函数求导,得出信号电平取极大值时对应的方位地理角,即测向目标方位角。
该方法不但克服了由于方向图过于平坦造成的低频极值不准确缺点,而且克服了高频时,在方向图的顶点接收机只能提供2个数据从而无法准确获得方向图最大值的缺点,从而保证了测向精度。
1.4 新测向技术数据分析
图3~图5为实际测试中利用上述方法获得测向最大值的过程。已知在18GHz时信号方位336.08°,试验中发现高转速下轴角数据CAN总线延迟约0.5°,所以正确目标方位应为336.58°。
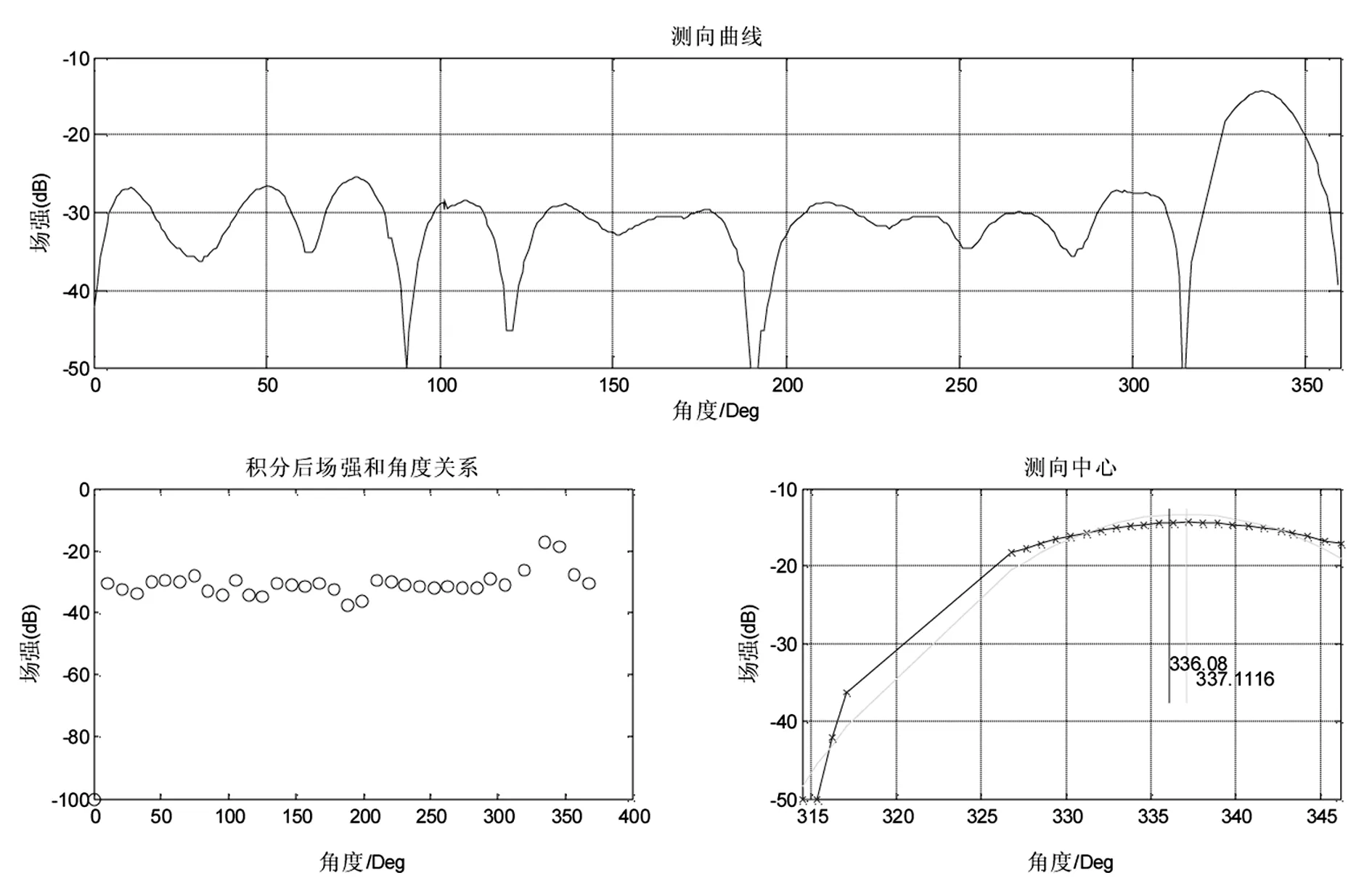
图3 1.5GHz测向数据及最大值判断
图3由于是1.5GHz采用点比较多,在方向图顶部比较平坦,一般方法很难确定最大值。但靠数据拟合曲线的最大值为337.1°,误差很小为0.536°。
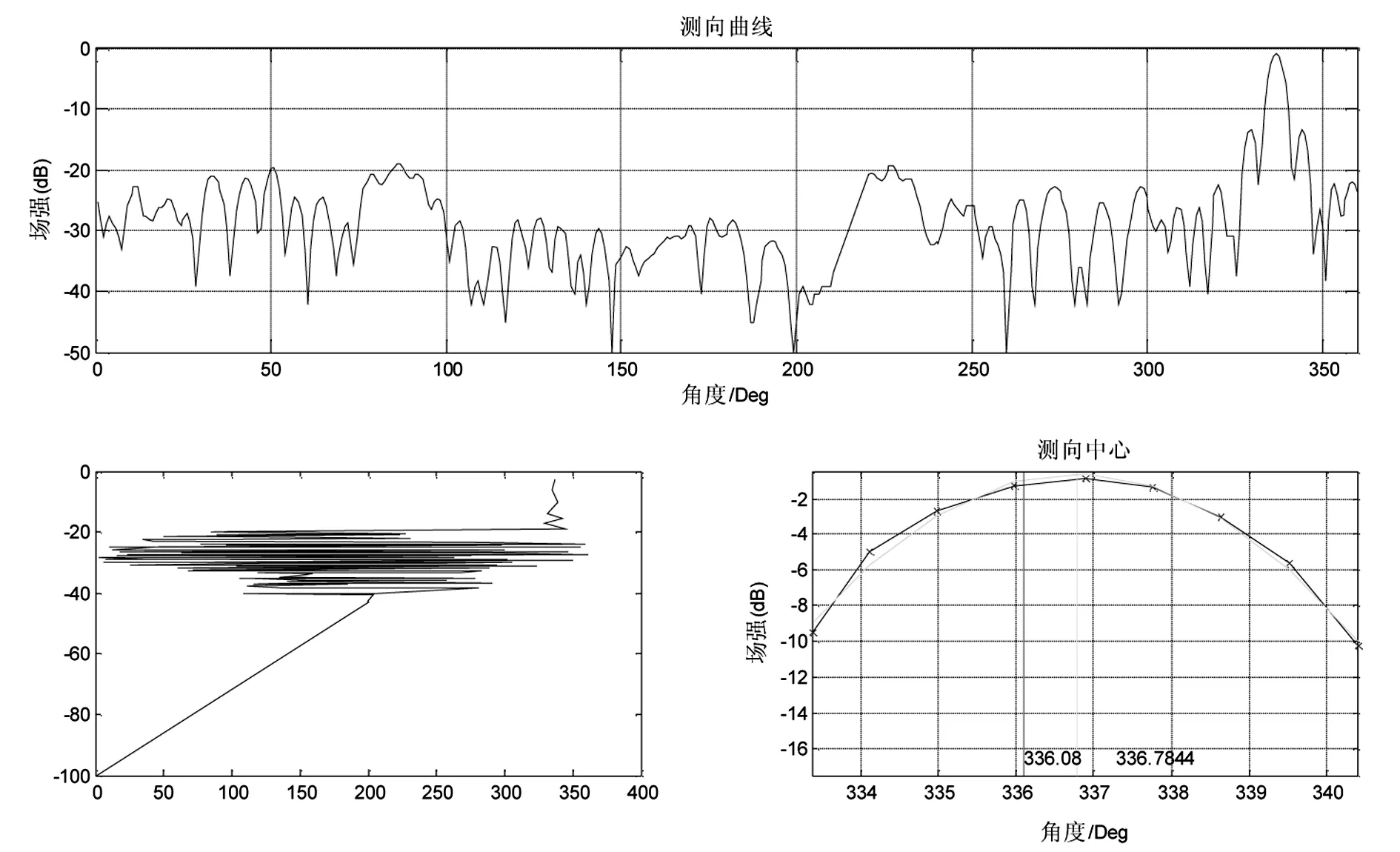
图4 6GHz测向数据及最大值判断
图4为6GHz采用点有所减少,根据拟合曲线得到的最大值为336.78°,误差0.2°。
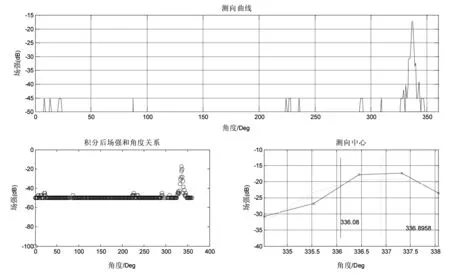
图5 18GHz测向数据及最大值判断
图5为18GHz时,半波束宽度内采样数据仅2个,无法判断最大值。而靠拟合曲线得到的最大值为336.89°,误差0.31°。
1.5 软件实现
实际应用平台是伺服控制器,具体的实施方式:
a) 通过CAN总线采集方位地理角和信号电平
单天线测向时,接收机根据测向频率调整信号电平的更新速率的同时,天线方位轴以180°/s的速度旋转380°,控制器每5ms定时采集采样点,该采样点包含序号、方位地理角和信号电平等参数信息。总计采集422组采样点,采样点存储形式为[ixiyi]。其中,i表示采样点序号、xi表示方位地理角、yi表示电平值。
b) 确定测向目标方位角所在的区间
由于个别采样点中的信号电平误差可能导致的测向目标方位角判断错误,采用如下的操作步骤可以有效的防止。
根据测向频率确定波束宽度。

确定波束宽度内采样点的个数。

c) 确定采样点区间
