基于云模型的智能驾驶车辆变粒度测评研究
2016-05-31高洪波张新钰张天雷刘玉超李德毅1
高洪波 张新钰 张天雷 刘玉超 李德毅1,,
(1.北京航空航天大学软件开发环境国家重点实验室,北京100191; 2.清华大学信息技术中心,北京100083; 3.清华大学计算机学院,北京100083; 4.电子系统工程第61研究所,北京100039)
基于云模型的智能驾驶车辆变粒度测评研究
高洪波1,2张新钰2张天雷3刘玉超4李德毅1,3,4
(1.北京航空航天大学软件开发环境国家重点实验室,北京100191; 2.清华大学信息技术中心,北京100083; 3.清华大学计算机学院,北京100083; 4.电子系统工程第61研究所,北京100039)
摘要:如何通过直观、简单和有效的测评方法,建立一个定性与定量的不确定性测评转换模型,实现智能驾驶车辆的测评研究,已成为智能驾驶车辆研究领域急需面对和解决的一个基本问题,也是一个难题.为了解决这个问题,本文提出一种基于云模型与变粒度的测评方法.首先,提出一套4S变粒度测评体系与三级智商变粒度测评体系;其次,通过云模型将智能驾驶车辆的定性测评转化为直观、形象的定量测评,利用云模型的期望、熵与超熵对智能驾驶车辆进行定量评价,从而建立一个由定性到定量的测评转换模型.为解释这个模型的实施,2013年未来挑战赛的实例被采用.实验的分析表明,在具有定性与定量的测评中,利用云模型的期望、熵与超熵作为定性评价的定量评价的依据,并且,基于云模型与变粒度的智能驾驶车辆的测评能够有效地解决多目标粒度的测评与描述性的定性评价的定量评价,从而解决了一类智能驾驶车辆的测评研究问题.
关键词:云模型;变粒度;智能驾驶车辆;测评研究
1 引言
随着无人驾驶车辆研究的不断深入.美国、欧洲和中国分别在2004年、2006年和2009年开始在统一的测试环境、内容与评判标准下,有组织地举办无人驾驶车辆赛事[1、2].通过赛事增进各研究机构之间的沟通与交流,促进无人驾驶车辆研究的发展.主要的无人驾驶车辆赛事包括:美国DARPA分别于2004年、2005年、2007年和2012年举办两届Grand Challenge、一届Urban Challenge和一届Robotics Challenge;自2006年至今欧洲连续8届组织ELROB比赛;自2009年至今NSFC连续5届举办“中国智能车未来挑战”赛[3、4].除了上述有组织地进行无人驾驶车辆比赛之外,引起关注的还有意大利帕尔玛大学的洲际挑战赛与谷歌无人驾驶的研究.
由于无人驾驶车辆测评研究的重要性,由此开展的相关研究有: (1)基于位置及行驶轨迹的测评,Oliver wulf将公路局的精确地图和蒙特卡洛的定位信息作为真值,对6D同时定位与地图构建(Simultaneous Localization and Mapping,SLAM)定位算法的性能进行评价[5].J.Guivant利用RTK-GPS对SLAM算法进行实验评价[6],通过SLAM定位的误差曲线来评价其定位性能的优劣.S.Bren Colegrove建立了一套比较完整的轨迹跟踪评价指标体系并提出了基于专家评分的指标权重分配方法[7].Urmson.C[8]对无人驾驶车辆Boss的导航能力进行了测试和评价; (2)基于视觉的测评,Javier Diaz Alonso[9]使用激光雷达检测车辆换道时周边车辆的位置,与车辆上的GPS定位的位置坐标进行对比,做出评价结果; (3)基于学习能力的测评,Shneie对无人驾驶车辆的地形通过的学习能力进行评测,通过检测多次通过后地形识别的误差,对车辆的学习能力进行了评估[10].Wagan提出了HCD(Harris Corner Detector)方法,用以得到真值和被测数据的特征点,利用特征点的匹配程序估计地图构建的能力[11].Censi提出了利用贝叶斯边界的方法用来评价两个不同无人驾驶车辆的SLAM能力[12]; (4)基于任务中心的量化测评,卡内基梅隆大学的学者针对无人驾驶车辆Boss在提出了一套结合成本的量化评价方法[13].Jurriaan van Diggelen[14]提出了一种应用为中心的无人驾驶车辆评价方法.
