汽车四轮转向的最优控制分析
2016-05-30宰文洁

摘 要:随着我国经济社会的进步,汽车行业蓬勃发展。为了提高汽车四轮在实际操作中的稳定性,必须建立四轮转向的最优模型控制,不断改善汽车行驶轨迹的稳定性,实现汽车的稳定良好控制。其中,本文在我国汽车四轮转向技术的发展现状以及趋势分析的基础上,重点探析了我国汽车四轮转向的最优控制设计研究与研究的现实意义,对于相关工作人员的研究具有一定的借鉴参考价值。关键词:四项轮汽车;最优控制;设计分析;设计研究
1 我国汽车四轮转向技术的发展现状以及趋势分析
1.1 我国汽车四轮转向技术的发展现状
汽车四轮转向系统的实现方式在结构上可以分为机械式、液压式、电动式以及复合式。关于汽车四轮转向的研究,许多学者一般以线性控制理论为基础,进行四轮转向和主动前轮转向的控制算法。而我国的汽车工业发展起步较晚,四轮转向技术的研究也较为缓慢。但是,随着科学技术的不断升级发展,我国在车载模型研究控制方法、横摆角速度信号的测量上实现了低成本、高效率、准精度的突破。同时,对于 4WS车辆的操作稳定性以及鲁棒性方面的研究在最优随动控制上都取得了重大进展。特别是基于质心侧偏角的最优控制算法也取得了突破发展。
1.2 我国汽车四轮转向技术的发展趋势分析
1.2.1 汽车四轮转向研究存在的发展问题
国内对于汽车四轮转向的研究发展起步较为缓慢,在机械、液压、机电等方面的研究涉及甚少。在汽车四轮的转向研究上,从理论研究到实际工程的研究上,必须重视后轮转向执行的相关研究。它的好坏直接决定着汽车能否发挥其在动力转向方面的优势。后轮转向的性能研究的成功直接关系到汽车企业生产制造的成本低廉、安全可靠等方面的内容。除此之外,还要考虑到轮胎非线性特性对于汽车四轮转向控制的影响,在进行四轮转向汽车状态的估计的研究上,也要对于摆角速度、前后轮转角、质心侧偏角以及路面系数等等都要进行测量。同时,要建立四轮转向控制系统内外环联合控制仿真平台,不断将整车的性能最优控制系统化都是汽车四轮转向当前面临的发展问题。
1.2.2 汽车四轮转向今后的研究发展方向
目前,基于 V模式的开发设计被很多汽车开发商所应用,在硬件仿真技术方面也不断升级更新。因此,在后续的汽车四轮研究方向中要不断将新概念的开发设计流程不断推广使用,结合硬件在仿真技术设计出更加准确的反映车辆运动状态的仿真平台。
2 我国汽车四轮转向的最优控制
2.1 关于轮胎侧偏特性对于转向性能的分析
2.1.1 汽车轮胎侧偏刚度对控制系统设计的影响