将N个连续采样点组成的区间定义为采样点区间,前N个采样点组成第一个采样点区间,每次后移N/2(如果N/2不是整数,则取整加一)个采样点再确定下一个采样点区间,以此类推。
d) 确定信号电平平均值最大的采样点区间
计算每个采样点区间内信号电平的平均值,找出信号电平平均值最大的采样点区间,该区间就是测向目标方位角所在的区间。
e) 确定测向目标方位角的近似值
采用冒泡排序法处理步骤c)中测向目标方位角所在的区间,得出信号电平最大的采样点,该采样点内的方位地理角度Amax,即为测向目标方位角的近似值。
f) 确定数据拟合区间
以信号电平最大的采样点为中心,读取两倍波束宽度内的采样点,总计2N+1个采样点,这些采样点组成待处理的采样点区间(包含两倍波束宽度内的采样点个数)。
g) 泰勒公式处理拟合区间的数据
按照曲线拟合方法,对步骤d)中待处理的采样点区间采样点内的方位地理角和信号电平进行曲线拟合处理。拟合曲线公式如下所示:
y=a0+a1x+a2x2
式中,y表示采样数据中的信号电平;x表示采样数据中的方位地理角;a0、a1、a2表示拟合曲线的系数。
但是运行上述公式,会使伺服控制器运算量大大增加,负荷过重,影响软件实时性。为了降低伺服控制器计算量,采用泰勒展开公式对上面公式进行变形处理。泰勒展开公式如下:
y=a0+a1(x-Amax)+a2(x-Amax)2
式中,y表示采样数据中的信号电平,x表示采样数据中的方位地理角;a0、a1、a2表示拟合曲线的系数,Amax表示测向目标方位角的近似值。
h) 确定拟合曲线函数

将其转换为矩阵形式:
根据上述的矩阵形式可以解算出参数a0、a1、a2。
i) 确定测向目标方位角
对拟合曲线函数求导,计算出中心点(测向目标方位角)x0=-a1/2a2。当方位地理角为x0时,信号电平最大。
采用创新型单次测向算法后使得单站单次测向的精度成倍提高并且估值稳定。从实际测试数据看单站单次测向精度为0.31°,比估计值大1.12°,提高3倍。
2 总结
该测向技术具有如下优点:
采用最小二乘法得出测向目标方位角,提高了测向精度;
采用了角度扩展方案,降低了噪声对数据的影响,提高了测向数据的可靠性;
采用了泰勒展开,提高了软件的实时性;
采用信号电平更新速率可调整的方法,也从一定程度上提高了测向精度。
[1] BITTNER J.Efficient Construction of Visibility Maps Using Approximate Occlusion Sweep[C].slovakia,The 18th Spring Comfremce on Computer Graphics,2002:163-171.
[2] 李钊.无源测向定位法[J].无线电工程,2008,38(3):55-57.
[3] 李海鸥.一种快速精确无源定位方法研究[J].空军雷达学院学报,2006,17(3):31-33.
[4] 朱庆厚.无线电检测与通信侦察[M].北京邮电大学出版社,1999.
Research and apply on direction finding technology of a single antenna
ZHANG Shuo,FU Qiang
(The54thResearchInstituteofCETC,ShijiazhuangHebei050081,China)
Direction-finding technology refers to the microwave dection antenna by receiving the target singal or target reflection singal to determine the target position of the technology.In order to improve the direction-finding accuracy,the least-square method is adopted to process the data.
Direction finding technology; Least square method; Data processing
2016-11-20
张 硕(1984-),男,工程师,主要研究方向:控制理论与控制工程、天伺馈系统.
1001-9383(2016)04-0018-07
TN965
A