高速高精度固定角度旋转CORDIC算法的设计与实现
2016-05-31张朝柱韩吉南燕慧智
张朝柱,韩吉南,燕慧智
(哈尔滨工程大学,黑龙江哈尔滨150001)
高速高精度固定角度旋转CORDIC算法的设计与实现
张朝柱,韩吉南,燕慧智
(哈尔滨工程大学,黑龙江哈尔滨150001)
摘要:固定角度旋转的CORDIC(Coordinate Rotation Digital Computer)算法已经广泛的应用于高速数字信号处理、图像处理、机器人学等领域.针对固定角度旋转CORDIC算法在相位旋转过程中,存在数据吞吐率较高、占用硬件资源较多且资源消耗量大等缺点,提出了利用混合CORDIC算法,将角度旋转分为单向角度旋转和一次角度估计旋转两部分.本文根据欠阻尼理论,将固定角度旋转采用单向旋转CORDIC算法实现,减少了流水线的级数和迭代符号位的判决,然后通过对角度估计旋转的二进制表示,修正常数因子,再根据角度映射关系进行相关处理,完成高速高精度坐标旋转.最后在硬件平台上进行了仿真实验.实验结果表明,在误差范围一定的前提下,混合算法进一步的减少了迭代次数,并且资源消耗较低,提高了数据吞吐率.
关键词:坐标旋转数字算法;固定角度旋转;流水线结构;现场可编程门阵列
1 引言
Volder提出的坐标旋转数字计算方法(CORDIC)以其运算及硬件结构简单和多能性而倍受关注,并已广泛应用于信号处理领域.针对其实现的硬件结构,国内外学者也进行了大量研究[1~4].在近期的研究工作中,乘法器的设计与实现成为了其在数字信号处理领域的一个新热点[5~8].但是对于固定相位旋转的设计与实现的研究较少.
固定旋转角度的CORDIC算法已经广泛的应用在高速数字信号处理、机器人学、动画片等领域.在高速数字信号处理领域,数字控制振荡器NCO(Numerical Controlled Oscillator),是数字下变频的重要组成部分.机器人的平行移动通过小角度的旋转,从而完成坐标值的连续叠加[6].计算机图形中关键帧的插入可以采用固定旋转角度的CORDIC旋转[8].
为了解决CORDIC算法中由于迭代次数较多,从而处理时间增加的问题,目前国内外一些学者致力于减少算法的延时.文献[9]提出了一种基于控制理论的任意角度旋转方法,但是以迭代次数的增加为代价.在文献[10,11]中,由于每一次迭代会产生更多的位数,高进制数的CORDIC算法减少了迭代次数,然而Sn的判定增加了循环迭代的时间.文献[12]提出了预测旋转方向,并针对误差进行分析和消除,具有速度快等优点,但是并没有给出使用各种硬件结构实现此种算法的效果,更没有将实验结果进行比对.文献[13]提出了基于相位旋转估计的改进混合式CORDIC算法,提高了输出数据精度,但是迭代次数依然较多,并且硬件资源的一半以上完成的是移位寄存器的操作.
2 传统CORDIC算法
1959年,Voder提出CORDIC算法,1971年Walther统一了该算法的形式,Meyer-base第一次利用FPGA实现了该算法[14].其基本思想是从起始点(xi,yi)按照一定的相位不断进行矢量旋转,逐步逼近最终点(xj,yj).其向量旋转示意图如图1所示.

根据极坐标知识和图1易得:

从起始位置到终点位置的旋转过程可以通过多步来实现,每步只旋转一定相位,则:

把cosθn提取出来,式(2)可重写为:


cosθn可以通过在最终结果上乘一个已知的常数K来加以消除.例如,当迭代次数P =16时,且|θ|≤π/4,有:
所以,在相位旋转过程中,cosθn项可以不予考虑,最后得到旋转迭代公式为:

引入参数z,用来判断迭代何时结束,zn +1= zn-θn,z0=θ.这样当zn<θ时,Sn=-1;当znθ时,Sn= + 1.如果(xi,yi) = (x0,y0) = (K,0),(xn,yn)第P次迭代将收敛于(cosθ,sinθ).CORDIC算法的收敛性满足收敛定理[15].对传统CORDIC算法的计算精度进行全面的分析后,得到CORDIC算法的迭代次数P和相位精度Δθmin之间的关系式:

式中,Δθmin=2π/2N,N为输入相位数据bit宽度.
3 单向固定角度旋转CORDIC算法
3.1单向旋转CORDIC算法
根据传统的CORDIC算法,迭代P次后的剩余角度值为:

由于arctan(2-n)为n的单调递减函数,本文用比较典型的二阶控制系统作为理论模型来讨论CORDIC算法的收敛方式.一个典型的二阶控制系统的传递函数设为,其闭环的阶跃信号响应为:



图2给出了传统的CORDIC算法与单向旋转CORDIC算法的角度收敛曲线图,初始相位为23.345°.图3和图4给出了单向旋转CORDIC算法中不同的旋转角度所需迭代次数的仿真图,相位的位数16位,角度从0.00699°~90°,样本数为899721.

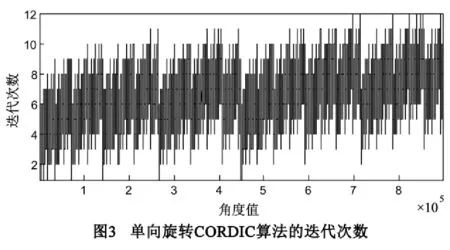

由仿真结果可知,与传统的基于流水线结构的CORDIC算法相比,平均迭代次数减少了29.41%.
3.2一次角度估计的单向旋转CORDIC算法
假设CORDIC算法的输入相位长度为N,迭代次数为P,则旋转相位θ可表示为:

式中,Sn=±1.
随着旋转系数n的增加,arctan(2-n)逼近2-n,根据文献[12],当nm =「(N-log23) /3?,满足arctan (2-n)≈2-n.通过式(7)可知CORDIC算法的迭代次数为PN-2,取P = N-2.式(10)可重新表示为:


此时,实际剩余相位为zm +2,按照传统CORDIC算法的理论,zm +2≈∑θn,由此得zm +2<2-m-1.在第m + 3次旋转时,引入新的旋转相位m +2=m +2,m +2是zm +2的绝对值珓θm +2<2-m-1.为了防止旋转角度超过(-π/2,π/2),此算法做了如下判断:,其中当zm +2<0时,m +2=-1;当zm +20时m +2= + 1.带入式(3)可得:

本次旋转完之后,剩余相位为0,过程结束.N位输入相位经过m +2次迭代得到一个N位2进制数W,即此时的剩余相位zm +2.而也由N位2进制数表示为:

式中,Ai= 1或0;当W[N-1]= 0时,Ai= W[i],当W [N-1]=1时,Ai为W的每一位值取反最后加一.
由相位实际值和它的N位二进制表示值的比例关系,可得:


式中,Bi=1或0.

联立式(13)和式(17)得:
由上可看出,一次相位估计CORDIC算法将传统的旋转相位集{ arctan20,arctan2-1,…arctan2-m-1,…,arctan2-P}简化为{ arctan20,arctan2-1,…,arctan2-m-1,珓m +2}.虽然增加一次移位加法运算,但是与传统的CORDIC算法相比,减少了N-m-3次旋转.
最后,随着流水线级数的减少,常数系数K需要重新规定,即:

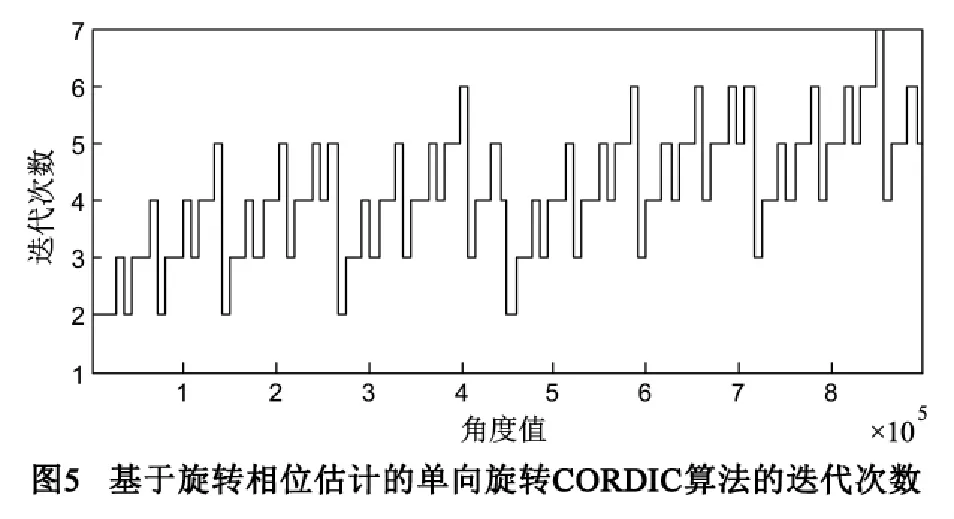
此时把初始值设为: (x0,y0) = (,0),按照上述过程,最后(xm +3,ym +3)将收敛为(cosθ,sinθ).由于是固定角度旋转,所以^K值可以根据所要旋转的角度值预先计算出迭代次数和每一级的旋转角度值.图5和图6给出了基于旋转相位估计的单向旋转CORDIC算法中,不同的旋转角度与迭代次数的仿真图,相位的有效位数14位,角度从0.00699°~90°,样本数为899931.
由仿真结果可知,迭代次数同样近似服从高斯分布,与传统的基于流水线结构的CORDIC算法相比,平均迭代次数至少减少了75.82%.
4 固定角度旋转的硬件设计与实现
本文实现高速高精度固定角度的CORDIC算法的硬件结构图如图7所示.表1为固定角度旋转CORDIC算法输出端的象限映射表.
图8~图10分别给出了三种CORDIC算法的硬件结构,表2对三种算法的硬件结构进行了对比.基于相位估计的单向旋转CORDIC算法采用高效流水线结构,需要3次单向相位旋转,1次估计相位旋转.在高速高精度的数控振荡器模块中,设定每次固定旋转角度为23.345°,可知单向旋转次数为三次,通过3.2节的计算可知=2-8+2-9+ 2-10,最后一级流水线单元只需3个加减法器、6个移位寄存器和一个相位系数存储器,且无需旋转方向判定.