无论是国内外有组织的无人驾驶车辆竞赛测评,还是开展的相关测评研究,这些测评规则的设计都是按照其自身的无人驾驶车辆特点量身定制的,因此,这些测试不能够全面、系统、客观地反映无人驾驶车辆的认知能力水平.为了全面、系统、客观地测试与评价智能驾驶车辆的认知能力,必须系统地开展无人驾驶车辆认知测试的研究.须通过在规范的测试环境中对智能驾驶车辆进行测评,以达到验证智能驾驶车辆的安全性、可靠性、稳定性和智能性,又可以规范智能驾驶车辆技术的研究.
本文的基本思想是提出4S测评体系即安全性测评、智能性测评、平衡性测评、速度性测评与三级智商测评体系即低智商测评(LQ-测评)、中智商测评(MQ-测评)、高智商测评(SQ-测评),即多目标测评粒度的系统方法;然后通过使用云模型的期望、熵将智能驾驶车辆的定性测评转化为直观、形象的定量评价,从而建立一个由定性到定量的不确定性转换模型.
2 智能驾驶车辆测评体系
2.1定义
定义1智能驾驶(Intelligent Drive,Smart Drive)包含无人驾驶与智能辅助驾驶两种,而无人驾驶是智能驾驶发展的重要标志[15].
定义2自动驾驶(Autonomous Drive,Self-piloting Drive) :又称无人驾驶,依靠人工智能、视觉计算、雷达、监控装置和全球定位系统协同合作,车辆在没有任何人类主动的操作下,自动安全地操作机动车辆.
而在本文中出现智能驾驶与无人驾驶两种名称,由于国外文献中称无人驾驶,为了忠于原文,而国内称智能驾驶,为了忠于我们的研究,而从上面的定义中能看出两者之间的关系.
定义3 4S测评体系包括测试智能驾驶车辆的安全性(Safety)、智能性(Smartness)、平衡性(Smoothness)和速度性(Speed),简称为4S测评体系.
定义4三级智商测评体系是根据智能驾驶车辆技术自身发展水平、自然科学发展的规律与人类认知水平发展的规律,由易到难、由简单到复杂建立了智能驾驶车辆的三级智商测评体系,包括低智商测评(LQ-测评)、中智商测评(MQ-测评)、高智商测评(SQ-测评).
2.2智能驾驶车辆4S变粒度测评体系
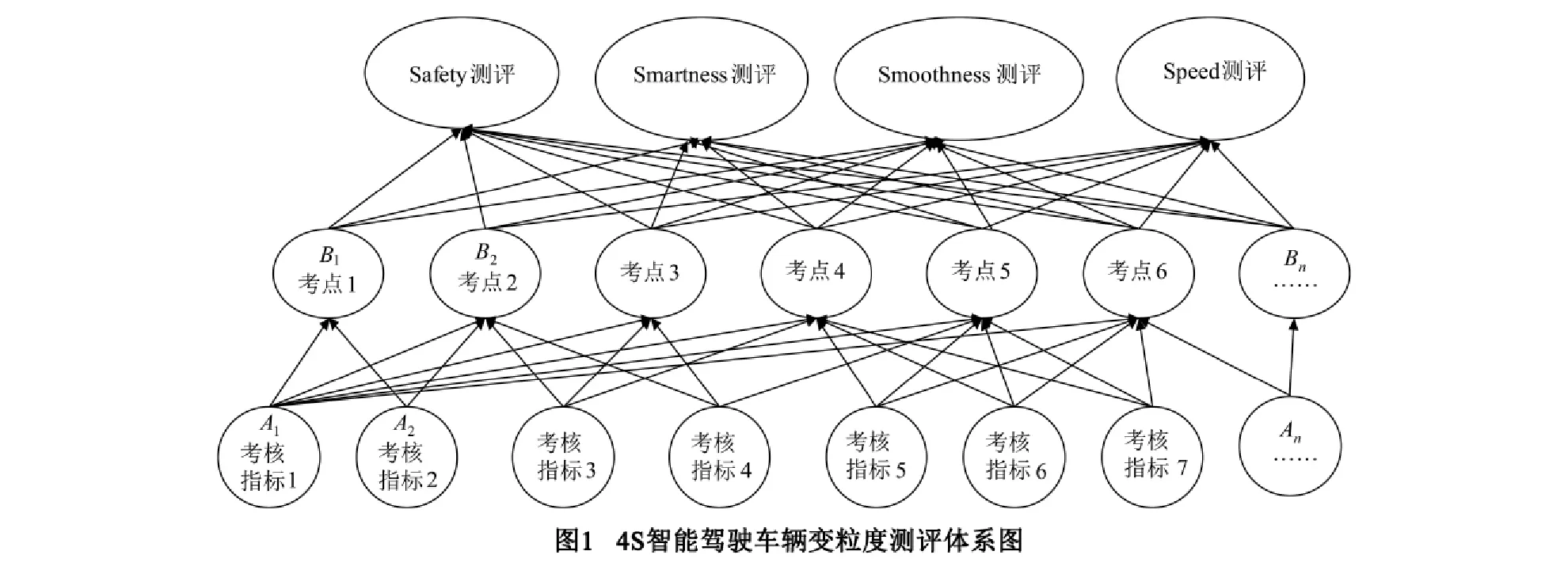
智能驾驶车辆测评根据实际的考核指标项,以及相应的考核指标项在实际环境中受到的影响因素,比如:光照、可见度、雾、阴影等,由相应的权重值给出影响程度.基于实践的证明,提出基于4S智能驾驶车辆测评体系,如图1所示.由下向上第一层为考核指标层,第二层是考点层,第三层是4S考核层.而在实际考核过程中,以实际的目标粒度测评需求,提出以实际测评中量值传递原理的变粒度的测试方法.分别以考核指标项、考点项、4S项作为粒度.对智能驾驶车辆进行变粒度考核,可以是指标单项、考点单项、4S单项与组合测评.
2.2.1考核指标粒度
如图2所示,智能驾驶车辆4S多粒度测评体系的最低层是细化的考核指标,它包含在各个考点中,各细化的考核指标是相互不连通的.每个细化的考核指标根据具体的考核内容有相应的、直接定性的描述性评价与定量的评价,各考核指标的得分用A1,A2,…,An表示.