汽车轮胎的侧偏性是汽车稳定操作的重要因素,侧偏特性主要是指汽车运动过程中偏力、回正力矩与侧偏角之间的关系。侧偏力与侧偏角的符号相同,路面摩擦系数为特定的数值时,当侧偏力较大时,侧偏角则以较大的速率增长。曲线的斜率逐渐减小时,就会导致轮胎在接地面处发生部分的侧滑。最大侧偏力的值越大,汽车的极限性能就越好,汽车能够在正常的轨道上行驶。同时,值得注意的是,轮胎侧偏刚度超过线性区 [1],轮胎的刚度会变小,而需要四轮转向控制策略计算出较大的车乱转角,使得较大的轮胎侧偏力来保持汽车的稳定性和安全性。
2.1.2 轮胎侧偏刚度的分区和设定
在汽车四轮转向系统中,汽车轮胎侧偏刚度主要的影响因素是轮胎气压、垂直载荷以及路面摩擦系数的影响。当预知路面附着系数的前提下,可以根据系数基础下的轮胎侧偏刚度特性对于车辆进行控制,可以采用最小二乘法对于所划定的轮胎侧偏刚度进行计算,从而根据实际的数学计算得出最优化的问题。
根据魔术轮胎模型计算出来的刚度特性曲线,得到如下的计算效果 [2]。
2.2 关于四轮转向数学模型的建立
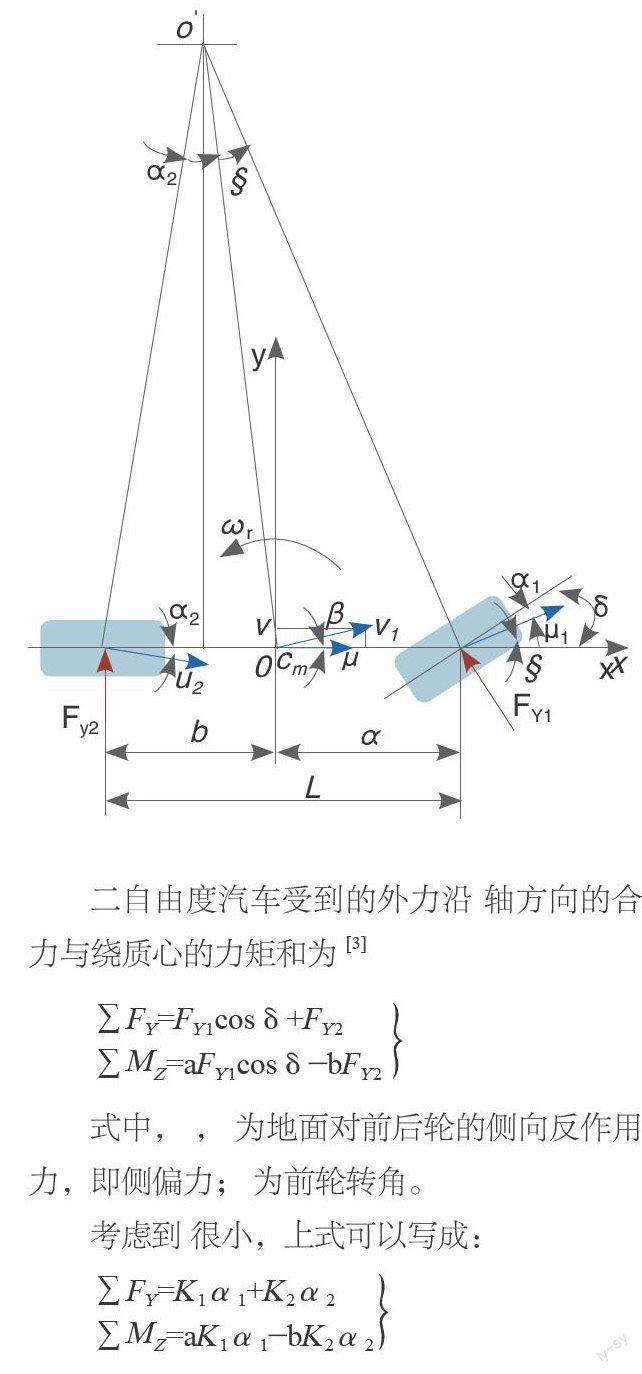
2.2.1 二自由度的汽车四轮转向动力模型的简述
二自由度车辆模型可以方便快捷的说明车辆操作系统在动力发展方面的特征,对于车辆在转向过程中的车辆不足转向以及转向过度的特性具有实际的作用。二自由度车辆模型对于汽车控制来讲是一个简单的实用的数学模型下图为计算汽车自由度的动力学方程。
2.2.2 关于二自由度四轮转向权模型
在汽车二自由度四轮转向权模型建立时,一定要充分考虑轮胎侧偏刚度非线性特性的车辆运动情况。通过相邻的两个轮胎侧偏刚度之间的用权函数来解决,从而实现车辆转向过程中的平滑过度。为了验证权函数的选取是否合理,对于前轮单胎和后轮单胎的的偏力角变化曲线进行研究 [4]。在实际研究中,为了验证二自由度权模型的准确性,可以对二自由度线性模型、二自由度权模型的仿真对比分析,能够更加准确的得到汽车的实际情况。
2.3 关于汽车四轮转向的最优控制设计策略
2.3.1 关于线性二次型最优控制
在解决汽车四轮转向问题上寻求最优二次控制就是追寻最优控制的方法。在进行线性二次方程的计算中,要仔细考虑对终端误差的变化,严格讲终端误差的代价函数植入到方程的计算中,保证达到终端状态的误差最小化。在积分项的计算中第二项与消耗的控制中成正相关的关系,消耗的值越大,性能指标越大。总而言之,通过性能指标最小则表示用合适的控制量来保持较小的误差,最终达到能量消耗、动态误差以及终端误差的最优化。
2.3.2 四轮转向车辆理想跟踪目标设计