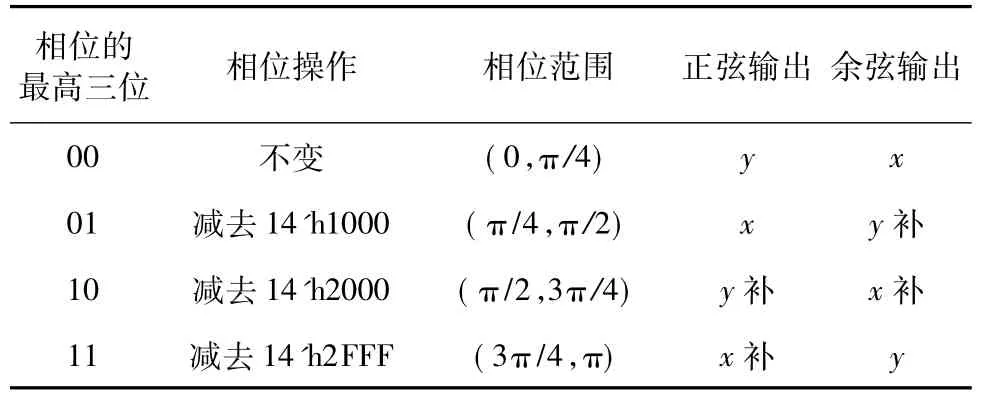
表1 固定角度旋转CORDIC算法输出端的象限映射表
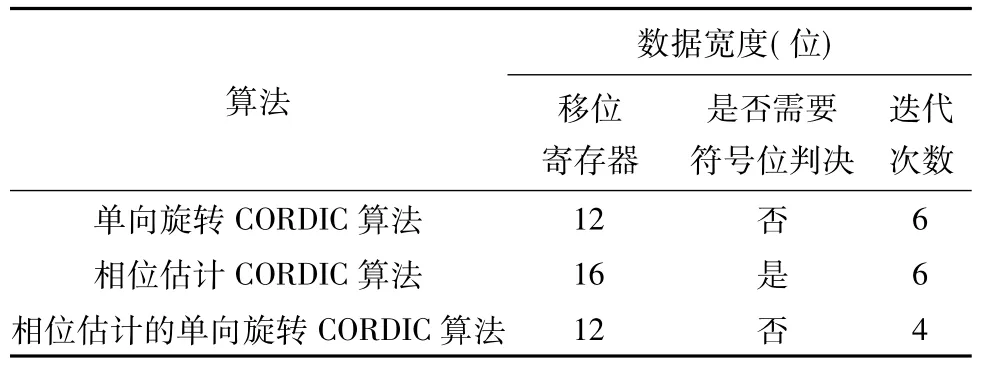
表2 硬件结构比较
5 系统仿真与验证
本文根据图8~图10所示硬件结构,在不同相位宽度的条件下,将本文算法与现有的CORDIC算法进行资源使用量,旋转相位后的相位误差、坐标位置误差进行比较.硬件描述语言采用Verilog语言,基于EP2C8Q208C8芯片和QuartusⅡ软件平台搭建模块进行系统级仿真.
设定每次固定旋转角度为23.345°.将本文所提出的CORDIC算法与其他几种算法的使用资源进行对比,如图11、12所示.通过图11、12可知,各种算法的资源使用量都是随着相位宽度的增加而增加;在相同的相位宽度下与其他几种CORDIC算法相比,相位估计的单向旋转CORDIC算法资源消耗量最少.
将文所提出的CORDIC算法与其他几种算法的固定角度旋转理论值与实际值进行比较,误差统计结果如表3所示.通过比较可知,在相同的数据宽度下,相位估计的单向旋转CORDIC算法输出的坐标位置误差最大.但是随着数据宽度的增加它的误差范围将被缩小,当数据宽度增加到18以上时,坐标位置误差将被控制在(-6×10-4,6×10-4)内,说明本文的所提出的算法在减少迭代次数的基础上,保证了输出正余弦数据的精度.

6 结束语
针对固定角度旋转CORDIC算法在相位旋转过程中,存在数据吞吐率较高、占用硬件资源多且资源消耗量大等缺点,提出了利用混合CORDIC算法.将本文算法与现有的CORDIC算法进行资源使用量、旋转相位后的相位误差、坐标位置误差进行比较,实验数据表明,当数据宽度增加到18位以上时,该算法将误差控制在(-6× 10-4,6×10-4),迭代次数、逻辑资源使用量以及寄存器资源使用量较现有的算法有了较为明显的减少.