2.2.2考点粒度
如图3所示,在考核指标粒度的基础上,考点的考核是通过包含其中的考核指标考核进行体现的,不同的考点可以包含相同的考核指标,而同一考核指标在不同的考点中的影响程度是不同的,即权重是不同的,各考点得分用B1,B2,…,Bn表示.考点的得分是考点中的考核指标的得分与其在考点中的权重的乘积.例:如图3所示,考核指标1、考核指标2、考核指标3、考核指标4的得分分别为A1,A2,A3,A4,考点2的得分为B2,考核指标1、考核指标2、考核指标3、考核指标4在考点2上的权重分别为α12,α22,α32,α42.则考点2的得分计算公式如式1所示.


2.2.34S粒度
如图4所示,在考点粒度的基础上,4S的考核是通过包含其中的考点考核进行体现的,不同的S测评可以包含相同的考点,而同一考点在不同的S测评中的影响程度是不同的,即权重是不同的,各S得分用RSafety,RSmartness,RSmoothness,RSpeed表示,分别是安全性、智能性、平衡性和速度性.S的得分是S中所包含考点的得分与所包含的考点在S中的权重的乘积之和.例:如图4所示,考点1、考点2、考点3、考点4的得分为B1,B2,B3,B4.Safety的得分为RSafety,考点1、考点2、考点3、考点4在Safety上的权重分别为β1Safety,β2Safety,β3Safety,β4Safety,则Safety的得分计算公式如式2所示.


2.3智能驾驶车辆三级智商变粒度测评体系
根据智能驾驶车辆技术自身发展水平、自然科学发展的规律以及人类认知水平发展的规律,由易到难、由简单到复杂建立了智能驾驶车辆三级智商的测评体系,低智商测评(LQ-测评)、中智商测评(MQ-测评)、高智商测评(SQ-测评) ;这是基于人类认知水平的测试与评价.
如图5所示,在4S粒度的基础上,三级智商的考核是通过包含其中的S考核进行体现的,不同级智商测评可以包含相同的S,而同一S在不同级智商测评中的影响程度是不同的,即权重是不同的.三级智商得分用ValueLQ,ValueMQ,.ValueSQ表示.不同级智商的得分是不同级智商中的S得分与其在不同级智商中的权重的乘积.例:如图5所示,Safety,Smartness,Smoothness,Speed的得分为RSafety,RSmartness,RSmoothness,RSpeed,Safety,Smartness,Smoothness,Speed在MQ上的权重分别为γSafetyMQ,γSmartnessMQ,γSmoothnessMQ,γSpeedMQ,则MQ级智商的得分计算公式如式3所示.