在关于汽车转向的四轮稳定性能的控制上,一般是保持轨迹以及运动稳定性的问题。在轨迹稳定性问题上,可以将车辆作为一个质点,通过合理解决轮胎的纵向力和侧向力决定。汽车驾驶员在行车过程中沿着车辆的纵轴线方向,能够对于车辆质心侧偏控制在合理的范围。当汽车在低速行驶时,汽车的轮胎侧偏角很小,通过控制前后轮的偏转保持轨迹的稳定。但是,无论是高速行驶还是低速行驶,质心侧偏角维持在零左右 [6],一般有最佳的驾驶视野、能够更好的更完整的对于路面状况进行校正,得到合理的数据。
2.3.3 基于权函数四轮转向的设计研究
对于四轮转向汽车而言,在权函数四轮转向的研究上,可以通过双移线行驶对比分析进行探讨。当前后轮胎侧偏角平均值达到 6度左右时,轮胎侧偏刚度实现了从线性区到缓平区的变化。一般来讲,四轮转向车辆的侧向加速度比前轮转向汽车要小,然而前轮转向汽车的质心偏角相对较小,这样车辆能够在行驶过程中,更加接近期望的目标轨迹。同时,当四轮转向汽车以 80km/h行驶时 [7],汽车的前轮转向基本能够实现期望的行驶性能。
3 探析汽车四轮转向的最优控制的现实意义
四轮转向汽车在稳定汽车操作,提高汽车动力性能方面具有潜在的研究价值和应用发展前景。研究汽车四轮转向的最优控制,不仅是提高汽车操作稳定性,保证汽车在低速行驶的灵活性,同时研究汽车四轮转向对于高速行驶的汽车的稳定性和安全性具有重要的意义。
参考文献:
[1]杜峰,魏朗,赵建有 .基于状态反馈的四轮转向汽车最优控制 [J].长安大学学报(自然科学版).2008年 07月 15日版 .
[2]陈庆樟,孟杰,刘臣富 .汽车四轮转向的最优控制研究 [J].常熟理工学院学报 .2016年03月20日版.
[3]闫光辉,魏朗,陈涛 .主动四轮转向汽车最优控制及闭环操纵性仿真 [J].汽车工程.2014年 07月25日版.
[4]刘启佳 .四轮转向汽车侧向动力学最优控制和内外环联合控制研究 [J].北京理工大学博士毕业论文 .2014年 06月 01日版 .
[5]李辰旸,罗文广 .四轮转向汽车最优转向控制研究 [J].计算技术与自动化 .2013年12月15日版.
[6]王纪瑞,左曙光 .四轮转向汽车二次型最优控制策略研究 [j].佳木斯大学学报(自然科学版).2010年 01月 15日版 .
[7]余攀 .四轮独立转向驱动电动车控制系统设计及控制算法研究 [j].电子科技大学.2015年05月04日.
作者简介
宰文洁:(1986.09—),女,汉族,湖北武汉人,本科学历,武汉华夏理工学院汽车工程学院,助教。研究方向:汽车电子技术。