表3 坐标位置误差值比较
参考文献
[1]Pramod Kumar Meher,SangYoon Park.CORDIC designs for fixed angle of rotation[J].IEEE transactions on very large scale integration(VLSI) systems,2013,21(2) : 217 -227.
[2]Shen-Fu Hsiao,Yu-Hen Hu,Tso-Bing Juang.A memoryefficient and high-speed sine/cosine generator based on parallel CORDIC rotations[J].IEEE signal processing letters,2004,11(2) : 152-155.
[3]C-S Wu,A-Y Wu,C-H Lin.A high-performance/low-latency vector rotational CORDIC architecture based on extended elementary angle set and trellis-based searching schemes[J].IEEE Trans Circuits Syst II,Analog Digit.Signal Process,2003,50(9) : 589-601.
[4]T-B Juang,S-F Hsiao,M-Y Tsai.Para-CORDIC: Parallel cordic rotation algorithm[J].IEEE Trans Circuits Syst I,Reg Papers,2004,51(8) : 1515-1524.
[5]Zhang G,Chen,F Parallel FFT with CORDIC for ultra wide band[A].In Proc of 15th IEEE International Symposium on Personal,Indoor and Mobile Radio Communications[C].Barcelona: IEEE,2004.1173-1177.
[6]P K Meher,J K Satapathy,G Panda.Efficient systolic solution for a new prime factor discrete Hartley transform algorithm[J].IEE Proc Circuits,Devices Syst,1993,140(2) : 135-139.
[7]张晓彤,辛茹,王沁,李涵.基于改进混合式CORDIC算法的直接数字频率合成器设计[J].电子学报,2008,36 (6) : 1144-1148.Zhang Xiao-tong,et al.Design of direct digital frequency synthesizer based on improved hybrid CORDIC algorithm [J].Acta Electronica Sinica,2008,36(6) : 1144-1148.(in Chinese)
[8]T Lang,E Antelo.High-throughput CORDIC-based geometry operations for 3D computer graphics[J].IEEE Trans.Computer,2005,54(3) : 347-361.
[9]S Wang,E E Swartzlander,Jr.Critically damped CORDIC algorithm[A].The 37th Midwest Symp Circuits and Systems[C].Lafayette,LA: IEEE,1994.236-239.
[10]Kaushik B,Rakesh B.Architectural design and FPGA implementation of radix-4 CORDIC processor[J].Microprocessors and Microsystems,2010,34(2-4) : 96-101.
[11]E Antelo,J Villalba,J D Bruguera,E L Zapata.High performance rotation architectures based on the radix-4 CORDIC algorithm[J].IEEE Trans Computers,1997,46 (8) : 855-870.
[12]Wang S,Piuri V,et al.Hybrid CORDIC algorithms[J].IEEE Transaction on Computers,1997,46 (11) : 1202 -1207.
[13]Chaozhu Zhang,Jinan Han,Ke Li.Design and implementation of hybrid CORDIC algorithm based on phase rotation estimation for NCO[J/OL].The Scientific World Journal,http: / /www.hindawi.com /journals/tswj/2014/ 897381,2014-7-7.
[14]J Volder.The CORDIC trigonometric computing technique[J].IRE Trans on Electronic Computers,1959,8: 330-334.
[15]J Walther.A unified algorithm for elementary functions [A].Joint Computer Conference[C].Atlantic: Spring,1971.379-385.

张朝柱男,1970年生于辽宁省大连市,博士生导师,研究方向为信号处理在雷达、通信中的应用研究;雷达对抗技术研究.
E-mail: zhangchaozhu@ hrbeu.edu.cn

韩吉南(通信作者)男,1988年生于黑龙江省牡丹江市,男,博士研究生,研究方向为导航卫星信号处理算法.
E-mail: hanjinanbuaa@163.com
Design and Implementation of CORDIC Algorithm for High Speed and Precision Fixed Angle of Rotation
ZHANG Chao-zhu,HAN Ji-nan,YAN Hui-zhi
(School of Information and Communication Engineering,Harbin Engineering University,Harbin,Heilongjiang 150001,China)
Abstract:Coordinate Rotation Digital Computer (CORDIC) algorithm for fixed angle of rotation has been widely applied in many fields,including digital signal processing,image processing and robotics.CORDIC algorithm,based on fixed angle of rotation,has an advantage of high data throughput,but it takes up much more hardware resources.To remedy these problems,a hybrid CORDIC algorithm is proposed in this paper,which separates the angle rotation into two steps,unidirectional angle rotations and angle estimation ones.According to the under-damping theory,the unidirectional phase rotations are employed to realize the fixed angle of rotation,which reduces the stage of pipeline and judgment of sign bit.Through the binary representation,the constant factor will be fixed.According to the phase mapping relationship,the high speed and precision fixed angle of rotation is completed.Finally the hybrid algorithm is implemented on a hardware platform and the experimental results show that it can further reduce the number of iterations and resource consumption and obtain high though-put rate.
Key words:CORDIC (Coordinate Rotation Digital Computer) ; fixed angle rotation; pipeline architecture; FPGA (Field-Programmable Gate Array)
作者简介
基金项目:国家自然科学基金(No.61172159)
收稿日期:2014-08-29;修回日期: 2015-05-11;责任编辑:马兰英
DOI:电子学报URL: http: / /www.ejournal.org.cn10.3969/j.issn.0372-2112.2016.02.033
中图分类号:TN713.7; TN431.2
文献标识码:A
文章编号:0372-2112 (2016) 02-0485-06