3 云模型
3.1云的概念和定义
定义5设U是一个用精确数值表示的定量论域,C是U上的定性概念,若定量值x∈U是定性概念C的一次随机实现,x对C的确定度u(x)∈[0,1]是有稳定倾向的随机数:

则x在论域U上的分布称为云,记为云C(X).每一个x称为一个云滴[16].
上述定义的云具有下列重要性质:
(1)定义中的论域U可以是一维的,也可以是多维的.
(2)定义中提及的随机实现,是概率意义下的实现.定义中提及的确定度,是模糊集合意义下的隶属度,同时又具有概率意义的分布,体现了模糊性和随机性的关联性.
(3)对于任意一个x∈U,x到区间[0,1]上的映射是一对多的变换,x对C的确定度是一个概率分布,不是一个固定的数值.
(4)云由许许多多的云滴组成,云滴之间无次序性,一个云滴是定性概念在数量上的一次实现,云滴越多,越能反映这个定性概念的整体特征.
(5)哪个云滴出现的概率大,那个云滴的确定度就大,该云滴对概念的贡献就大.
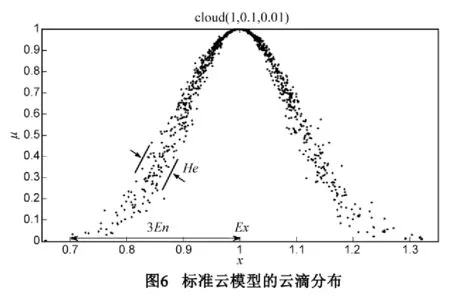
定义6一维正态云的数字特征表示:一维正态云由三个数字特征元组C = (Ex,En,He)[16]构成,如图6所示,其中:
期望Ex:云滴在论域空间分布的数学期望.就是最能够代表定性概念的点,或者说是这个概念量化的最典型样本.
熵En:代表定性概念的可度量粒度,熵越大,概念越宏观.是定性概念不确定性的度量,由概念的随机性和模糊性共同决定.一方面,En是定性概念随机性的度量,反映能够代表这个定性概念的云滴的离散程度;另一方面,又是定性概念亦此亦彼性的度量,反映了在论域空间可被概念接受的云滴的取值范围.
超熵He:是熵的不确定性度量,即熵的熵,由熵的随机性和模糊性共同决定.对于一个在一定范围内能够被接受的概念,超熵较小;对于还难以形成共识的概念,则超熵较大.
定义7正态云的定量表示[17]:正态云的定量表示是二元序偶的集合: CG = { (xi,ui) |xi为C的云滴,ui为云滴xi的确定度的概率分布,1≤i≤n} n为序偶的个数,xi,ui(1≤i≤n)均根据正向云发生器(Forward Normal Cloud Generator)得到.
定义8正向云发生器是从定性概念到定量的映射,根据云的数字特征(Ex,En,He)产生云滴[18].定义如下:
其中NORM(u,δ2)为期望为u,方差为δ2的正态随机变量.
4 智能驾驶车辆测评方法
在智能驾驶车辆测评指标中,有些是可以通过试验获得精确数值的定量指标;有些是定性描述指标,其试验结果难以用精确的数值表示,在实际的评估中,适合用区间或者语言表示.针对难以量化的指标,采用区间数的形式表示定性知识.根据智能驾驶车辆的测评研究中定量指标与定性指标共存的现象,分别采用精确值、区间数进行测评,对于区间数测评的结果运用云模型将其转换成定量指标的精确数值,最终将其统一转换为精确数值进行运算.
4.1精确值测评
对于定量指标,通过测试人工打分与计算机打分,可直接获得各指标的得分情况.如压车道线次数总分为100分,压一次车道线扣10分,如果某智能车压了3次,则它的得分为70分(本文采用百分制进行定量评分).
4.2区间数测评
对于定性指标,由于其测评结果具有一定的不确定性,可采用区间数进行评分,然后通过云模型将区间数转化精确值,区间数评估与云模型的结合运用使测评结果更为科学与合理.下面给出区间数测评的步骤.
(1)确定智能驾驶车辆考核指标集:

其中eq,q =1,2,…n为智能驾驶车辆考核指标.
(2)确定考核指标集对应的评语集与区间数:

其中Comment为确定的评语集,为c1,c2,c3,c4,c5,分别对应{很好,好,一般,较差,差},V为与评语集对应的区间数,为,分别对应
然后将统计的样本利用逆向云发生器模型得出参数(Ex,En,He).然后利用文献[19]中的逆向云发生器模型进行计算.当统计样本个数较少时,建议采用文献[20]中的拟合算法进行计算.本文采用的是加权逆向云测评算法,如下3.3所述.
4.3加权逆向云测评算法
输入N个云滴的集合E = { e1,e2…eN}及云滴的权值集合{ w1,w2,…wN}.
输出N个云滴所表示的定性概念的期望Ex、熵En、和超熵He.
步骤:
(1)根据ei及其权值计算样本均值一阶样本绝对中心矩,样本方差: S2=
4.4测评步骤
(1)确定定性与定量考核指标,定量考核指标用精确值表示,定性考核指标用区间数表示并确定对应的区间数.
(2)将每一位裁判在考核指标粒度的定性评价转换为区间数,再通过逆向云模型产生测评值矩阵

同样,通过逆向云模型将定量评价也转换为测评值矩阵

其中q1为定性评价考核指标的个数,q2为定量评价考核指标的个数.
(3)将定性评价与定量评价生成的测评值矩阵进行合成,生成考核指标粒度总的测评矩阵
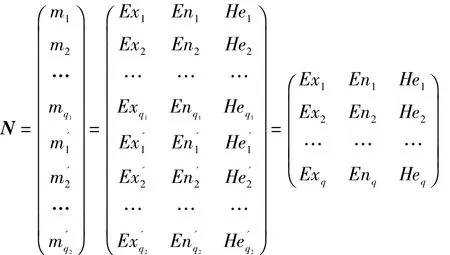
其中,q表示考核指标数量.
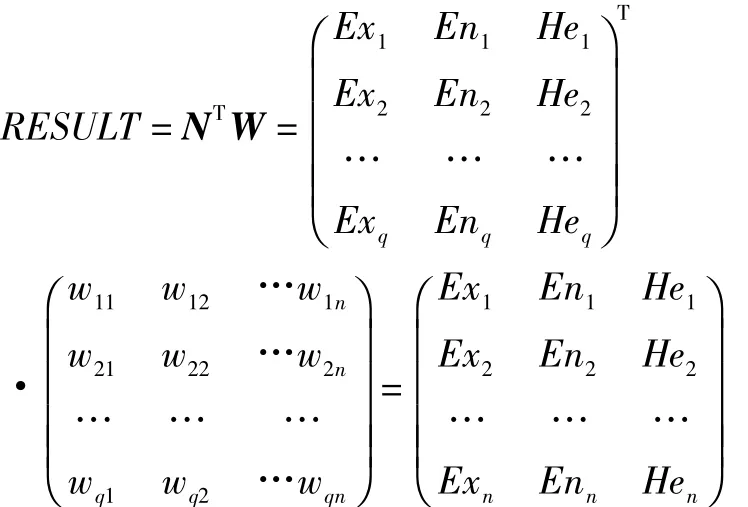
(4)每一考核指标在上层各考点的权重为wij(i = 1,2…q; j =1,2…n),其中,i表示某一考核指标,q表示考核指标数量.j表示某一考点,n表示考点数量.权重系数矩阵表示为
(5)根据加权逆向云测评算法计算得出所有考点粒度得分的测评结果矩阵
(7)根据加权逆向云测评算法计算得出所有S粒度得分的测评结果矩阵
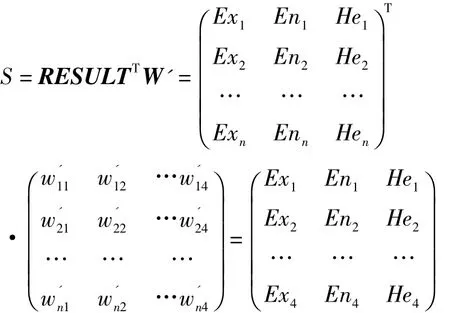
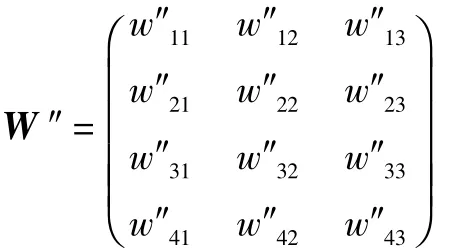
(8)每一S考核项在上层三级智商考核项的权重为w″ij(i =1,2,3,4; j =1,2,3),其中,i表示某一S考核项.j表示某一级智商考核项.权重系数矩阵表示为
(9)根据加权逆向云测评算法计算得出三级智商粒度得分的测评结果矩阵

根据测评步骤,根据步骤(3)总的考核指标测评矩阵可以获得各考核指标粒度的得分,根据步骤(5)总的考点测评矩阵可以获得各考点粒度的得分,根据步骤(7)总的4S考核项测评矩阵可以获得各S粒度的得分,根据步骤(9)总的三级智商测评矩阵可以获得各级智商粒度的得分.根据测评步骤不同的步骤反映不同的测评层次,不同的测评层次所获得的粒度不同,其中考核指标粒度最细,三级智商粒度最粗.根据此测评步骤得出的测评结果,对智能车进行不同层次与不同粒度要求的测评结果进行排序.首先根据期望Ex的分数进行排序,在期望相同或相近的情况下,考虑稳定性即熵En,最后考虑随机性即超熵He.
5 算例与分析
智能驾驶车辆的测评系统根据测评粒度的不同分为4S粒度测评与三级智商粒度测评.4S粒度测评可以根据测评需求将粒度进一步划分为考核指标粒度测评、考点粒度测评与4S粒度测评;三级智商粒度可以根据测评需求测试不同级别的智商,具体粒度测评划分的操作方法见2.2节与2.3节.为验证基于云模型智能驾驶车辆变粒度测评方法的有效性,下面给出具体操作的算例.此算例的数据来源于部分有效的FC2013数据.测评对象为智能驾驶车辆Vehicle1,Vehicle2,Vehicle3.测评过程中通过5名智能驾驶测评领域的专家为裁判Expert1,Expert2,…,Expert5对考核指标进行定性与定量测评.
5.1考核指标粒度测评
考核指标集参照FC2013智能车挑战测评要求确定,指标集确定为: Factor = { e1,e2,e3,e4,e5,e6,e7,e8,e9} = {车道保持,防碰撞,车速限制,避障,识别红绿灯,距停车线,任务完成时间,异常停车,交通标志识别},其中e3,e6,e7,e8为定性考核指标,e1,e2,e4,e5,e9为定量考核指标.考核指标测评结果定性与定量度量值及云化结果如表1、表2所示.
5.2考点粒度测评
选取具有代表性的“通过路口”考点,“通过路口”考点中的考核指标有车道保持、车速限制、异常停车、防碰撞、避障、识别红绿灯、识别停车线、识别交通标志等基本动作和任务完成时间等,而这些考核指标在“通过路口”考点中的权重分别为α11、α21、α31、α41、α51、α61、α71、α81、α91.表示为矩阵的形式为W =[0.15,0.1,0.1,0.1,0.05,0.15,0.2,0.1,0.05].通过加权逆向云测评算法可以得出三辆智能车在“通过路口”考点的云数字特征测评结果如表3所示.

表1 定性因子测评及云化结果

表2 定量因子测评及云化结果

表3 云的数字特征测评结果
从表3与图7可以看出三辆智能车在“通过路口”考点中,Vehicle2智能车稳定性最好,Vehicle2熵最小,期望最大,一致程度越高,其次是Vehicle3、稳定性最差的是Vehicle1.Vehicle1熵最大,期望最小,一致程度越低.而超熵体现了熵的随机性,在本研究中可以作为参考.而本文的4S考核项粒度测评是在考点粒度测评的基本上根据考核某项S的得分而选取考点,并通过专家设置所有考点在此考核S上的权重值.具体操作方法与考点测评相同.

Schoner[21]应用动力学系统理论定量分析机器人行为.Nehmzow[22]应用统计学方法评估移动机器人的定位系统性能.Gat[23]通过测量到达目标的时间和距离,对移动机器人和仿真结果进行对比.Tom Duckett[24]对移动机器人定位质量评价提出了一般性能测量和标准的试验程序.从上述文献的分析可以看出,目前移动机器人行为的定量分析是简单的室内环境以及简单的执行任务(如圆轨迹跟踪,沿墙行走,避障等)的单项目定量分析,并未实现移动机器人在复杂环境以及复杂任务下的多任务粒度的定量总体分析.而本文提出的基于云模型的智能驾驶车辆变粒度测评的方法与现有的测评方法相比,是综合多粒度、多层次、多需求的综合性地定量分析,通过云模型的特点能很好地全面地定量地评价智能驾驶车辆的单个与综合性能.
6 结论
本文提出的基于云模型的智能驾驶车辆变粒度测评思路和方法,具备较强的扩展性、适应性与操作性: (1)针对智能驾驶车辆包含难以量化的、模糊的、不确定的定性指标,提出利用精确值、语言值转换为区间值的表示,并将其统一转换为云模型进行运算,实现了定性向定量转换,主观偏好与客观数据相融合,提高了评估的科学性; (2)对于不同的目标粒度的测评需求,提出以实际测评中量值的传递原理的测试与评价方法; (3)常规的测评方法弱化了测评的模糊性、随机性、统计性,评定结果有失说服力;而是由大量云滴组成的云滴分布图作为输出.同时,云模型变粒度的测评方法同时从稳定性、随机性和模糊性多方面进行测评,符合人类对复杂事物不确定性认知的客观要求与本质,对于分析各种测评问题具有更大的参考价值.
参考文献
[1]Thorpe C.Vision and navigation for the Carnegie-Mellon Navlab[J].IEEE Trans,1990,PAMI-10(3) : 362-373.
[2]Pomerleau D A,Jochem T M.Rapidly adapting machine vision for automated vehicle steering[J].IEEE Expert,1996,11(2) : 19-27.
[3]史美萍,彭晓军,贺汉根.全虚拟无人车辆自主导航仿真系统的研究与实现[J].系统仿真学报,2004,16(8) : 1721-1724.SHI Mei-ping,PENG Xiao-jun,HE Han-gen.Research an accomplishment of auto-navigating simulation system for virtual unmanned vehicles[J].Journal of System Simulation,2004,16(8) : 1721-1724.(in Chinese)
[4]钱钧,杨汝清,王晨,等.基于路标的智能驾驶车辆定位[J].上海交通大学学报,2007,41(6) : 894-898.QIAN Jun,YANG Ru-qing,WANG Chen,et al.Landmark based localization of intelligent vehicle[J].Journal of Shanghai Jiaotong University,2007,41(6) : 894-898.(in Chinese)
[5]Oliver Wulf,et al.Ground truth evaluation of large urban 6D SLAM[A].2007 International Conference on Intelligent Robots and Systems[C].San Diego,CA: IEEE Computer Society,2007.650-657.
[6]Joes Guivant,et al.Autonomous navigation and map building using laser range sensors in outdoor applications[J].Journal of Robotic Systems,2000,17(10) : 565-583.
[7]Colegrove S.B,et al.Tracking system performance assessment[A].2003 6thInternational Conference on Information Fusion[C].Australia: IEEE Computer Society,2003.926 -933.
[8]C.Urmson,et al.Autonomous driving in traffic: Boss and the urban challenge.[J].AI Magazine,2009,30(1) : 17 -29.
[9]Javier Diaz Alonso,et al.Lane-change decision aid system based on motion-driven vehicle tracking[J].IEEE Trans.on vehicular technology,2008,57(5) : 2736-2746.
[10]Shneier M,et al.Performance evaluation of a terrain traversability learning algorithm in the DARPA LAGR program [A].2006 Performance Metrics for Intelligent Systems archive Proceedings of the 6thWorkshop on Performance Metrics for Intelligent Systems table of contents Gaithersburg [C].Washington,DC: IEEE Computer Society,2006.103 -110.
[11]Wagan A,et al.Map quality assessment[A].2008 Performance Metrics for Intelligent Systems archive Proceedings of the 8thWorkshop on Performance Metrics for Intelligent Systems table of contents Gaithersburg[C].Maryland: ACM Press,2008: 278-282.
[12]Censi A.The role of bayesian bounds in comparing slam algorithms performance[A].2008 Performance Metrics for Intelligent Systems archive Proceedings of the 8thWorkshop on Performance Metrics for Intelligent Systems table of contents Gaithersburg[C].Maryland: ACM Press,2008: 271-277.
[13]Junqing,W,et al.A prediction-and cost function-based algorithm for robust autonomous freeway driving[A].2010 IEEE Intelligent Vehicles Symposium (IV)[C].San Diego,CA: IEEE Computer Society,2010: 512-517.
[14]Van Diggelen,J,et al.A usage-centered evaluation methodology for unmanned ground vehicles[A].2012 5thInternational Conference on Advances in Computer-Human Interactions[C].Valencia,Spain: IARIA XPS Press,2012: 186-191.
[15]Wikipedia.Smart car[DB/OL].Http: / /en.wikipedia.org/wiki/Smart_car,2009-5-20/2015-2-17.
[16]李德毅.不确定性人工智能[M].北京:国防工业出版社,2005.51-200.
[17]李德毅,孟海军,史雪梅.隶属云和隶属云发生器[J].计算机研究和发展,1995,32(6) : 15-20.
[18]李德仁,王树良,李德毅,等.论空间数据发掘和知识发现的理论与方法[J].武汉大学学报(信息科学版),2002,27(3) : 221-233.LI De-ren,WANG Shu-liang,LI De-yi.Theories and technologies of spatial data mining and knowledge discovery[J].Geomatics and information science of wuhan university,2002,27(3) : 221-233.(in Chinese)
[19]刘桂花,宋承祥,刘弘.云发生器的软件实现[J].计算机应用研究,2007,1: 46-48.LIU Gui-hua,SONG Cheng-xiang,LIU Hong,Software implementation of cloud generators[J].Application research of computers,2007,1: 46-48.(in Chinese)
[20]吕辉军,王晔,李德毅,等.逆向云在定性评价中的应用[J].计算机学报,2003,26(8) : 1010-1014.LU Hui-jun,WANG Ye,LI De-yi,et al.The Application of backward cloud in qualitative evaluation[J].Chinese Journal of Computers,2003,26(8) : 1010-1014.(in Chinese)
[21]G Schøner,et al.Dynamics of behavior: theory and applications for autonomous robot architectures[J].Journal of Robotics and Autonomous Systems,1995,16(2-4) : 213 -45
[22]U Nehmzow.Mobile Robotics: A Practical Introduction [M].Berlin: Springer,2003,30-42.
[23]E Gat.Towards principled experimental study of autonomous mobile robots[J].Journal of Autonomous Robots,1995,2(3) : 179-89.
[24]Duckett T,Nehmzow U.Quantitative analysis of mobile robot localisation systems[J].Proc Timr Uk,1997: 1361 -6153.

高洪波(通信作者)男,1982年11月出生,安徽安庆人,现为北京航空航天大学计算机学院博士研究生.主要研究方向为不确定性人工智能、云模型、无人驾驶、机器学习、数据挖掘.E-mail: ghb48@126.com

张新钰男,1979年10月出生,甘肃会宁人,现为中国人工智能学会副秘书长,剑桥大学访问学者.主要研究方向为智能机器人与网络教育
E-mail: xyzhang@ mail.tsinghua.edu.cn
Research of Intelligent Vehicle Variable Granularity Evaluation Based on Cloud Model
GAO Hong-bo1,2,ZHANG Xin-yu2,ZHANG Tian-lei3,LIU Yu-chao4,LI De-yi1,3,4
(1.State Key Laboratory of Software Development Environment,Beihang University,Beijing 100191,China; 2.Information Technology Center,Tsinghua University,Beijing 100083,China; 3.Department of Computer Science and Technology,Tsinghua University,Beijing 100083,China; 4.The 61th Institute of Electronic System Engineering,Beijing 100039,China)
Abstract:A direct,easy-to-operate and effective evaluation method for building a qualitative and quantitative uncertainty evaluation transformation model is urgently needed for intelligent vehicle evaluation research.It has been a challenging problem facing the researchers.Based on cloud model and variable granularity,this paper describes a measurement method.First,we proposed a set of 4S variable granularity measurement system and the three-level IQ variable granularity evaluation system.Then,we transformed the qualitative assessment over the intelligent driving vehicle into a direct image quantitative evaluation via using the Expectation,the Entropy and the Hyper Entropy of cloud model,thus building an uncertainty transformation model from qualitative to quantitative.The Future Challenge 2013 was used as a case to illustrate the model.The analysis shows that in the qualitative and quantitative evaluation,the Expectation,Entropy and Hyper Entropy based on cloud model is the basis of qualitative-evaluation of quantitative evaluation.Moreover,the intelligent vehicle evaluation based on cloud model and variable granularity can efficiently solve the multi-objective particle size measurement of evaluation and descriptive qualitative evaluation of quantitative evaluation,thereby providing solutions to the evaluation of a class of intelligent vehicle research.
Key words:cloud model; variable granularity; intelligent vehicle; evaluation research
作者简介
基金项目:国家863计划(No.2015AA015401) ;国家自然科学基金重大研究计划专项(No.90920305) ;国家自然科学基金(No.61305055,No.61035004,No.61273213,No.61300006,No.61203366) ;中国工程院项目(No.2015-XY-42)
收稿日期:2014-12-17;修回日期: 2015-10-28;责任编辑:马兰英
DOI:电子学报URL: http: / /www.ejournal.org.cn10.3969/j.issn.0372-2112.2016.02.018
中图分类号:TP3
文献标识码:A
文章编号:0372-2112 (2016) 02-0365-09
